


 下载:
下载:










-
我国西南地区是茶树的原产地,但西南地区的地形以丘陵山区居多,独特的地形限制了对茶园的自动化管理.茶树的病虫害防护在茶树的日常管理中尤为重要,传统的喷杆式喷药装置无法实现高效、精准、低污染的喷药,导致了农药的浪费和土地的污染. F Solanelles,Viktor Jejĉiĉ和Aljaž Osterman[1-3]等人通过使用传感器及改良算法实现了喷雾器的精准对靶,A. Melese Endalew和M.Lesnik[4-5]等人通过构建CFD模型,通过风场分析改善风送装置,提高了喷雾附着效果.但国外研究人员对精准对靶和风送装置的研究仍在大中型拖拉机上展开的,而大中型拖拉机无法进入丘陵山区进行作业.国内研究人员姜红花[6]等人将物联网技术引入喷雾机中,进一步提高了喷药质量,Cai Jichen[7]等人运用网格划分的方法实时提取果树的几何特征,改善了喷药精度.我国在喷药领域的研究起步较晚,近几年数量显著增加,但是机械结构和算法复杂,无法广泛应用于丘陵山区.针对丘陵山区茶园喷药的管理,本文研制出自适性自动喷药装置,该装置机械结构紧凑、简单且能进入丘陵山区作业,该装置的控制系统主要由信息采集模块和执行器模块组成,通过软件控制来适应丘陵山区茶园不同地形及茶树形状,完成自动化喷药.
全文HTML
-
通过对重庆地区茶园进行实地勘察,茶树平均高度为0.6 m,茶园茶垄宽度为1~1.5 m,茶垄垄间距0.5~0.55 m.茶毛虫、茶黑毒蛾等多种茶园害虫栖息比较隐蔽,其低龄幼虫多在茶树中下部成熟老叶的背面取食[8],因此本文采用水平喷药和侧面喷药两种模式同时进行喷射,防治病虫的危害.
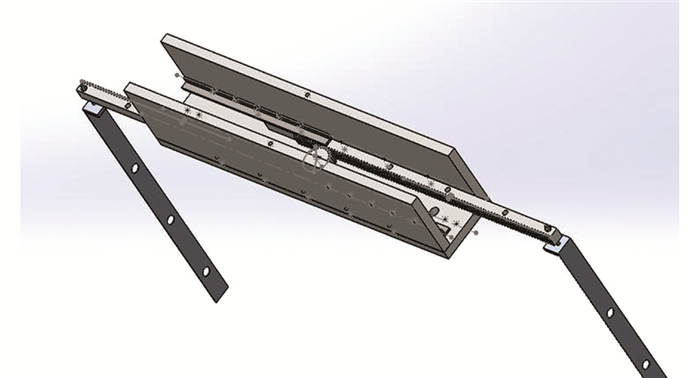
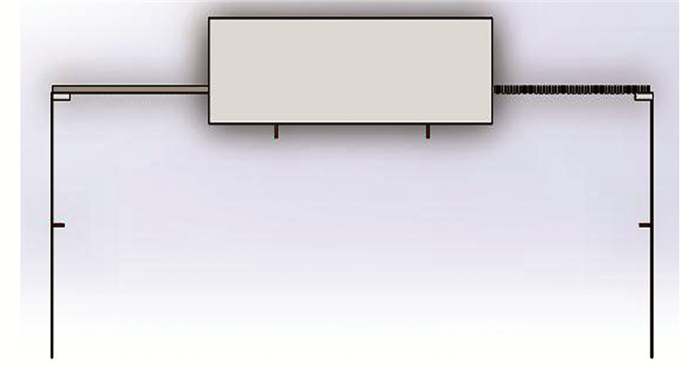
根据对茶园实地勘察的结果,对可调支架进行机械结构设计,可调支架主要由底座、水平支架、侧面支架和传动装置组成.底座长度为900 mm,齿条长度为1 000 mm,侧面支架长度设为750 mm.支架整体结构如图 1所示.在底座布置两个喷头,喷头间隔500 mm,两侧面支架分别布置1个喷头.喷头布置如图 2所示.
低容量喷雾适用于防治农作物页面病虫害,根据《NY/T650~2013喷雾机作业质量》规定,低容量喷雾机每公顷施液量应小于450 L,扇形喷头VP110-02在车速8 km/h下的理论喷液量为98 L/hm2,满足低容量要求,本文选用扇形喷头VP110-02用于茶树树冠方向和茶树侧面方向上的喷药.
