


 下载:
下载:
-
近年来Allee效应[1]受到了国内外生态学家和数学家的极大关注,但大多数研究的是带有乘法Allee效应的模型[2-4].
文献[5]构造了如下的加法Allee效应:
其中:
$\vartheta $ 是种群密度,r表示$\vartheta $ 的内在增长率,K为$\vartheta $ 的环境承载力,m与b为Allee效应常量,反映了该效应的强弱程度.当m < br时,此方程代表弱Allee效应; 当m>br时,此方程代表了强Allee效应.大量事实表明,在弱Allee效应的影响下,食饵的单位增长率虽会降到很低但仍能保持为正.本文主要研究如下带有加法Allee效应的捕食-食饵模型
其中:Ω 为
$ {{\mathbb{R}}^{N}}(N\ge 1)$ 中具有光滑边界$ \partial \varOmega $ 的有界开区域; u和v分别表示食饵和捕食者的密度; 参数a,r,K,d,d1,d2,m,b,c,α,β,e,k均为正常数且m < ab,a和r分别表示食饵和捕食者的出生率,K表示环境对食饵的容纳量,d表示捕食者的种内压力,d1和d2分别是食饵和捕食者的扩散系数;$ \frac{m}{u+b}$ 是加法Allee效应项,m和b是Allee效应常量,反应了Allee效应的强弱程度;$\frac{c u}{(1+\alpha u)(1+\beta v)} $ 是Crowley-Martin功能反应函数,与Beddington-DeAngelis反应函数相比,它更具有优越性,且与现实中的某些生物现象更加契合;$ \frac{e v}{k+u}$ 为修正的Leslie-Gower项,e表示食饵的转化率,k为环境对捕食者的承载量.当α=β=d=0时,文献[6]在齐次Neumann边界条件下讨论了系统正常数解的稳定性及非常数正解的存在性和不存在性; 当m=β=d=0时,文献[7]利用分歧理论研究了该系统正解的存在性、稳定性、多解性和唯一性; 文献[8]在齐次Neumann边界条件下利用度理论研究了该系统非常数正解的存在性和不存在性; 当m=d=0时,文献[9]利用扰动理论、分歧理论以及度理论讨论了系统正解的存在性、稳定性、唯一性和多解性.然而,对齐次Dirichlet边界条件下带有Allee效应的捕食-食饵模型的研究极少,原因在于在齐次Dirichlet边界条件下研究系统的半平凡解问题比较困难.因此,本文主要讨论系统(1)正解的存在性和稳定性.
本文主要考虑系统(1)对应的平衡态系统
为了方便研究,作如下变换:
并将
$ \bar{u}, \bar{a}, \bar{m}, \bar{b}, \bar{c}, \bar{\alpha}, \bar{\beta}, \bar{v}, \bar{r}, \bar{e}, \bar{k}$ 分别记为$u, a, m, b, c, \alpha, \beta, v, r, e, k $ ,则系统(2)转化为本文主要利用分歧理论和稳定性理论研究系统(3)共存解的存在性和稳定性.
全文HTML
-
本节主要介绍一些基本的概念和结论,为后面的研究作准备.
设
$ q(x) \in C(\bar{\varOmega})$ ,考虑如下特征值问题根据文献[10-11]可知,问题(4)的所有特征值满足
$\lambda_{1}(q) <\lambda_{2}(q) \leqslant \lambda_{3}(q) \leqslant \cdots \rightarrow \infty $ ,相应的特征函数为φ1,φ2,φ3…,其主特征值是单重的.对j≥1,若q1≥q2,则λj(q1)≥λj(q2),且若
$ q_{1} \not \equiv q_{2}$ ,则λj(q1)>λj(q2).记λ1(0)=λ1,相应的主特征函数记作φ1(φ1>0,x∈Ω).考察非线性边值问题
根据文献[12]知,如果r>λ1,则方程(5)有唯一正解,记为θr,且0 < θr < r.对于r∈(λ1,+∞),映射
$r \longrightarrow \theta_{r} $ 是连续的,且若r1 < r2,则θr1 < θr2.因此对于边值问题当r>λ1时,问题(6)有唯一正解
$ \frac{k}{k+e} \theta_{r}$ ,记为θr*.考虑非线性边值问题
由文献[13]知,当m < min{b2,ab}且
$a>\lambda_{1}+\frac{m}{b} $ 时,问题(7)存在唯一正解,记为θa*.根据以上对于问题(6),(7)的讨论知:如果m < min{b2,ab}且
$a>\lambda_{1}+\frac{m}{b} $ ,那么系统(3)存在半平凡解(θa*,0);如果r>λ1,那么系统(3)存在半平凡解(0,θr*).下面给出系统(3)正解存在的必要性条件.
引理1 设m < min{b2,ab}.如果(u,v)是系统(3)的正解,则
$a>\lambda_{1}+\frac{m}{b}, r>\lambda_{1} $ .证 在系统(3)中关于u的方程两端同乘u,并在Ω上积分得
由Poincaré不等式得
$ a-\frac{m}{b}>\lambda_{1}$ ,即$a>\lambda_{1}+\frac{m}{b} $ .同理可证r>λ1.利用上下解方法和极大值原理易得系统(3)正解的先验估计,即下面的引理2.
