


 下载:
下载:


-
深松是保护性耕作的核心技术之一[1],在旱地保护性耕作技术体系中,土壤深松被定为是一项少耕措施,深松可有效改善土壤结构、打破犁底层、提高土壤中营养成分的利用率,改善作物根系生长环境,进而提高产量[2-6].
无论使用何种耕作设备,都必须考虑土壤的扰动状态,以确保耕作的有效性. 影响土壤扰动行为的因素主要有:触土部件结构、作业条件以及土壤物化性质[5]. Spoor等[7]研究指出,增加翼型深松铲的长度可以明显减小深松比阻,增大土壤扰动系数;夏雷[8]基于离散单元法和土槽试验研究了翼型深松铲的安装高度、入土角等对土壤垄形与表面轮廓的影响;王学振等[2]分析了不同铲翼安装高度对土壤的扰动特性;Hang等[5]研究了凿型深松铲不同铲间距对土壤的扰动行为,其研究结果表明,铲间距为400 mm时对中下层土壤颗粒扰动影响最为明显. 现有大量研究主要在深松铲的几何结构形式、后倾角、工作运行速度以及振动等因素对土壤扰动状态的影响方面,而关于翼型结构深松铲铲间距对土壤的扰动却鲜有报道.
弧形深松铲因其生产方便、破碎能力强,并且在纵深比不大的条件下,弧形铲柄与直线形相比具有优良的耕作性能[9-11],这些优点使其广泛被采用. 基于此,本文以弧形铲柄翼型深松铲为研究对象,采用离散单元法和田间试验,分析不同铲间距对深松土壤扰动行为的影响,希望为研究翼型深松铲不同铲间距对土壤的扰动行为提供一些参考.
全文HTML
-
试验场地选择在原西南大学工程训练中心旁的试验田地,该试验田长15 m,宽6.5 m,并且试验田土质主要为紫色土,该土质是重庆当地占耕作地面积最大的土壤,是全市主要的耕作用土资源.
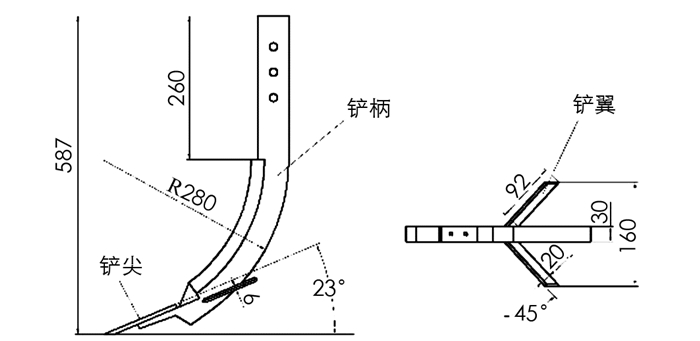
依照JB/T9788—1999的要求选择试验用深松铲具,该铲具由弧状铲柄与凿形铲尖组成,翼铲装配到弧形铲柄上. 如图 1所示.
-
试验前对试验田进行了简单处理,清除了草根、石块等土壤杂物并进行了平整处理,按相关要求完成对试验田土壤基本参数的测量,结果汇于表 1.
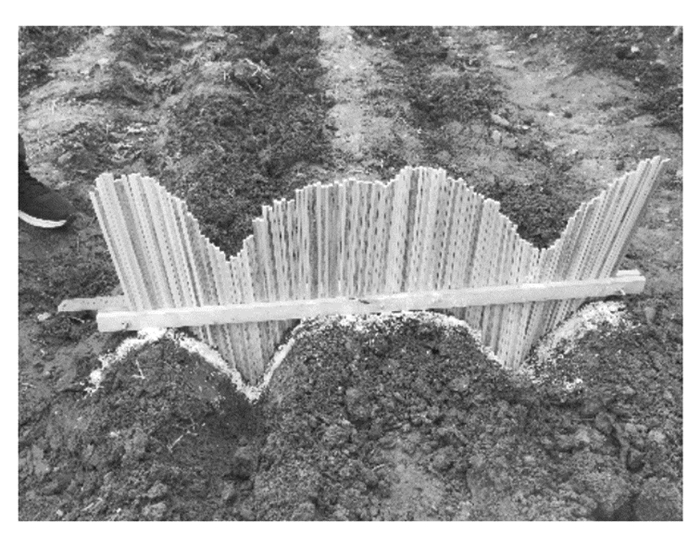
土壤参数测量完成后依次使用5种不同铲间距(350,400,450,500,550 mm)的深松铲机具(图 2)进行深松试验,试验选择的牵引动力为国产东方红LX2004拖拉机. 根据重庆市农用耕作土壤深松作业习惯要求,选定翼铲运动速度0.83 m/s,作业深度300 mm. 试验结束后,利用自制简易土壤截面轮廓测量仪器(图 3)等设备分别测量不同铲间距深松后的土壤轮廓线,为保证测量结果的准确性,每种铲间距作用下的土壤轮廓分3个不同位置测量,间距1.5 m,并记录不同翼铲铲间距深松后的土壤数据.