-
本文所选扇形喷头VP110-02的最大流量为0.4 L/min且使用压力不低于0.3 MPa,喷药装置一共设有4个喷头,因此电动泵的流量不小于1.6 L/min,且需提供的压力不低于0.3 MPa,电磁阀使用压力不低于0.3 MPa.
查阅《农业机械设计手册》[9],得到估算药箱有效容积公式:
式中:Q为常用喷量(L/min),v为机组平均作业速度(km/h),扇形喷头VP110-02在v=8 km/h下的常用喷量Q=0.4 L/min,茶园一条茶树垄的距离约为20 m,设定喷药作业一个周期内工作100个来回,则工作100个来回的总行程L=4 000 m.即药箱的有效容积为Δ=43L.
为满足喷药流量和压力的要求,喷药回路系统主要由24 V蓄电池、DHE-7501直流电动泵、供药管路、43 L药箱、CJV23-C12A1电磁阀及扇形喷头VP110-02组成.喷药回路系统主要技术参数如表 1所示.
-
本文设计的传动为平行轴传动,利用齿轮齿条相互紧密配合,通过步进电机驱动,使得喷药支架同步移动,步进电机型号57HB113-401A,转矩3.6 N·m,额定电流4A.初选齿轮齿条参数如表 2所示.
将建立的三维齿轮齿条模型导入Simulation中,根据表 2设定材料属性,进行网格划分,齿轮网格单元大小为10 mm,齿条网格单元大小为12 mm.选取齿轮齿条的相接触面组,采用无穿透接触,对两齿条施加固定几何体约束,齿轮施加固定铰链约束.确定齿轮的加载方式为扭矩T=3.24 N·m.运行分析后得到齿面接触疲劳强度分析结果如图 3所示,材料Q235常温下的最大许用应力为235 MPa,齿轮齿条接触面最大应力为88.077 MPa,小于235 MPa,满足设计要求.
将建立的三维齿轮模型导入Simulation中,同样根据表 2设定材料属性,进行网格划分,齿轮网格单元大小为10 mm.对齿轮施加固定几何约束,确定齿轮的加载方式为力,水平方向分力大小为42.5N,竖直方向分力大小为15.5 N,运行分析后得到齿轮应力分布云图如图 4所示,材料16MnR常温下的最大许用应力为325 MPa,齿根处弯曲应力最大值为3.86 MPa,小于325 MPa,满足设计要求.
-
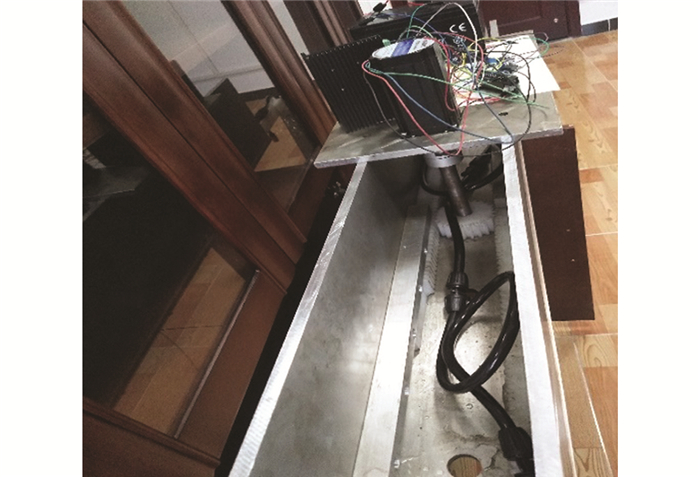
该装置主要由可调支架和自动控制系统两部分组成.喷药装置机械结构爆炸图如图 5所示,喷药装置实物图如图 6所示.
-
茶园喷药机械进入茶园后,喷药装置主控电路驱动超声波发射电路发射信号,超声波信号经过茶树冠树层的漫反射被超声波接收电路接收,转化成电压传回主控电路,主控芯片通过软件对采集的数据进行处理,判断喷头是否在喷药规定范围内,若在规定范围内,驱动电路打开电磁阀,若不在规定范围内,主控电路驱动步进电机,步进电机通过传动装置调节支架宽度,使得喷杆在规定范围内,再驱动电路打开电磁阀,完成自动喷药.
