


 下载:
下载:
-
在野外,用机器视觉识别紫色土,获得的紫色土视觉图像中往往包含植物、杂草等背景,为了避免背景干扰,从背景中分割提取紫色土区域图像是首要的工作[1].紫色土视觉图像复杂,使目前许多基于图像的颜色特征聚类[2-4]、边缘[5]、区域生长[6]、阈值[7-9]的分割算法失效.提取目标是一类特殊的分割算法,Sziranyi T等[10]提出了一种结合图像的相似性度量和马尔科夫随机场的分割算法,算法对遥感图像分割效果较好,Hou B等[11]先对图像进行特征的分解,再采用迭代聚类算法对图像超像素进行聚类,Despotovic I等[12]提出了一种改进的FCM算法,将局部图像特征的空间信息集成到相似性度量和隶属函数中,提高了算法的鲁棒性.但这些算法用于从复杂背景中分割提取紫色土区域图像的效果不佳.
全文HTML
-
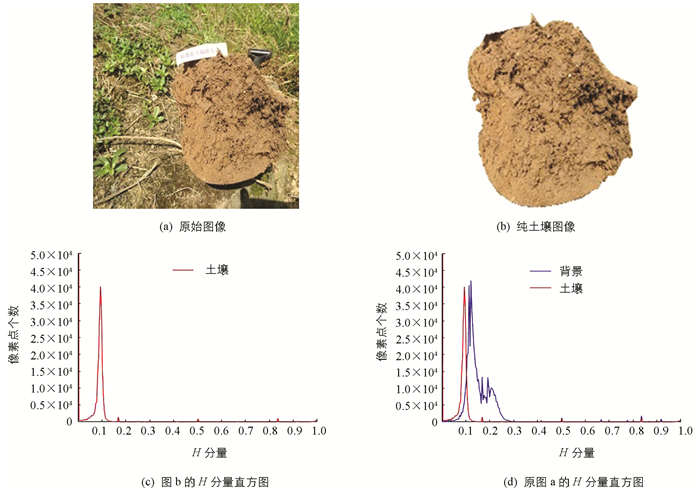
对野外自然环境下拍摄的紫色土自然断口图像(分布于重庆市璧山区,共4属34土种102张)进行颜色空间聚集度分析,结果(图 1)显示:紫色土区域图像在H域上独有区别于背景的聚集特性;经检验,其不符合任何一种标准分布[13].根据随机变量分布的切比雪夫(Chebyshev)不等式,获得H域概率密度的界估计:
取ε值下界,获得H域阈值的估计:
其中,H域值的数学期望为μ,方差为σ2,概率值为P.
-
用切比雪夫不等式估计紫色土H域的阈值,需要紫色土区域的图像样本.为了便于获取紫色土图像样本,实现自动分割,规定:土壤分布于视觉图像的中心区域,并有足够的面积占比,以确保分割提取的图像为紫色土.
-
算法1是在H阈值矩阵中心附近区域随机抽取5个或7个M×M子阵,剔除均值最大和最小的子阵,用剩余子阵的全部元素为样本估计紫色土图像区H域值的统计分布,减小了土壤杂质对紫色土区域图像H域的总体统计分布特征值估计的影响,保证了均值μ和标准差σ的精度.但人为设定的置信概率P(如P=95%),表示紫色土区域图像中P(95%)为纯土壤,1-P(5%)为杂质,人为设定方法不具有科学性.
1.1. 算法思想
1.2. 切比雪夫不等式H阈值分割算法
1.3. 算法分析
-
根据算法1的分析可知,人为设定的置信概率P影响分割效果.在土壤图像H域值矩阵中心点附近(在对应紫色土区域图像内)随机(可重叠)抽取5或7个M×M子阵(M为3的倍数),剔除均值最大和最小的子阵,计算剩余子阵全部元素的均值μ.用3×3小子阵不重叠平铺满M×M区域,计算每个3×3小子阵相对于μ的标准差σi.存在将子窗分为两类σT,即σi≤σT的第0类和σi>σT的第1类,则
其中,
式中,m为第0类的子窗个数,k为第1类的子窗个数.
建立最优化模型:
求解模型(10)获得标准差σT.紫色土区域图像中纯土壤的概率测度P为
其中,N3×3是3×3的小子阵总数,Nsoil是σi≤σT的小子阵个数.
-
根据2.1的算法思想改进算法1,获得的基于切比雪夫不等式自适应H阈值的紫色土分割算法如算法2所示.
-
算法2根据图像特征,自适应求取每张待分割图像紫色土区域中纯土壤的概率测度P,比算法1人为设定的置信概率P科学合理.相应地,算法2也增加了建立和求解优化模型的时间花销.
