


 下载:
下载:


-
近年来随着我国农业机械化的发展,丘陵山区广泛使用旋耕耕地技术导致农田土壤形成犁地层,不利于农作物生长,为改善这种情况,农业部提出实施深松整地技术并进行相应的补贴.深松整地可以打破坚硬的犁地层、加厚松土层,促进农作物根系下扎,增强抗旱抗涝能力,提高农作物产量和质量[1].深松作业的深度和面积是衡量深松整地作业质量的重要指标,因此通过监测作业深度和面积来评估深松作业的完成情况,并给予农户相对应的政策补贴.而传统的人工方式测量深松深度和面积,由于检测速度慢、精度低、劳动量大,已不再满足我国目前的农业发展形势[2].
目前国内对于深松作业的监测主要是通过仿形轮[3-4]、激光和超声波测距[5-7]、倾角传感器[8-9]等方法进行作业深度测量;通过基于GPS定位的航线法[10-11]、航迹法[12]和缓冲区法[13-14]计算作业面积.但这些研究主要集中在平整土地单台农机深度和面积测量,很少有适用于丘陵山区小地块的多台农机集成作业的远程监测系统.
本文采用角位移传感器间接测量深松深度,利用北斗/GPS定位模块,基于多边形解析法计算作业面积,并研制了农机深松作业远程监测终端和搭建了深松监测服务平台.最后在重庆市梁平区农委所管辖的分布在多个乡镇的30台农机设备上安装了监测终端,实现了深松作业的远程监测.这为加快农机深松整地技术的推广应用、政府部门实施农机深松整地作业面积核实、深松作业任务调度和作业补贴等提供了便利.
全文HTML
-
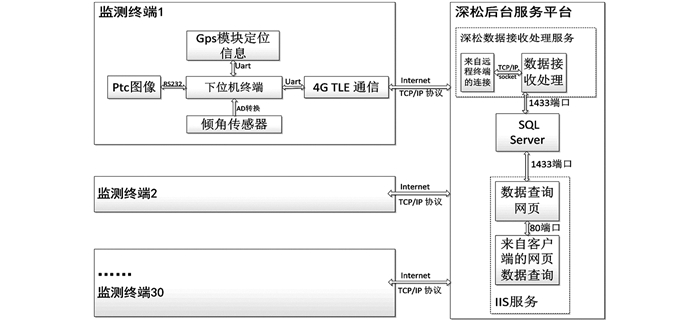
深松作业深度和面积远程监测系统由安装在农机上的监测终端和深松监测服务平台两大部分组成,结构如图 1所示,形成前端—后台分布式架构模式,以便后期监测终端的拓展,实现多台农机深松作业远程监测.
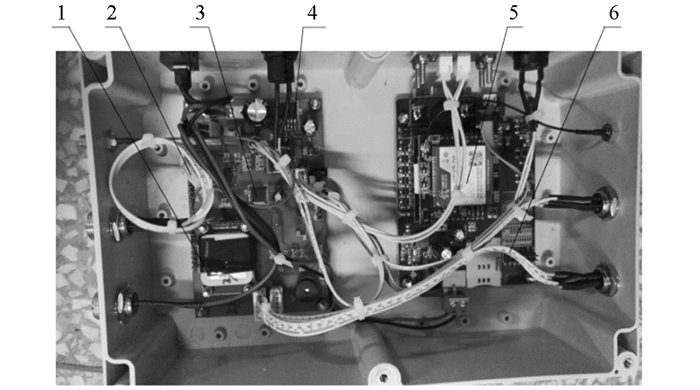
终端设备以STC15W4K60S4微处理器为核心,主要由北斗/GPS双模定位模块、角位移传感器、摄像头模块、4G通信模块和电源模块组成,实物如图 2所示.深松监测服务平台由深松数据接收处理软件、数据库、数据查询网页三部分组成.
