



 下载:
下载:


-
开放科学(资源服务)标志码(OSID):

-
石漠化是在亚热带脆弱的喀斯特环境背景下,受人类不合理的社会经济活动的干扰破坏,造成土壤严重流失、基岩大面积出露、土地生产力严重下降,地表出现类似荒漠景观的土地退化过程[1-3]. 中国西南岩溶地区岩石类型主要为碳酸岩,其抗风化能力强,成土速度慢,石漠化一旦发生,很难恢复. 喀斯特地貌地形复杂,陡坡多,平地少,陡坡地区土壤容易受到雨水的冲刷形成石漠化,通常坡度大于15°的地区容易发生石漠化[4]. 同时,石漠化地区容易发生山洪、滑坡、泥石流,加上地下岩溶发育,导致水旱灾害频繁发生,几乎连年旱涝相伴. 此外,石漠化山地土壤少,贮水能力低,岩层漏水性强,很难给植物提供充足的营养,造成植被稀疏,加上不合理的耕作方式,过度开垦、乱伐乱放牧等人为因素,形成恶性循环,进一步加速了石漠化过程. 作为中国三大生态问题之一,喀斯特石漠化的治理已成为重中之重.
治理石漠化的前提是要准确及时地调查获取石漠化的现状及其分布特征,分析形成原因,然后采用有针对性的措施加以治理. 调查石漠化的传统方式是人工实地调查,实地调查精度高,但需要耗费大量的人力、物力,而且石漠化多存在于山高坡陡,人烟相对稀少的地区,所以实地调查不能全面完整地获得实际的石漠化状况. 随着遥感技术的发展,可以利用卫星遥感图像对石漠化地区进行调查与监测,但是卫星遥感受到传感器性能的限制,所获影像数据分辨率低、获取周期长[5],且需要结合实地调查进行精度验证,容易受到环境的影响. 此外,基于卫星遥感影像的地物分类精度也受到多方面的限制,例如无法准确判断阴影部分的地物覆盖类型. 卫星遥感调查与监测主要适用于石漠化呈大面积连片分布的地区[6],而对于石漠化早期阶段形成的小面积呈点状或线状零星分布的裸岩则无法有效识别.
无人机遥感技术的发展克服和突破了利用人工与卫星遥感影像调查石漠化状况的缺陷与瓶颈,得到了越来越普遍的应用[7-8]. 无人机设备相对较为廉价,便于运输和部署,实时性强,受云的影响较小[9]. 由于所获图像分辨率高,特别适用于以小面积破碎化分布裸岩为特征的处于早期阶段的石漠化地区的调查. 本研究以重庆市北碚区槽上局部为研究区,使用无人机获取高分辨率可见光影像,然后利用面向对象图像分析方法识别提取破碎化零星分布的裸岩,最后根据石漠化裸岩所占面积比例对试验区的早期石漠化状况进行评价.
全文HTML
-
研究区位于重庆市北碚区槽上地区,地处龙凤桥街道中梁山观音峡背斜的嘉陵江南段[10]. 气候为亚热带湿润气候,具有春早、夏热、秋迟、冬暖的特点. 雨水充沛,年平均降水量达到1 105.4 mm. 槽上属于典型的喀斯特槽谷地形,现有荒坡67 hm2,森林覆盖率不足18%,岩溶洼地、小盆地内漏斗、落水洞、地下暗河发育良好,地表排水网发育不良,地表水渗漏严重,用水紧张. 耕地大多分布于槽谷谷坡地带,石牙广布,单个地块面积小的不足1 m2,多数只有几十m2. 裸岩分布呈现明显的小面积破碎化特征. 槽上地区居民点用地分散,多数居民点位于土壤较好的槽谷低地. 槽上地区有12个采石场,采石取土破坏了植被和岩层稳定,引起水土流失和崩塌事故,破坏了当地的农业生产和可持续发展.