引理2 设m < min{b2,ab}.如果(u,v)是系统(3)的正解,则
在本节最后,我们给出下面的引理.
引理3 设L0是问题(6)在θr*处的线性化算子,即
$ L_{0}=-\Delta-r+2\left(1+\frac{e}{k}\right) \theta_{r}^{*}$ .如果r>λ1,那么L0的所有特征值均大于0.证 由r>λ1知,θr*是
$-\Delta v=v\left(r-v-\frac{e}{k} v\right) $ 的唯一正解,于是$ \lambda_{1}\left(-\Delta-r+\left(1+\frac{e}{k}\right) \theta_{r}^{*}\right)=0$ ,从而$\lambda_{1}\left(-\Delta-r+2\left(1+\frac{e}{k}\right) \theta_{r}^{*}\right)>\lambda_{1}\left(-\Delta-r+\left(1+\frac{e}{k}\right) \theta_{r}^{*}\right)=0 $ .因此,L0的所有特征值均大于0.
-
本节分别以a和r为分歧参数,研究系统(3)发自半平凡解的分歧解.
先以a为分歧参数,讨论系统(3)发自半平凡分支
$\left\{\left(a ; 0, \theta_{r}^{*}\right): a \in \mathbb{R}^{+}\right\} $ 的局部分支.为了应用分歧理论,引入空间其中
$C_{0}^{1}(\bar{\varOmega})=\left\{u \in C^{1}(\bar{\varOmega}): u=0, x \in \partial \varOmega\right\} $ .设
${\tilde{a}} $ 是边值问题的主特征值,ϕ1>0为相应的特征函数.
定理1 设r>λ1,则
$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 是系统(3)的分歧点,且在$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 的邻域内,系统(3)存在正解,其中${\tilde{a}} $ 由(8)式给出.证 定义算子
$A: \mathbb{R}^{+} \times X \longrightarrow X $ 为则A(a; u,v)为X上的可微算子.令
$L\left(\tilde{a} ; 0, \theta_{r}^{*}\right)=D A_{(u, v)}\left(\tilde{a} ; 0, \theta_{r}^{*}\right) $ ,则因此
$L\left(\tilde{a} ; 0, \theta_{r}^{*}\right)(\xi, \eta)=0 $ 等价于若ξ≡0,则η≡0,故ξ
$ \equiv$ 0,从而由前面$w_{3, 2}^{1} $ 的定义知,ξ=ϕ1.由引理3知,L0的所有特征值均大于0,所以$\eta=\psi_{1}=L_{0}^{-1}\left(\frac{e\left(\theta_{r}^{*}\right)^{2}}{k^{2}} \phi_{1}\right) $ ,其中L0-1是算子L0的逆算子.利用最大值原理可知,ψ1>0.因此$L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 的核空间$ N\left(L\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right)=\operatorname{span}\left\{\left(\phi_{1}, \psi_{1}\right)\right\}$ .令
$L^{*}\left(\tilde{a} ; 0, \theta_{r}^{*}\right) $ 为$L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 的伴随算子,则于是
$L^{*}\left(\tilde{a} ; 0, \theta_{r}^{*}\right) $ (ξ,η)=0等价于显然,η=0,ξ=ϕ1,从而
$N\left(L^{*}\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right)=\operatorname{span}\left\{\left(\phi_{1}, 0\right)\right\} $ .由Fredholm选择定理可知,$L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 的值域$ R\left(L\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right)=\left\{(\xi, \eta) \in X: \int_{\varOmega} \xi \phi_{1} \mathrm{~d} x=0\right\}$ .因此codim R($L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ )=1.令
$ L_{1}\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\left(\phi_{1}, \psi_{1}\right)=D_{a(u, v)}^{2} A\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\left(\phi_{1}, \psi_{1}\right)$ ,则$L_{1}\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\left(\phi_{1}, \psi_{1}\right)=\left(\phi_{1}, 0\right) \notin R(L(\tilde{a} ; \left.\left.0, \theta_{r}^{*}\right)\right)$ .因此,根据Crandall-Rabinowitz分歧定理[14]知,存在充分小的δ>0和C1函数
$ ( a ( s ) ; \phi(s), \psi(s)): (-\delta, \delta) \longrightarrow \mathbb{R} \times X$ ,使得$a(0)=\tilde{a}, \phi(0)=0, \psi(0)=0 $ ,且$ \phi(s), \psi(s) \in Z$ ,这里$ X=Z \oplus N\left(L\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right)$ .因此,$ ( a ( s ) ; u(s), v(s))(|s| <\delta)$ 是系统(3)的解分支,其中$ u(s)=s\left(\phi_{1}+\phi(s)\right), v(s)=\theta_{r}^{*}+s\left(\psi_{1}+\right.$ $\psi(s)) $ .如果取0 < s < δ,则它恰是系统(3)的正解,即分支$( a ( s ) ; u(s), v(s))(0 <s <\delta) $ 是系统(3)的共存解,且系统(3)在分歧点$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 附近的非负非平凡解,或者在分支$\left\{\left(a ; 0, \theta_{r}^{*}\right): a \in \mathbb{R}^{+}\right\} $ 上,或者在分支$ \{( a ( s ) ; u(s), v(s)): 0 <s <\delta\}$ 上.下面以r为分歧参数,考察系统(3)发自半平凡解(θa*,0)的局部分歧.类似定理1的证明过程能证明下面的定理2成立.