其中北斗/GPS模块的型号为ATK-S1216F8-BD,单点定位精度2.5 m CEP,定位信息经卡尔曼滤波通过NMEA-0183协议输出,用做农机定位和作业面积计算;角位移传感器型号为WDD35D4,测量范围0~350°,用于测量深松深度;摄像头模块的型号是PTC01,用来远程监测深松作业现场;4G通信模块的型号为USR-TLE-7S4,使用TCP/IP协议与深松监测服务平台通信;电源模块用LM2596S芯片将车载蓄电池电压12V降压至5V给单片机和各个模块供电.
-
在农机作业过程中,监测终端每秒测量一次角位移传感器的输出角度,根据拖拉机、深松机和地面的几何关系计算出深松深度,每秒采集一次北斗/GPS定位数据,每15 min自动采集一次现场图片,并将深度数据、定位数据、图片数据和作业状态通过4G模块传输至深松监测服务平台,按时间和车牌号在数据库中存储.当农机完成一块农田的深松作业后,后台根据农机作业轨迹得到农田边界界址点,然后使用多边形解析法计算作业面积并保存到数据库,最后用户通过网页查询深松作业的深度、面积、现场图片(也可实现手动采集)、地点、轨迹等远程监测结果.
1.1. 系统结构组成
1.2. 工作原理
-
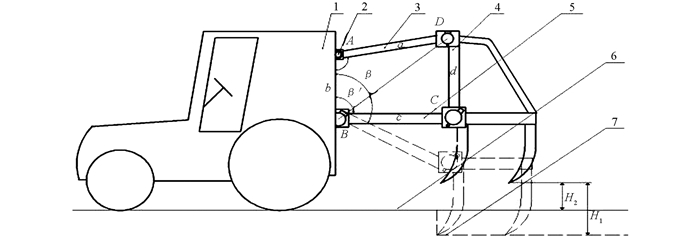
为了能够实时准确测量农机在丘陵山区深松作业过程中的作业深度,设计了一种以角位移传感器为核心的深松深度测量方法.如图 3所示,为了能在复杂的环境下正确测量深松作业深度,将角位移传感器安装在拖拉机与上拉杆连接的铰链上,并且使角位移传感器与铰链同心,角位移传感器的转轴使用螺纹与上拉杆转轴连接,用来测量上拉杆与拖拉机之间角度变化,然后根据拖拉机、深松机以及上下拉杆之间的几何关系推导出下拉杆的转动角度,最后通过下拉杆转动角度与深松深度之间的三角几何关系计算出实际的深度.
三点悬挂式拖拉机机身、上下拉杆与深松机之间组成了四连杆运动机构,如图 3所示,以点A、B、C、D为顶点,a、b、c、d为杆的长度,α为拖拉机机身到上拉杆之间的角度,β为拖拉机机身到下拉杆之间的角度.在ABCD中α的大小由角位移传感器得到,其角位移计算式,
式中:Vout为角位移传感器在5 V供电下的输出电压,(V);α单位为rad.在ABCD中连接BD,在两个三角形ABD和BCD中,使用余弦定理可计算出β的大小.在ΔABD中,
在ΔBCD中,
从而根据式(1)(2)(3)(4)计算出β的大小,
为方便在直角三角形中由下拉杆角度变化计算深松深度,以下拉杆与地面平行(β′=π/2)为计算零点,并测量保存此时的深度H2作为零点补偿值,规定顺时针转动为正、深松铲钻入地下深度为正;当进行深松作业时下拉杆转动至角度β,与零点位置(β′=π/2)成一定夹角,可根据正弦定理计算出作业时下调的距离H1,结合零点补偿H2可得到深松深度D,
最终可由上拉杆角度α,结合拖拉机、深松机和地面的几何关系计算出深松深度.