1.1. 试验场地及材料
1.2. 试验过程
-
本文采用离散元法进行仿真试验,结合重庆丘陵山区土壤土质及物理化学性质,在EDEM软件中建立土槽模型,把已创建的翼铲几何模型输入,待一切准备工作完成后开始模拟土槽试验,待完成后将结果导出并对其分析.
-
为了确保仿真分析的准确性,按照1∶1的比例采用CREO3.0制图软件建立仿真用翼型深松铲的三维结构模型,并保存为.igs格式文件.
-
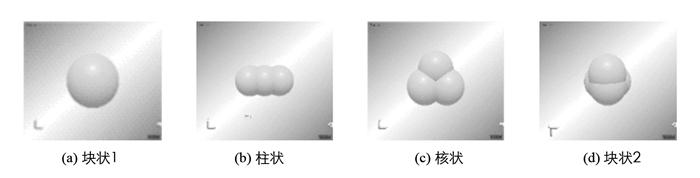
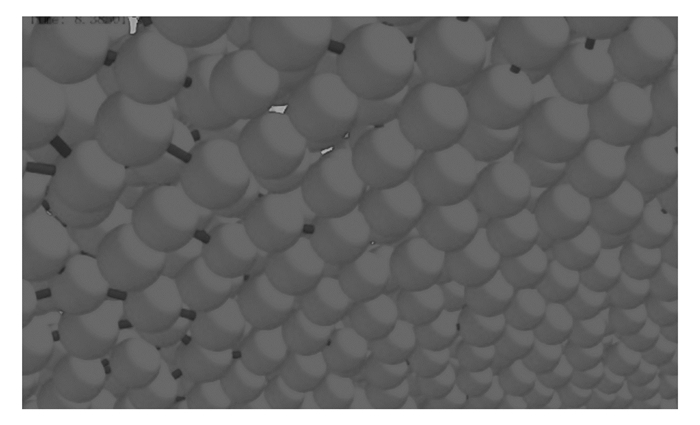
为使EDEM仿真试验可靠,需要创建较为精确的虚拟土壤模型. 查阅相关资料了解到土壤颗粒主要分为块状、核状以及柱状[12],用EDEM软件中自带颗粒(直径3 mm)为基本结构单元,创建块状、核状与柱状土壤颗粒模型,如图 4所示. 考虑到重庆丘陵山地的紫色土壤类型,利用EDEM2.7中的Hertz-Mindlin with Bonding模型创建土壤颗粒间的接触模型[2],这种模型使颗粒间具有类似田间实际土壤液桥力的粘结键(图 5),能承受一定大小的力和力矩[2].
-
选用的土壤接触模型主要参数包括土壤与土壤、土壤与翼铲间的恢复以及动静摩擦系数,其中土壤与土壤、土壤与铲间的恢复、动静摩擦系数主要参考文献[13-14]中的数据. 离散单元法试验模型主要参数数据如表 2.