1.1. 支架设计与喷头布置
1.2. 喷药回路系统性能参数
1.3. 齿轮齿条传动设计
1.4. 喷药装置结构组成
1.5. 工作原理
-
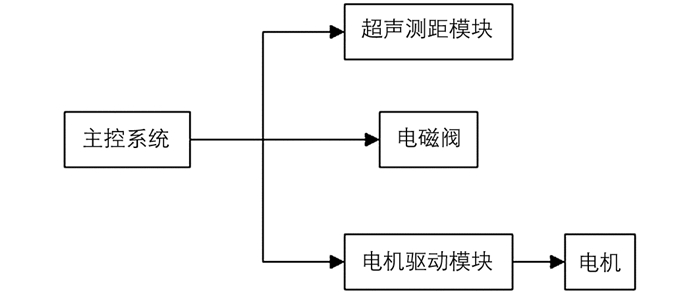
控制系统包括信息采集模块和执行器模块,本文以STM32F103作为微控制器,控制系统各模块间通过CAN总线进行通讯.信息采集模块通过速度传感器与超声波传感器对茶园管理机行走速度和喷药杆与茶树之间的距离进行采集.执行器模块主要实现对电动机和电磁阀的控制.该控制系统硬件组成框图如图 7所示,控制系统硬件实物如图 8所示.
-
超声波具有振幅小、波长短、方向性集中等优点,一般用于外型轮廓的探测[10].超声波模块测距是通过IO触发测距,给控制端口(Trig)一个大于等于10 μs的高电平信号,模块自动发射8个40 kHz的方波,自动检测信号返回,有信号返回通过IO输出高电平,高电平持续的时间就是超声波从发射到接收的时间.所测距离即
u:声速340(m/s); t:高电平持续时间(ms).
回响电平输出与所测距离成正比.超声波测距受环境影响小、精度高、价格廉价,综合考虑传感器成本及使用环境[11-12],本文选用HC-SR04超声波测距模块如图 9所示,束波角15°,上下各7.5°,测量范围20~4 500 mm.
-
装置选用DM542电机驱动器,步进脉冲信号输入接口PUL和方向电平信号输入接口DIR采用共阴极接法,使能脚ENA+与ENA-悬空,通过改变PUL和DIR端口的高低电平实现电机的正反转.
超声波测距模块将数据传给MUC,MUC通过软件分析比较,控制电机的正反转.
-
本文采用常闭式两位两通直动式直流电磁阀控制喷头的开闭.电磁阀的驱动电路利用L298N芯片的开关特性,含两个H桥的高电压大电流全桥式驱动器,具有独立双通道使能端,实现对两个电磁阀的控制.
2.1. 信息采集模块
2.2. 执行器模块
2.2.1. 电动机驱动电路
2.2.2. 电磁阀驱动电路
-
控制系统软件在uVision4开发平台上用C语言开发,分为信息采集和处理模块、电磁阀调节器模块和电机控制模块.
-
超声波模块的控制端口Trig和接收端口Echo分别与单片机的外部中断口P3.2和P3.3连接,通过定时和中断计数的方法获取距离.外部中断判断回波电平,定时器中断用作超声波测距计时.系统时钟为1/8晶振,定时器为12分频.测量结果的高8位与寄存器的低8位合成16位数据distance_data,据超声波测距原理Y(m)=(X*344)/2,即X(s)=(2*Y)/344=0.005 8*Y,从上述关系式中可得到定时器得到的定时时间(us)除以580等于所测距离(mm),所以测量距离为:
测距程序如下:
-
本文所选步进电机60HB102-401A为二相四线型,即该步进电机基本步距角为1.8°,电机转一圈需要给步进电机驱动器360°/1.8°=200个脉冲.本文所设计的齿轮齿条传动机构中,齿轮的分度圆直径为72 mm,则电机转一圈齿条的行程为72×3.14×1=226 mm.设定每次给步进电机100个脉冲,齿条对应的行程为113 mm.
当接口PUL=1时,电机正转,缩短齿条行程; 当接口PUL=0时,电机反转,增加齿条行程.电机的正反转由喷杆的位置决定,设定超声波测距模块所测距离在300~500 mm内时为检测到茶树信号; 若超声波测距模块所测距离<300 mm,给步进电机100个脉冲信号,接口置0驱动电机反转半圈后,再采集超声波测距模块距离与300 mm比较; 若超声波测距模块所测距离>500 mm,给步进电机100个脉冲信号,接口置1驱动电机正转转半圈后,再采集超声波测距模块距离并与500 mm比较.直到超声波测距模块所测距离在300~500 mm范围内时,为检测到茶树信号,打开电磁阀开始喷药.