-
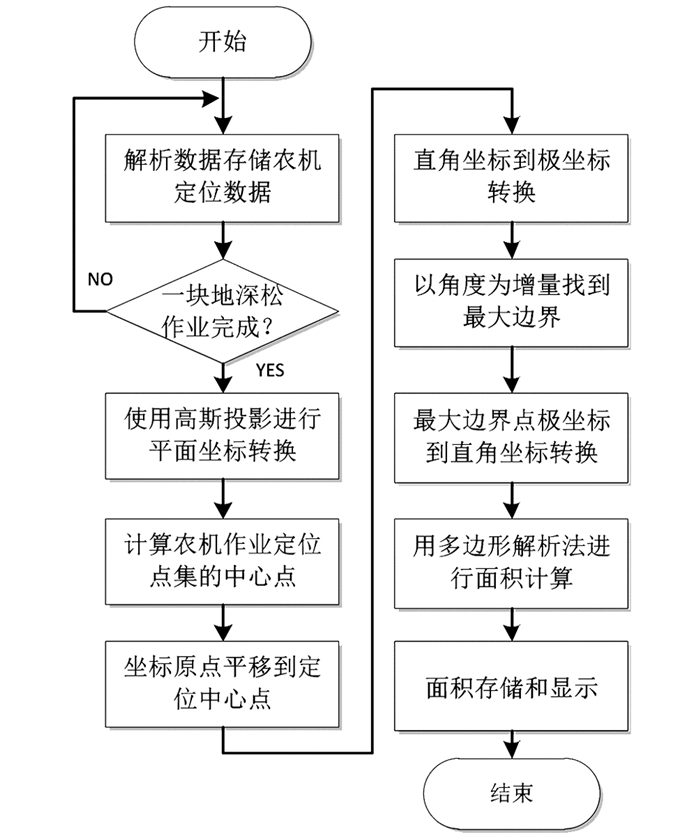
为提高小地块面积计算精度,本文采用北斗/GPS模块记录农机作业位置信息,当农机完成一块农田的深松作业后,先进行WGS-84坐标到平面坐标转换,然后找出农机作业区域的最大作业边界并进行滑动滤波处理,最后使用多边形解析法计算出作业面积,从而去除重复的作业面积并提高面积计算精度,便于面积的自动化测量.
-
由于北斗/GPS模块输出的定位信息遵循NMEA-0183标准,以WGS-84坐标为参考系,而计算面积需要在平面直角坐标系下完成,所以要使用高斯投影将球面坐标转换成平面直角坐标.
若以中央子午线与赤道的交点O为坐标原点,以中央子午线的投影为纵坐标轴,即x轴,赤道的投影为横坐标轴,即y轴,这就形成了高斯平面坐标系.由WGS-84坐标(B,L)求解平面直角坐标(x,y)的高斯投影公式为[13]
式中,B为ρ点的大地纬度,(rad);l为ρ点与中央子午线的经差,(°);C为由赤道至纬度B的子午线弧长,(m).可以由以下算式算出:
式中,
其中,β0、β2、β4、β8为修正系数;e′为第二偏心率;c为极点处的法截线曲率半径,(m).本文中测量数据在经度106°左右,选用3°带的第36带进行投影.
