


 下载:
下载:
-
近年来,对时滞系统的分析与设计问题引起了众多学者的广泛关注和深入研究[1-7].众所周知,基于不连续控制的变结构控制理论是处理动力系统鲁棒镇定问题的有效工具[8].传统的变结构控制理论主要针对无时滞的动力系统,而时滞的出现会使得系统变结构控制器设计变得异常复杂,容易使得系统出现高频抖振现象.文献[9]针对具有非线性输入的不确定时滞系统,设计了系统的变结构控制器.文献[10]基于Lyapunov稳定性理论,利用线性矩阵不等式方法得到了不确定时滞系统渐近稳定的充分条件.近年来,出现了若干有关离散时滞系统的变结构控制问题的研究成果[11-13].文献[11]利用线性矩阵不等式方法设计了不确定离散网络控制系统的保成本变结构控制器.文献[12]考虑了具有输入时滞的多输入离散系统的变结构控制设计问题.文献[13]利用变结构控制方法,设计了离散时滞系统的准变结构控制.
然而,上述结果所涉及的时滞系统中的不确定性均满足匹配条件,有关非匹配的不确定性的处理却不多见,尤其是对时滞大系统的变结构控制方面的研究鲜见报道.本文在前人研究的基础上,研究了针对带有非匹配不确定性和时滞的大系统,利用线性矩阵不等式方法得到了滑模面的设计的充分条件,并在此基础上利用极点配置方法设计了使系统状态在有限时间内到达并保持在滑模面上的变结构控制器.
全文HTML
-
考虑下面有N个关联子系统的不确定离散时滞大系统
其中:
$\boldsymbol{x}_{i}(k) \in \mathbb{R}^{n_{i}}$ 是系统状态;$\boldsymbol{u}_{i}(k) \in \mathbb{R}^{m_{i}}$ 是控制输入;正整数hij代表系统时滞,$h = \mathop {\max }\limits_{i,j = 1,2, \cdots ,N} \left\{ {{h_{ij}}} \right\}$ ;ψi(k)是定义在[-h,0]上的初始状态;Ai,Bi和Aij是具有适当维数的常数矩阵;ΔAi(k),ΔAij(k)是代表时变不确定性的未知矩阵.对系统(1)做如下假设:假设 1 Bi是列满秩的.
假设 2 (Ai,Bi)是可控的.
对系统(1),存在非奇异变换
$z_{i}(k)=\boldsymbol{T}_{i} \boldsymbol{x}_{i}(k)(i=1, 2, \cdots, N)$ 使系统(1)等价于其中
由式(2)-(7),得到
由Bi列满秩,易知不确定性ΔAi2,ΔAij2满足匹配条件
其中ΔLi2(k),ΔMij2(k)满足
其中Li2和Mij2是常数.
假设非匹配不确定性ΔAi1(k),ΔAij1(k)满足
其中Di,Ei,Dijd和Eijd是具有适当维数的已知常数矩阵,Ei,Eijd满足
F(k)是未知的时变矩阵函数,满足
对不确定离散时滞大系统(2),选择如下滑模面
其中ci1,ci2具有合适维数.选取ci使得(ciBi)是非奇异的,从而滑模面si(k)是稳定的[12].
到达条件如下[13]
其中S(k)=[s1(k),s2(k),…,sN(k)]T.
-
引理 1[13] 对任意的
$ \mathit{\boldsymbol{x}}, \mathit{\boldsymbol{y}} \in \mathbb{R}^{n}$ 和矩阵函数F(k)满足不等式
成立
定理 1 对不确定离散时滞大系统(1),选取如下控制器,则系统状态在有限时间内到达滑模面
证 由si(k)沿系统(2)的前向差分,易知
其中
由式(9),(10),(11)和(14),并利用引理1,得到
由控制器(12)和式(13),(15)易知
其中ki1,ki2是常数并满足ki1>0,ki2>0(i=1,2,…,N).