-
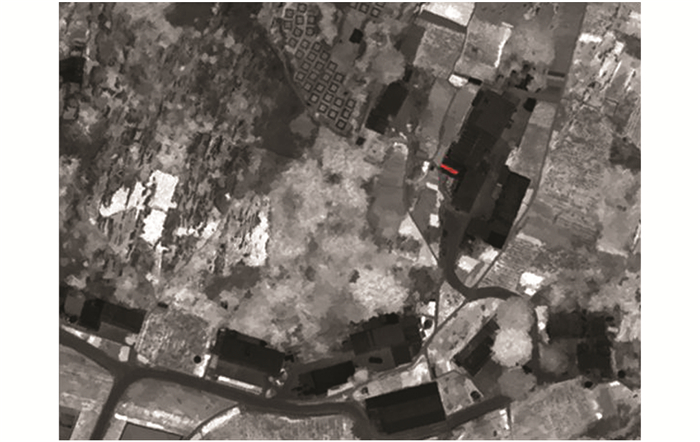
研究区无人机影像获取使用的平台为大疆精灵4专业版,载荷相机为SONY FC6310,焦距8.8 mm,像素尺寸5 472×3 648. 在航拍作业中,无人机飞行的相对高度为120 m,航向重叠率为85%,旁向重叠率为70%,采用的地理坐标系为世界1984大地坐标系统(WGS84),投影系统为通用墨卡托投影(UTM),区号为48. 所获取无人机遥感影像的空间分辨率为3 cm. 将影像输入Pix4D Mapper软件中进行处理,依次经过空中三角测量、匹配点加密、正射校正和镶嵌拼接,获取的研究区可见光正射影像如图 2所示. 由于图像边缘部分变形比较严重,且不规则形状影像对图像分析软件处理性能影响较大,因此后续面向对象分析主要针对矩形裁剪区内的试验区影像数据(图 2b),其总面积约为3.14 hm2. 该区域内除了零星分布的出露裸岩外,还包括植被、建筑物、道路、裸地和草地等类型,为研究方法的实现和验证提供了一个地物类型丰富的试验区.
1.1. 研究区概况
1.2. 无人机遥感影像
-
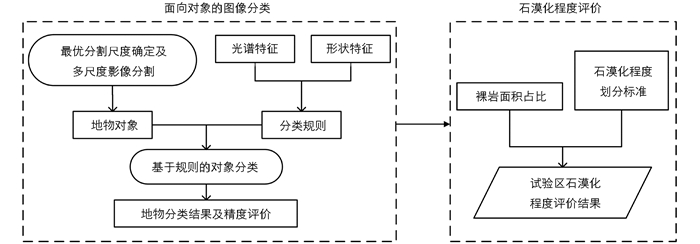
破碎化裸岩识别及早期石漠化调查评价的技术流程如图 3所示. 首先,利用多尺度分割将试验区图像分割成若干具有实际意义的影像对象. 其次,根据不同地物对象在光谱、形状上的特征定义相应层次的分类规则进行自动对象分类. 最后,根据识别提取的裸岩对象所占研究区的面积比例,参考划分标准对早期石漠化进行评价.
-
无人机影像有着丰富的空间结构信息和清晰的纹理细节信息,能准确表达对象的表面纹理、内部结构、形状面积和空间关系等. 面向对象方法综合了影像对象的光谱、形状、纹理、邻域、层次、空间位置等特征信息,通过分割影像得到同质对象,再根据目标地物的实际要求进行提取[11]. 因此,影像分割是面向对象图像分析方法的关键步骤之一,其分割原则是:影像对象内部同质性最大、异质性最小,通常需要输入3个参数:分割尺度、形状因子、紧凑度因子. 尺度参数是基于异质性最小的区域合并算法中的阈值,它直接决定了影像对象大小、分割的质量,甚至影响后续分类及信息提取精度[12].
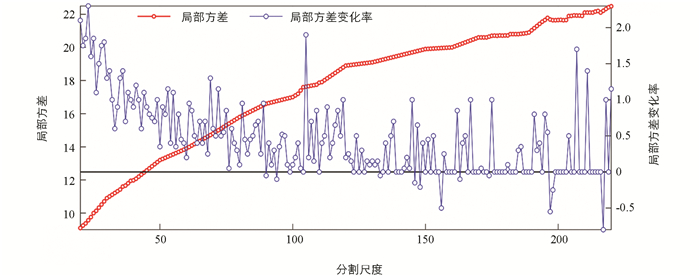
本研究利用影像分割尺度参数估计工具(Estimation of Scale Parameters,ESP)进行影像最优分割尺度参数的确定[13]. 它通过采用定量递增的尺度来对影像进行多尺度分割,然后根据目标对象来判断选择最优分割尺度. ESP工具将不同分割尺度参数下影像对象同质性的局部方差(Local Variance,LV)作为分割对象层的平均标准差,并用LV的变化率(Rate of Change of LV,ROC)来指示对象分割效果最优的尺度参数. 当LV的变化率最大即出现局部峰值时,该点对应的分割尺度为最优分割尺度. 一般最优分割尺度不止一个,这是由于不同的最优分割尺度是对应影像内不同地物得出的. 处理过程为:加载ESP工具,新建一个处理进程,选择ESP算法,设置好相关参数,包括初始值、步长值、循环次数等.