-
单片机的输出控制口P1.0和P1.2与电磁阀驱动电路芯片L298的IN1和IN3端口连接.系统初始化后检测P1.0口的状态,超声测距信号传给单片机P1.0口,若测量距离在设定范围内,则P1.0=0,根据单片机信号处理,将P1.1与P1.2口置0,电磁阀打开,喷头工作; 若测量距离在设定范围外,则P1.0=1,单片机将P1.1与P1.2口置1,电磁阀关闭,喷头停止工作.
3.1. 信息采集和处理
3.2. 电机控制
3.3. 电磁阀控制
-
喷雾性能综合试验台,黑龙江省农业机械工程科学研究院研制,型号WFS-Ⅱ,液体体积测量精度±2 mL,喷杆上下移动范围300~700 mm,喷雾角测量精度±1°,雾滴直径准确性误差<3%,集雾槽间距50±0.5 mm,配套动力7 kW,水箱容积280 L.在田间测试喷雾机的喷雾性能时喷头的压力与流量、喷雾角、喷洒的均匀性无法有效并精准测量,而在试验室内的喷雾性能综合试验台上利用计算机视觉图像处理技术、超声波精确测距技术、传感器耦合技术和计算机综合控制技术,可以自动并精确地测量各个数据.
实验主要包括对扇形喷头的参数、雾滴粒径大小和喷雾均匀性测试.本文定义喷头到茶树冠表面的距离为喷药距离,喷药距离和流量压力是影响实验数据的两因素,本文采用两因素方差分析法,并考虑两因素之间的交互作用对实验数据进行统计处理.实验平台如图 10所示,喷杆上安装两个扇形喷头VP110-02,如图 11所示,两喷头之间的距离为500 mm.
-
实验采用工业黑白数字摄像头,分辨率:640*480 60FPS,定焦镜头焦距:8 mm.用量角器在闪光摄影图片上进行测量,测量在不同高度(h)下雾化微喷头的喷射范围,喷药半径(r)与喷射角度(θ).摄像机所采集到的图片如图 12所示,实验测得数据如表 3所示.
对每一个液滴进行受力分析,液滴水平方向上仅受到空气阻力fx,竖直方向上受到向下的重力mg以及向上的空气阻力fy.由牛顿第二定律可得
对公式进行分离变量,两边同时积分后带入初始条件即水平方向初速度Vx=V0,Vy=0,得到速度随时间的变化规律,将速度变换为坐标对时间的积分,可得位置随时间的变化为
由式(4),通过matlab中的sovle函数将参数方程化为y关于x的函数,运行程序后即可得到实际喷药过程中喷洒范围坐标函数关系为
设
$a=-\frac{m g}{k v_{0}}, b=-\frac{m^{2} g}{k^{2}}, c=-\frac{k}{m v_{0}} $ ,则式(5)可化为式(6)为考虑空气阻力时液滴在空中运动的轨迹,即喷雾距离(y)与喷药半径(x)关系实际模型,使用MATLAB软件将表 4中的喷头参数数据进行拟合运算,在95%的置信区间内拟合结果为
统计结果见表 4.
将样本点、理想曲线与实际曲线表现在一张图中,如图 13所示.
从图 13中得出结论:当喷射距离(喷头据茶树冠层表面的距离)在0~10 m范围内,空气阻力对喷射半径的影响可以忽略不计,即同一高度下理想喷射半径和实际喷射半径相同; 当喷射高度超过10 m时,受空气阻力的影响,同一高度下实际喷射半径比理想喷射半径小.
-
喷雾机械喷出的药液呈雾滴状态.雾滴的类型可根据雾滴粒径的大小分为烟雾滴(小于20 μm)、弥雾滴(50~100 μm)、细雾滴(101~200 μm)和中等雾滴(201~400 μm)等.在喷杆上装上扇形喷头VP110-02,由控制台控制扇形喷头VP110-02左右移动,喷头最大移动速度3 m/s,实验时使喷头通过采样皿上方一次,通过Winner激光粒度仪(济南微纳颗粒仪器股份有限公司,型号Winner319B,电源AC220V 50HZ)逐个数出所有采样皿的相同区域内雾滴的数量,并测定雾滴的粒径.实验所得数据处理结果如表 5所示.
从表中数据可以得出结论:雾滴的体积中径随着压力的增大而变小,扩散比随着压力的增大而变大.因为雾滴粒径小于100 μm时,更容易被植物吸收,DR>0.67,DR越接近1时,雾滴的粒径越均匀,所以本文设定喷头压力为0.35 MPa,喷头压力为0.35 MPa时的VMD(体积中径)为89.784 μm,小于100 μm,利于植物叶面的吸收.