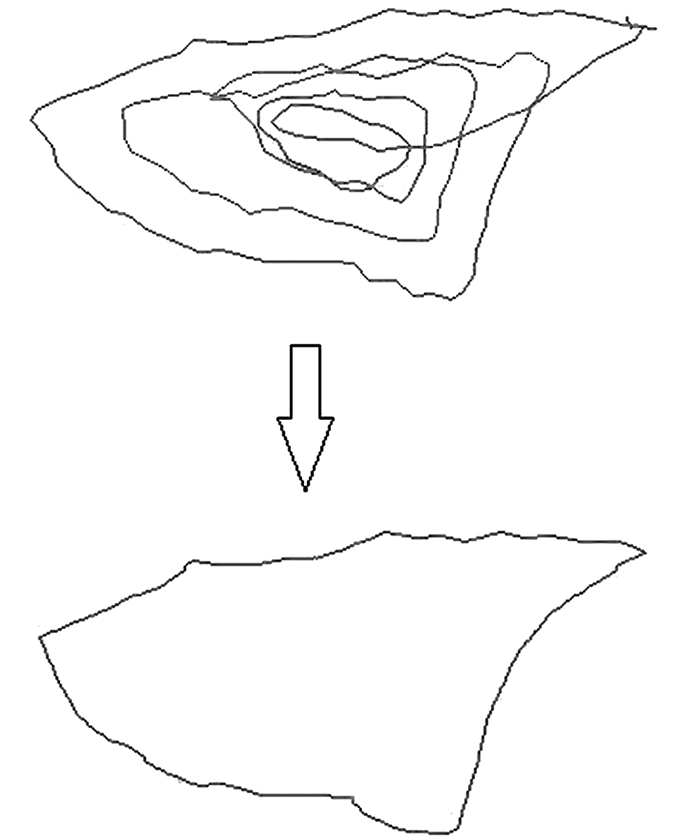
深松作业时安装在农机上的终端,每隔1 s采集一个定位坐标(Bi,Li),得到农机作业轨迹点将覆盖整个作业的区域,经式(7)平面坐标转换后将直角坐标下作业轨迹点记为
$D = \{ \left( {{x_1}, {y_1}} \right)\left( {{x_2}, {\rm{ }}{y_2}} \right) \ldots \ldots ({x_n}, {\rm{ }}{y_n})\} $ ,再在极坐标下,以极坐标角度为增量,扫描出每个角度增量下的最大半径值作为边界点,再然后得到在直角坐标下边界点并进行滑动滤波处理,如图 4所示.将得到的边界点坐标依次记为$ d = \left\{ {\left( {{x_1}, {y_1}} \right)\left( {{x_2}, {\rm{ }}{y_2}} \right) \ldots \ldots \left( {{x_i}, {\rm{ }}{y_i}} \right)} \right\}$ ,其中$ \left( {{x_1}, {\rm{ }}{y_1}} \right) = ({x_i}, {\rm{ }}{y_i})$ ,由i-1个点围成的没有边际相交的多边形面积,计算公式为[15]面积计算流程图如图 5所示.
2.1. 深松深度测量
2.2. 深松面积计算
2.2.1. 面积测量方法
2.2.2. 面积计算
-
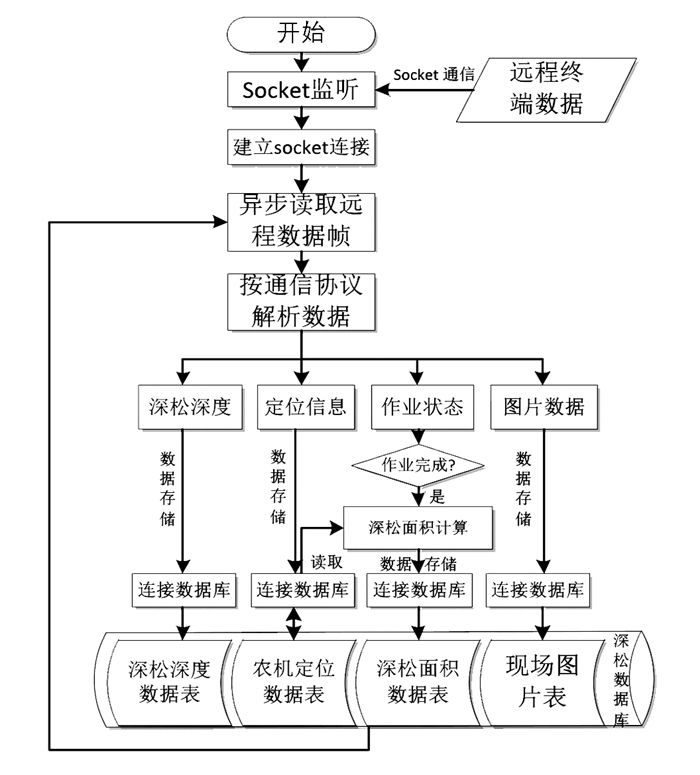
整个后台服务以Windows Server 2016 Standard为平台,使用Visual Studio 2010 C#,基于·NET Framework4.0开发.深松数据接收处理软件用于接收和处理来自农机终端上的数据,主要完成深度和面积计算,并将结果保存到数据库中,业务流程如图 6所示.数据存储使用SQL Server 2005 Developer,将深松数据接收处理软件得到的定位信息、图片信息、深松深度和面积按农机车牌以时间顺序进行存储.数据查询网页,用于深松作业监测结果查询,主要实现了在线农机展示、农机运行轨迹、深松作业现场图片查看和采集、深松深度以及面积统计查询,业务流程如图 7所示.