经过ESP处理后得到图 4,其中红色折线是局部方差LV,蓝色折线是局部方差变化率ROC,当ROC呈现峰值的时候,即为局部最优分割尺度. 根据上述原理,利用ESP工具对试验区处理,产生了若干局部最优分割尺度,其中尺度24,60,75,104,126,168依次对应分割结果图 5a-f. 从图 5可以看出,当分割尺度为24时,影像被分割得过于破碎(图 5a);分割尺度为60时,略破碎,没达到一次分割的目的(图 5b). 当分割尺度为75时,破碎对象相对较少,裸岩轮廓比较清晰(图 5c). 当分割尺度由104增加到168时,对象逐渐被大规模合并,不是理想结果(图 5d-f). 因此,可以确定本次分割的最优分割尺度为75.
-
面向对象的影像分类规则主要基于地物影像对象或子对象的光谱特征和形状特征来定义,然后利用所定义的分类规则分层次逐步对影像对象进行归类.
-
光谱特征包括亮度、标准差、平均值、最大平均差分、波段比率等[14-15]. 其中,提取植被常用的归一化植被指数NDVI就是一种波段比率,但是NDVI的计算需要近红外波段参与. 对于只有RGB(红、绿、蓝)3个波段的遥感影像,Meyer等[16]提出了一种植被指数VI,可以仅利用这3个波段通过自定义的特征计算方法获得. 在此基础上,何游云[17]整理简化VI的计算公式如下:
式中:G,R,B分别为可见光的绿波段、红波段和蓝波段.
表 1为试验区各类地物对应的VI数据统计. 图 6为计算得到的试验区VI特征影像. 根据表 1,植被VI值最大,且最大值、最小值以及平均值均远远大于其他几类地物,其平均值>0.166,其余几类地物平均值均<0. 植被与其余几类地物在VI特征值上具有较大的差异,利用植被指数VI区分植被与非植被具有很好的效果.
-
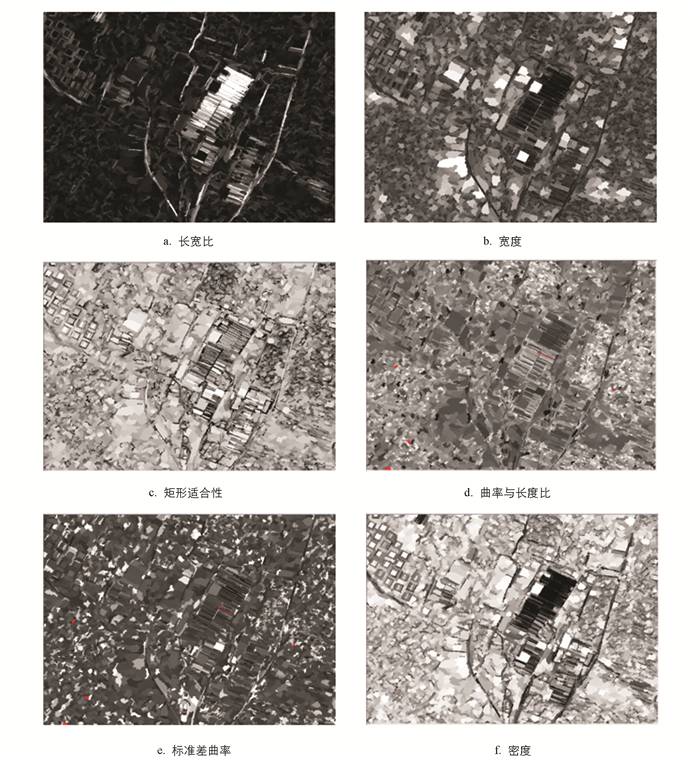
影像的形状特征主要包括长宽比、宽度、矩形适合性、曲率与长度比、标准差曲率与密度等[15]. 其中长宽比特征是影像对象边界框长度与宽度的比值;宽度特征指影像对象边界框的宽度值;矩形适合性描述了图像对象与大小和比例相似的矩形的匹配程度;曲率与长度比体现了线状地物的特点;标准差曲率与密度则是对象的紧致程度特征. 通过观察不同形状特征下的影像图,合理设置不同地物在该种形状特征下的阈值. 图 7a-f是基于试验区局部样本影像计算获取的与这些形状特征对应的结果影像.