2.1. 自适应H阈值的算法思想
2.2. 切比雪夫不等式自适应H阈值分割算法
2.3. 自适应H阈值分割算法分析
-
野外自然环境下拍摄的紫色土图像,因土壤表面凹凸不平会形成光照阴影.光照阴影和土壤中的杂质对确定土壤分割H阈值会造成干扰[14].于是,在背景区域会有在H阈值范围内的孤立像素或像素块,和土壤区域在H阈值范围外像素形成的空洞,需要进一步剔除孤立像素点(块)和空洞填充,以提取完整的土壤区域图像[15-19].
-
分析3×3二值子阵的8邻域(令土壤为1,非土壤为0),如果遍历点(i,j)的元素为1,将遍历点(i,j)的8邻域的值拷贝进来,然后(i,j)按螺旋遍历移位到下一遍历点;如果遍历点(i,j)的元素为0,(i,j)直接移位到下一遍历点.如果螺旋遍历出发点是算法1,2获得的二值矩阵A的中心点信息,按照上述更新规则更新一个初始值为全0的矩阵,再螺旋生长出紫色土区域.为了提高螺旋生长算法的鲁棒性,避免算法1,2获得的二值矩阵A中心点恰好为0的情形,设置全0标记矩阵B,将矩阵A中心位置的l×l子阵拷贝到矩阵B的相应位置,然后从矩阵B中心点出发螺旋生长.只要l×l不全为0,就能螺旋生长出紫色土区域图像.获得的土壤区域图像的螺旋生长算法如算法3所示.
-
紫色土区域中的任意一个空洞在矩阵B中是一个值全为0的连续区域,空洞任一像素必然具备上、下、左、右4个方向的空洞与土壤的边界点.定义判断边界点的卷积计算公式如下:
其中,B3×3′(i,j)是二值矩阵B中以点(i,j)为中心的3×3子阵,E3×3为3×3的单位矩阵.
紫色土区域的空洞填充算法如算法4所示.
基于4方向边界点确认紫色土区域的空洞填充子算法描述如算法5所示.
-
应用算法4获得的二值矩阵C与RGB紫色土自然断口土壤原始图像进行哈达玛积,提取紫色土土壤区域图像.
3.1. 剔除孤立像素点(块)
3.2. 空洞填充
3.3. 提取土壤区域图像
-
根据重庆市地方标准《DB50/T 796-2017重庆土壤分类与代码》,在重庆市璧山区采集分布的全部(4属34土种)紫色土的视觉图像[20],其方法是:在野外自然环境下用土锹锹出耕层0~20 cm左右的紫色土,拍摄其无锹痕的(心土)自然断口图像(心土能最大限度地保持紫色土自然颜色和原状土壤结构)102张,作为实验图像样本.
-
在Intel(R) Core(TM)i5 3370U CPU,1.70GHz,内存8GB的PC机上,Windows 7专业版,VC++2015与OpenCV3.4环境下进行仿真实验.
-
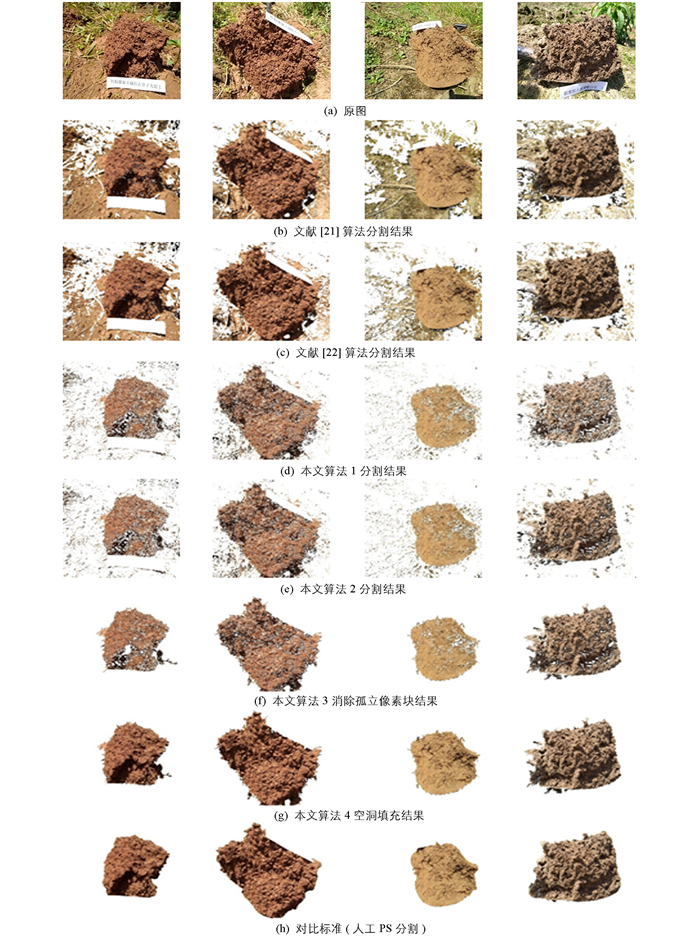
随机抽取4张紫色土图像构成一组实验图像,共计20个紫色土图像组,全覆盖了璧山区分布的4属34土种紫色土.分别采用基于邻域灰度信息的模糊C均值分割算法[21]、加权色调和强度的模糊C均值算法[22]与本文算法1,2进行对比分割仿真实验;然后,再用本文算法3,4进行后处理.用这20组紫色土实验图像进行仿真实验,获得的实验结果是相似的,部分结果如下所示.