-
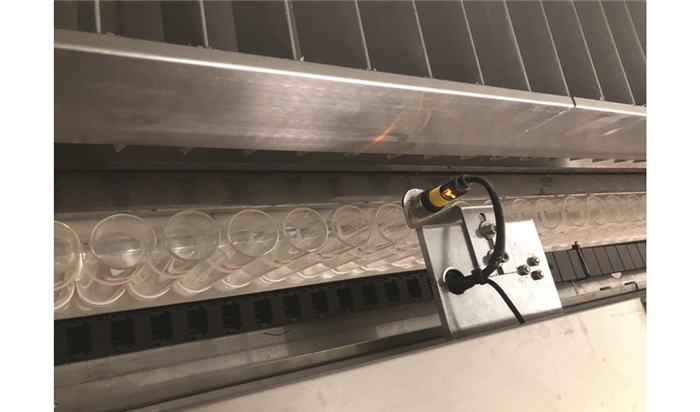
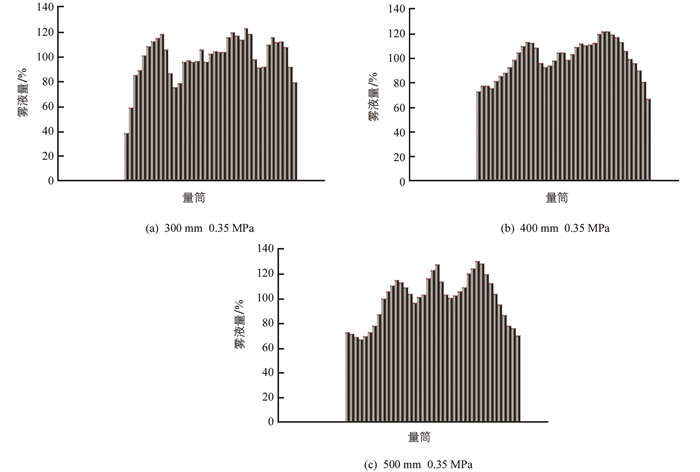
该实验使用喷杆进行实验,喷杆上共有2个喷头,喷头下方是若干个直径为50 mm的采样皿,采样皿收集的液体滴入相应试管内,如图 14所示,超声波液位传感系统自动读取试管内液量,如图 15所示,超声波液位传感器型号NU40A10TR-1,测量范围20~2 000 mm,重复精度0.5%+5 mm.本文装置喷药距离为300~500 mm,则设置此次实验的两个变量为300,400,500 mm 3个不同高度和0.15,0.25,0.35 MPa 3个不同压力,共绘制出9张液量分布图,在3个不同高度中选出各自最均匀的一张图出来,共3张液量分布图如图 16所示,由图可得出结论:共同高度下,压力越大的分布越均匀; 共同压力下,喷药距离为400 mm时,液量分布最为均匀.
变异系数是标准差与平均数的比值,即
变异系数代表了数据的离散程度,变异系数值越小则分布越均匀,《NY/T650~2013喷雾机作业质量》中机动喷雾机作业质量要求低容量喷雾液量分布变异系数小于50%.将喷头不同高度和不同压力设为a、b两个变量,a有1(300 mm)、2(400 mm)、3(500 mm) 3个水平,b有1(0.15 MPa)、2(0.20 MPa)、3(0.35 MPa) 3个水平,每次实验记录21个试管的液量,9次实验数据分析如表 6所示.
由表中数据可知a2b3的变异系数最小,变异系数越小则代表雾滴分布越均匀,即喷药距离为400 mm,喷头压力为0.35 MPa时,液量分布最均匀.
4.1. 实验条件
4.2. 喷头参数测定
4.3. 雾滴粒径大小测定
4.4. 分布均匀性测定
-
本文设计的丘陵山区茶园自动喷药装置,采用水平和竖直两种喷药模式同时进行喷射,使其茶树中下部叶面背部等喷射盲区能被覆盖,通过齿轮齿条传动的方式实现对不同尺寸茶树的喷药; 装置使用超声波传感器测距,通过软件控制实现自动化喷药.
通过对喷头参数、雾滴粒径大小和喷雾均匀性测试实验得出结论:喷头喷药距离为400 mm,喷头压力为0.35 MPa时,喷头综合性能最好,该喷药距离下空气阻力对喷头参数不造成影响; 该喷药条件下喷雾角为102.6°,雾滴粒径为89.784 μm,小于100 μm,容易被植物叶面吸收,液量分布变异系数值<50%,满足国家标准中机动喷雾机的作业质量要求.