-
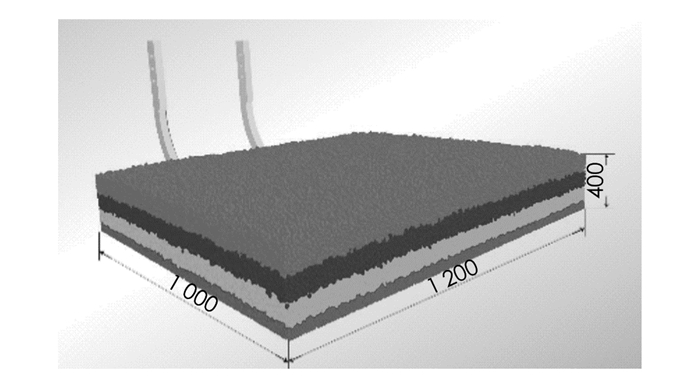
为了确保仿真与田间试验的一致性,依据耕作深度和翼铲铲间距以及宽度在EDEM中创建尺寸(长×宽×高)为1 000 mm×1 200 mm×400 mm的土槽模型,如图 6所示. 仿真参数设定完成后,通过EDEM软件中颗粒工厂动态生成土壤颗粒,颗粒生成完成后进行沉降、粘结以形成颗粒间的粘结键. 现实土壤颗粒中,每种类型的土壤颗粒大小并非完全相同,为了使仿真土壤与现实土壤更接近,设置每种土壤颗粒大小呈正态分布. 然后依次将不同铲间距(350,400,450,500,550 mm)的翼型深松铲3D模型导入EDEM软件中,设定耕深为300 mm. 开始前,使深松铲位于模拟土槽的一端,以预设的速度运动,仿真结束后,保存不同铲间距的试验数据.
-
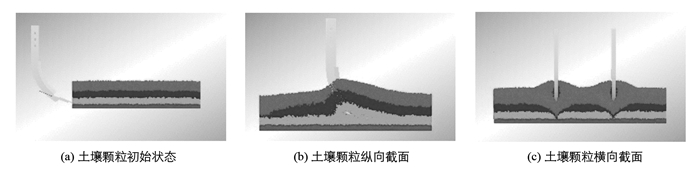
为便于了解不同结构土壤颗粒深松过程中的扰动规律,模拟土槽由4层结构组成,从上到下依次为表层、中层、下层以及底层,并在不同土层设置特定的土壤颗粒,从上至下的土壤颗粒类型依次为块状2颗粒、核状颗粒、柱状颗粒、块状1颗粒[12],如图 6所示. 为便于分析翼铲对4个层次土壤作用情况,使用EDEM软件中的切片功能对土槽沿纵向、横向剖视,如图 7所示.
2.1. 试验方法
2.2. 深松铲建模
2.3. 土壤颗粒和土壤接触模型
2.4. 土壤模型参数
2.5. EDEM建模
2.6. 仿真土壤分布状态
-
为便于分析4种层次结构土壤颗粒随翼铲深松过程的扰动,以模拟土槽的纵横向剖面图对不同层次土壤颗粒的扰动行为进行研究分析. 为研究深松铲位于不同位置时的土壤扰动状态,以400 mm铲间距为例进行分析,如图 8所示,由图中可以看出,8.7 s时翼铲铲尖已完整地接触模拟土槽,8.9 s时翼铲已完全接触模拟土槽,9.1 s与9.3 s时翼铲处于土壤深松过程的中段.
从图 8看出,在深松的整个阶段,表层土壤扰动的范围都是最大,中间层以及下层居中,底层最小. 当翼铲铲尖进入土壤颗粒时(8.7 s),底层土壤颗粒受到来自铲尖的作用力从而向上隆起,并对其他层产生挤压,使中上层土壤产生位移,从而在地表产生隆起变形. 随着深松过程的进行,下层、中层、表层土壤向上位移量不断增加,地表隆起变形更加显著.
当翼铲完整进入土壤模型时(8.9 s),在翼铲的作用下,部分表层土壤沿耕作方向发生位移,使表层土壤的纵向扰动范围增加;此外,在铲翼与铲柄刃口的剪切、导流作用下,表层、中层、下层及底层土壤向深松铲两侧移动,表层土壤的横向扰动显著.
随着深松过程的进行(9.1 s与9.3 s),由于土壤受到深松铲的剪切、挤压等作用力影响,导致土壤颗粒间黏结力失效,颗粒发生相对位移,形成中间凹陷两侧隆起的表面垄形,表层的土壤颗粒由于自身重力的作用相对翼铲向后下方移动,最终回填至深松后的垄沟.