-
实验图像分割、提取结果如图 2所示:
-
实验图像的分割效果及时间花销如表 1所示:
-
应用本文算法3,4对本文算法1,2的初分割结果进行后处理,处理效果及时间花销如表 2所示:
-
实验结果显示:文献[21]中基于邻域灰度信息的模糊C均值分割算法和文献[22]中加权色调和强度的模糊C均值算法不能有效分割野外复杂自然环境下拍摄的紫色土图像(图 2b和图 2c),表 1结果显示它们的平均误分割率(Err)分别达到64.81%和47.55%.本文算法1和算法2都能有效地分割紫色土图像(图 2d和图 2e),算法1的分割精度受到人为设定置信概率P的影响,算法2能实现自适应分割,分割出的紫色土区域图像更加完整. 表 1结果显示它们的平均误分割率(Err)分别为15.84%和13.64%,算法2的分割精度更高.算法1的平均分割耗时为0.12 s,算法2的平均分割耗时为0.27 s(表 1).算法2的耗时更大,是因其在算法1的基础上增加建立了优化模型,求解自适应置信概率P(获得自适应分割阈值)的算法步骤,从而增加了算法的时间花销.但由于算法1和算法2误分率的不同,初分割结果的后处理时间花销也不同,其平均后处理的时间花销分别是5.02 s和4.70 s(表 2),因算法2初分割出的紫色土区域图像精度高,减少了后处理的时间花销.
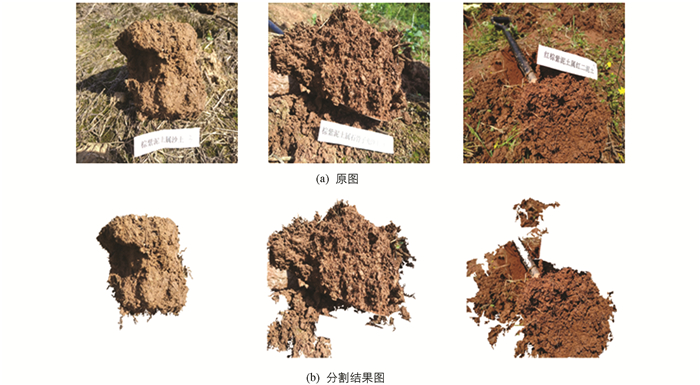
如图 3算法鲁棒性实验显示:当土壤图像中包含有大量阴影区域时,本文算法能准确地分割提取出阴影中的土壤区域;当图像的背景中包含有大量目标土壤时,本文自适应切比雪夫阈值分割算法能有效地分割提取出目标紫色土区域,但会导致非土壤区域成为空洞,导致本文空洞填充算法将其作为土壤区域进行错误的填充.
综合表 1和表 2的实验结果数据,本文算法2与算法3、算法4结合所用的总时间更少,分割提取出紫色土区域图像的误分率降低到3.24%,能高精度分割提取出紫色土区域图像,算法是有效的.
4.1. 实验图像样本的采集
4.2. 仿真实验环境
4.3. 分割实验结果
4.3.1. 分割实验的图像结果
4.3.2. 分割实验数据结果
4.3.3. 分割后处理实验数据结果
4.4. 实验结果分析
-
在计算紫色土的置信概率P中,应用3×3小子阵的标准差测度,使土壤的标准差相对向0点聚集,杂质的标准差相对远离0点,增大紫色土区域土壤与杂质的类间距离,有利于区分紫色土区域土壤与杂质;通过建立模型优化紫色土区域的土壤与杂质类间和类内方差比,获得优化的置信概率P,从而获得优化的分割阈值,实现基于图像自身紫色土特征的自适应分割.基于此获得的置信概率P有严格的数学基础,构建的切比雪夫不等式自适应分割算法,能提升初分割出的紫色土区域图像的精度.
表 2实验结果显示:从图像中心点出发的剔除背景区域孤立点和离散小土块的螺旋生长算法和基于4方向边界点确认的紫色土区域的空洞填充算法,分割提取的紫色土区域图像精度依赖于初分割精度.
仿真实验结果显示:自适应切比雪夫阈值分割算法与算法3和算法4结合,分割提取出的紫色土区域图像的误分率降低到3.24%,总时间花销更少,算法是有效的.