-
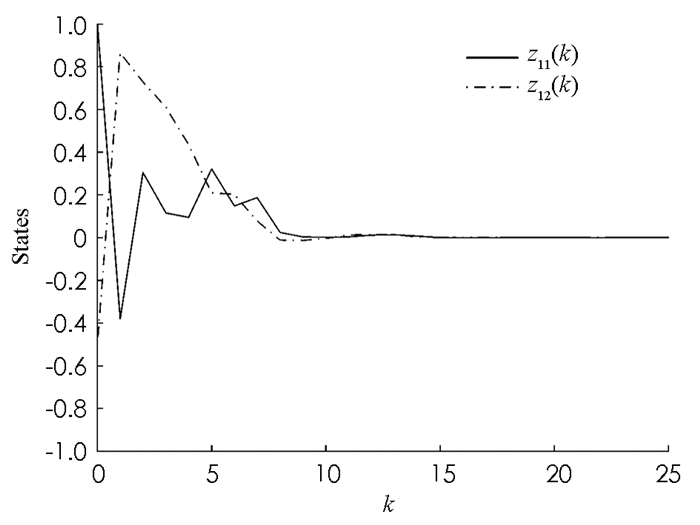
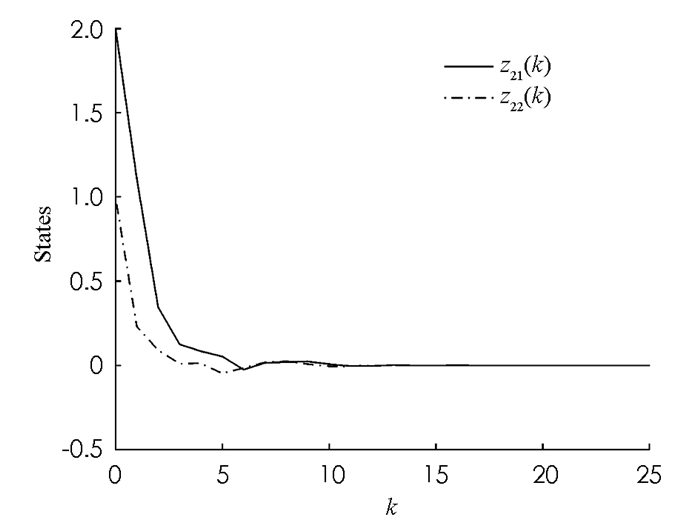
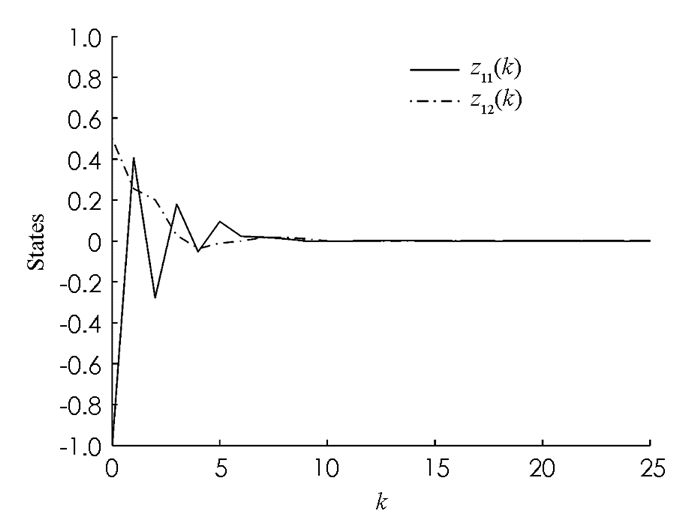
考虑形如式(8)的不确定时滞大系统,其中
时滞和初始条件如下
并有
选取
$c_{1}=\left[\begin{array}{ll}{0} & {1}\end{array}\right], c_{2}=\left[\begin{array}{ll}{0} & {\frac{1}{2}}\end{array}\right], \boldsymbol{c}_{3}=\left[\begin{array}{ll}{0} & {\frac{1}{3}}\end{array}\right]$ ,得到$E_{1 a}=0.4, E_{2 a}=0.09, E_{3 a}=0.1, E_{12 \alpha d}=0$ ,$E_{13 a d}=0.12, E_{21 a d}=0.04, E_{23 a d}=0.15, E_{31 a d}=0.04, E_{32 a d}=0.08$ .
-
本文研究了具有非匹配不确定性的离散时滞大系统的变结构控制问题.设计了系统的变结构控制器,使系统状态在有限时间内到达并保持在滑模面上.与传统变结构控制设计相比,克服了不确定性满足匹配条件的缺点.最后,仿真算例说明了该方法的有效性.