-
对高分辨率影像进行多尺度分割之后,具有高复杂性和差异性的地物对象需要利用多种知识来判断其所属类型[18]. 试验区中的地物类型主要包括植被、建筑物、道路、裸地、裸岩和草地6类. 分类层次、对应的地物类型及具体的分类规则定义如表 2所示.
首先,在Level 1中主要识别的目标为植被,需要区分出植被与非植被. 无人机可见光影像没有近红外波段,需要利用2.2.1小节提出的植被指数VI对植被进行识别. 当VI>0.02且Maxdiff在[1.1,4]范围内时能够很好地区分植被与非植被. 其次,对非植被中裸地、人工建筑与其他类别可以通过相应的光谱特征以及形状特征值域来进行区分. 当Brightness处于[139, 153]范围且Mean(Green)处于[103, 132]范围时,能够较好地识别出裸地;人工建筑的识别条件是Brightness在[184, 280]范围内且Rectangular Fit值>0.81,然后将其他非植被地物赋类为其他类别. 在人工建筑中进一步区分出建筑物与道路. Length/Width特征能够较好地区分建筑物与道路,所以当Length/Width处于[1.7,3]范围且Maxdiff处于[0.4,0.6]范围时,可以区分出道路. 将区分出裸地、建筑物、道路后的非植被地物赋类为其他类别. 在其他类别中区分出裸岩和草地. 本研究主要目的是识别提取裸岩,当Density处于[0.2,1.9]范围时,基本可以分离出裸岩,然后将其他地物赋类为草地.
-
石漠化的本质是土地退化的过程,其等级的划分也应以土地利用的适宜性作为标准. 通常所说的石漠化早期、中期和后期阶段,实际是一种定性划分. 石漠化定量划分所参考的现状指标包括:植被覆盖率、岩石裸露率、土层厚度、植被类型等[19-20]. 其中,岩石裸露是石漠化景观最明显的特征,也是通过遥感技术能够直接观测和提取到的信息. 为了简化评价过程,本研究采用如表 3所示的基于岩石裸露率的喀斯特石漠化等级划分标准[21]. 因此,早期、中期和后期石漠化阶段对应的石漠化等级为微度、轻度、中度、强度和极强度,在表 3中分别列出了相应的裸岩分布特征.
2.1. 多尺度影像分割
2.2. 基于规则的对象分类
2.2.1. 光谱特征
2.2.2. 形状特征
2.2.3. 分类规则
2.3. 石漠化等级划分标准
-
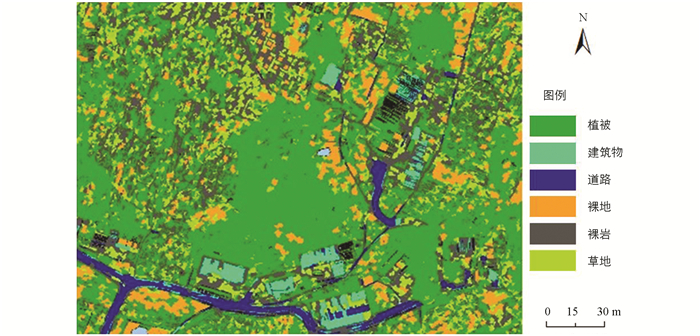
本研究使用德国Definiens Imaging公司的eCognition Developer 9.0(易康软件)来实现对试验区无人机遥感影像的多尺度分割、对象分类规则定义及自动分类,然后提取石漠化形成的裸岩. 根据2.1所述,裸岩提取的最优分割尺度为75. 依据经验并参考其他学者研究,形状和紧凑度因子均设为0.5. 在试验区影像分割结果基础上,利用2.2.3定义的分类规则,最终获得地物类型分类(图 8). 在分类过程中,道路两侧分割较细碎的斑块容易被错分为裸岩,灰黑色的建筑物也容易被误分成裸岩,而规则分类很好地规避了这些问题,较为精准地区分出了裸岩. 分类后还需要对一些破碎地物以及错分现象进行修改. 具体修改方法是将易康软件生成的多尺度分割矢量边界转成POI感兴趣区域,然后叠加在分类结果图上进行修改.