-
常常用膨松度以及扰动系数来作为评价土壤颗粒扰动效果的指标[15]. 土壤膨松度与扰动系数的公式如下
式中p—土壤膨松度,%
Aq,Ah—耕作前后地表面至理论沟底的横断面积,mm2
y—土壤扰动系数,%
As—耕作前地表面至实际深松后沟底的横断面积,mm2
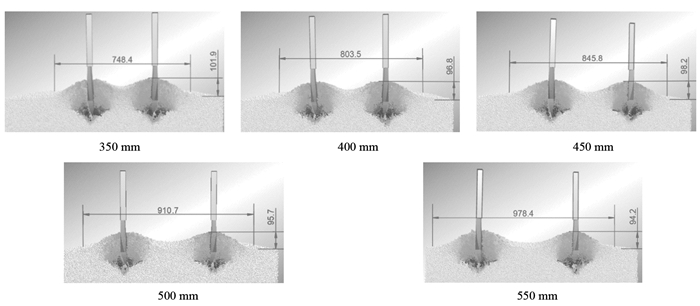
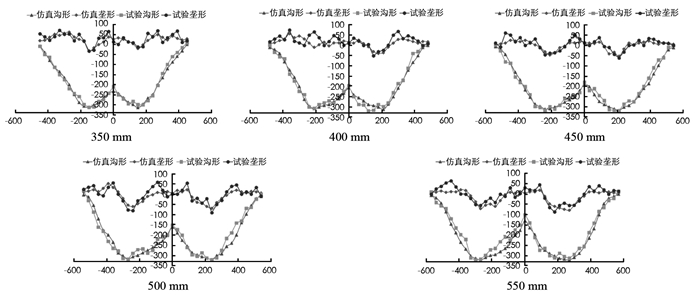
为了研究分析翼铲铲间距对土壤颗粒扰动行为的影响,试验得到了不同铲间距深松下的土壤颗粒扰动范围以及扰动规律(如图 9、图 10所示). 图 9显示了在不同铲间距深松下由两个翼型深松铲扰动的土壤横截面,在土壤表面测量土壤横向扰动宽度,并将其定义为两个深松铲扰动土壤的距离,垄高是从原始土壤表面到土垄顶部的垂直距离. 当铲间距为350,400,450,500,550 mm时,两深松铲的土壤扰动宽度仿真值分别为748.4,803.5,845.8,910.7,978.4 mm,垄高仿真值分别为101.9,96.8,98.2,95.7,94.2 mm. 仿真试验结果表明,铲间距越大,土壤横向扰动宽度就越大,垄高反映了土壤在地表的累积量,由于铲间距越小,两铲间土壤相互作用越大[3],即铲间距越小,地表累积量越大,这也解释了在最小铲间距(350 mm)处观测到最大垄高. 以上信息有助于选择合适的翼铲铲间距以获得最优的深松效果. 由图 10可知,当铲间距为350,400,450,500,550 mm时,铲间未扰动土高度分别为-233.4,-208.1,-184.6,-161.5,-130.7 mm,即随着翼型深松铲铲间距的逐渐增大,两铲之间未扰动土高度逐渐增大.
按式(1)、式(2)分别计算出5个不同铲间距深松后的土壤膨松度、土壤扰动系数及其相对误差,将其计算结果汇总于表 3中. 从表 3可知,铲间距越大,土壤膨松度越小,而扰动系数则是先降低后略微升高. 5种间距下土壤膨松度以及扰动系数的EDEM仿真值和田间试验值的相对平均误差为11.2%和13.5%,结果说明该土壤结构模型能够较好地模拟土壤颗粒深松中扰动情况.
3.1. 土壤扰动状态分析
3.2. 土壤扰动效果分析
-
本文采用EDEM建立了土壤深松模型并结合室外田间试验,研究分析了翼型深松铲不同铲间距对土壤扰动行为的影响,得出如下结论:
1) 土壤深松各个阶段,表层土壤颗粒扰动量都是最大的,中层及下层居中,底层最小.
2) 随着翼型深松铲铲间距的增大,土壤横向扰动宽度增大,两铲之间未扰动土高度也增大,铲间距越大,土壤膨松度越小,而扰动系数则先降低后略微升高.
3) 离散单元法能够较为准确地模拟土壤深松作业过程中的扰动行为,离散单元法仿真与田间试验获得的土壤扰动数据大致相同,5种铲间距下土壤膨松度以及扰动系数的EDEM仿真值和田间试验值的平均误差为11.2%和13.5%.