-
为验证丘陵山区深松作业深度测量、面积计算的准确性以及监测平台运行的稳定性,在重庆市梁平区安装了监测终端进行农机作业深度、面积准确性试验和监测平台长期运行稳定性试验,深松深度和面积准确性试验所用拖拉机型号为东方红904,所使用的农具是深松旋耕联合一体机,如图 8所示.
-
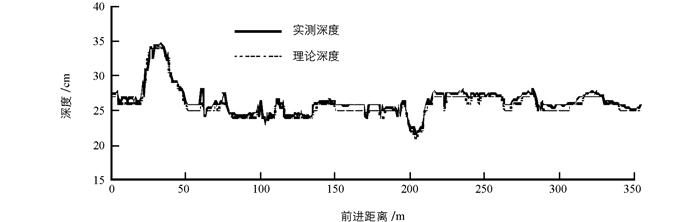
农机在深松作业过程中通过终端设备测量出的作业深度记为实测深度Di,人工将直尺插入已深松的土壤中测量的深度记为理论深度di,并以深松前进的距离为横轴,得出实测深度与理论深度对比曲线,如图 9.试验结果表明,使用角位移传感器测量的实测深度与理论深度相接近,平均误差为0.98 cm,说明使用角位移传感器能够准确地测量出深松深度的大小,满足深松作业深度测量需求.
-
为了检验适用于丘陵山区小地块深松作业面积计算的准确性,在重庆市梁平区选取大小不同的3块农田进行了面积计算精度试验,每一块农田进行重复3次作业并计算面积,根据人工方式测量出的标准面积计算出相对误差然后取其平均值,结果如表 1所示.
试验结果表明,深松面积计算在农田面积很小的情况下相对误差较大,3次测量平均相对误差为3.2%,并且随着作业面积的增大误差呈现减小趋势,且误差在可接受的范围内,满足深松面积监测的需求.
-
为了验证深松监测服务平台运行的稳定性,对平台进行了运行稳定性测试.首先编写了模拟30台终端设备的测试软件,发送模拟作业数据到深松监测服务平台进行7×24 h的运行稳定性试验,根据运行日志,在测试期间深松数据接收处理软件能及时响应数据接收与处理,未出现数据堆积和程序崩溃情况,运行稳定;数据库运行负载均衡,运行情况良好.然后深松监测服务平台对用户开放进行使用测试,并追踪了两周的使用测试情况,在使用测试期间深松监测服务平台运行情况稳定,满足运行稳定性需求.
4.1. 深松深度测量试验
4.2. 面积测量试验
4.3. 深松监测服务平台稳定性测试
-
本文设计了一种适用于丘陵山区的深松深度测量和面积计算方法,利用角位移传感器测量深松机与拖拉机之间角度的变化,根据拖拉机机、深松机和地面之间的几何关系计算作业深度,与实际测量对比,平均误差为0.98 cm;利用北斗/GPS定位,然后通过极坐标法找到作业最大边界,使用多边形解析法计算出作业面积,平均相对误差3.2%;并在此基础上搭建了适用于多台农机的深松作业远程监测服务平台,实现了农机深松作业的深度和面积的远程监测.
丘陵山区深松作业深度和面积远程监测系统能够很好地适用到农业机械化生产中,并能完成深度和面积的远程监测,实现了深松整地作业面积核实、深松任务调度和作业补贴等目标.