-
在ESRI ArcMap中,从试验区无人机遥感影像中随机选取335个样本点,通过目视解译确定样本点所属地物类别. 其中,植被为57个样本点,建筑物为54个样本点,道路为53个样本点,裸地为50个样本点,裸岩为77个样本点,草地为44个样本点. 根据分类结果建立混淆矩阵,计算规则分类方法下的生产者精度、用户精度、总体精度和Kappa系数,具体精度评价结果如表 4所示.
-
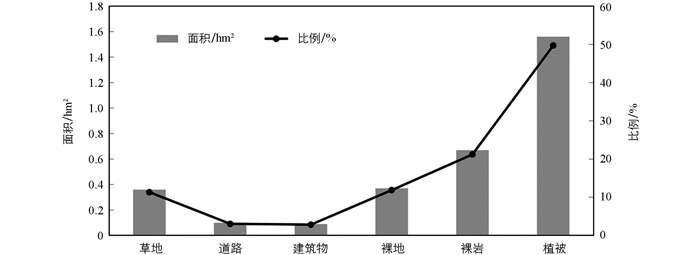
试验区的总面积为3.14 hm2,如图 9所示,基于规则的试验区地物分类结果中,植被面积为1.56 hm2,占比49.71%;草地面积为0.36 hm2,占比11.33%;建筑物面积为0.09 hm2,占比2.84%;道路面积为0.10 hm2,占比3.05%;裸地面积为0.37 hm2,占比11.87%;裸岩面积为0.67 hm2,占比21.2%. 根据表 3石漠化等级划分标准,试验区评价为微度石漠化,即早期石漠化区域.
3.1. 分类结果及精度
3.1.1. 分类结果
3.1.2. 分类精度
3.2. 石漠化程度评价
-
石漠化是指因水土流失而导致地表土壤流失,基岩裸露,土地丧失农业利用价值和生态环境退化的现象. 全面及时地掌握喀斯特地区石漠化的程度及分布是治理石漠化的前提,而小面积破碎化分布的裸岩识别是利用卫星遥感技术开展喀斯特地区石漠化早期调查评价所面临的难题. 本研究以重庆市北碚区槽上地区局部为试验区,基于无人机所获可见光遥感影像,利用面向对象图像分析方法识别提取裸岩,并根据微度裸岩面积占比实现早期石漠化调查评价. 研究结果表明:①利用无人机遥感影像仅有的红、绿、蓝3个波段所计算的植被指数VI能够较好地区分植被与非植被地物对象;②利用光谱特征和形状特征定义的分类规则对无人机遥感影像进行自动地物分类的总体精度为88.6%,Kappa系数为0.86;③试验区所识别提取的裸岩所占面积比例为21.2%,根据石漠化等级划分标准,该试验区石漠化程度评价为微度即早期石漠化.
本研究证明了将无人机可见光影像和面向对象图像分析方法用于早期石漠化调查评价的可行性和有效性,特别是对于小面积破碎化分布的裸岩识别精度较高. 通常来说,喀斯特地区石漠化形成后,如果没有人工干预治理,会逐步经历从微度到轻中度再到重度的演化过程. 随着石漠化程度的加深,其治理的难度和成本都会急剧增加. 因此,本研究提出的针对小而破碎的裸岩识别及早期石漠化调查评价方法对于国内广大喀斯特地区石漠化的早期识别和早期治理具有推广应用价值. 然而,对于轻中度以上的石漠化调查评价,卫星遥感能够覆盖较大的空间范围,这种情况下无人机遥感并不能体现其优势. 不过无人机局部小范围的石漠化调查评价结果可以作为卫星遥感石漠化调查的验证数据,可以弥补人工地面调查验证效率低的不足.