定理2 设m < min{b2,ab}且
$ a>\lambda_{1}+\frac{m}{b}$ ,则$ \left(\tilde{r} ; \theta_{a}^{*}, 0\right)$ 是系统(3)的分歧点,且在$ \left(\tilde{r} ; \theta_{a}^{*}, 0\right)$ 的邻域内,系统(3)存在正解,其中$\tilde{r}=\lambda_{1} $ ,相应的特征函数为φ1.引理4 设
$ m <\min \left\{b^{2}, a b\right\}, \lambda_{1}+\frac{m}{b} <a <\lambda_{1}+\frac{m}{b}+\frac{c}{\beta}$ .若(u,v)是系统(3)的一个正解,则存在充分大的常数M>0,使得$ \tilde{r} <r \leqslant M$ .证 由系统(3)中关于v的方程可得
下面利用反证法证明r≤M.假设r>M.令
$q_{r}=\frac{c \theta_{r}^{*}}{\left(1+\alpha \theta_{a}^{*}\right)\left(1+\beta \theta_{r}^{*}\right)}+\frac{m}{b} $ .因为λ1(qr)是关于r的单调递增函数,$\lim\limits_{r \rightarrow+\infty} \lambda_{1}\left(q_{r}\right)=\lambda_{1}+\frac{m}{b}+\frac{c}{\beta} $ ,且M充分大,所以当r>M时,a < λ1(qr).另一方面,由r>λ1易得v≥θr*.考虑到m < b2,有$ u+\frac{m}{u+b}+\frac{c v}{(1+\alpha u)(1+\beta v)}>\frac{c \theta_{r}^{*}}{\left(1+\alpha \theta_{a}^{*}\right)\left(1+\beta \theta_{r}^{*}\right)}+\frac{m}{b}$ .于是,根据系统(3)中关于u的方程可得,矛盾.因此r≤M.
注1 由引理4可知,在半平凡解分支{(r; θa*,0)}上产生的局部分歧解一定在分歧点
$ \left(\tilde{r} ; \theta_{a}^{*}, 0\right)$ 的右侧.同时也可以知道,如果该分歧解能延拓为整体分歧,则该整体分歧是不可能随参数r到达无穷远处的.
-
本节主要利用全局分歧理论[15-17],把定理1和定理2给出的局部分歧分别延拓为全局分歧.为了研究方便,引入以下记号:
定理3 设r>λ1,则由定理1给出的正分歧解在P内沿a增大到∞.
证 令
$ \omega=u, \chi=v-\theta_{r}^{*}$ .若(u,v)是系统(3)的非负解,则$0 \leqslant \omega <a, \chi \geqslant 0 $ ,且ω,χ满足其中
显然F=(F1,F2)连续,F(0,0)=0,且F关于(ω,χ)的Fréchet导数
$\left.D_{(\omega, \chi)} F\right|_{(0, 0)}=0 $ .令K为(-Δ)-1,则(9)式等价于定义算子
$ T: \mathbb{R}^{+} \times X \longrightarrow X$ 为那么
$ T(a ; \omega, \chi)$ 为X上的紧可微算子.令$ G(a ; \omega, \chi)=(\omega, \chi)-T(a ; \omega, \chi)$ ,则G是C1函数,并且$G(a ; \omega, \chi) $ =0.易知,$G(a ; \omega, \chi) $ 满足$0 \leqslant \omega <a, \chi \geqslant 0 $ 的零点恰好是系统(3)的非负解.令
则
$ I-K(\tilde{a})$ 的伴随算子因此
$ \left(I-K^{*}(\tilde{a})\right)(\omega, \chi)=0$ 等价于令
$\omega=-\Delta \tilde{\omega}, \chi=-\Delta \tilde{\chi} $ .则(11)式等价于显然,若
$ \tilde{\chi} \equiv 0$ ,则$ \tilde{\omega}=\phi_{1}$ ,从而$N\left(I-K^{*}(\tilde{a})\right)=\operatorname{span}\left\{\left(-\Delta \phi_{1}, 0\right)\right\} $ .设μ≥1是K(a)的一个特征值,相应的特征函数为(ω,χ),则有
$K(a)(\omega, \chi)=\mu(\omega, \chi) $ ,即如果ω≡0,那么χ≡0,矛盾.因此ω
$ \equiv$ 0,于是存在某个i(i=1,2,…),使得a=ai(μ),其中ai(μ)是问题的特征值.对于任意的i,ai(μ)关于μ≥1严格单调递增,且满足
另一方面,若μ≥1,则Lμ的所有特征值都是正的,其中
$ L_{\mu}=-\mu \Delta-r+2\left(1+\frac{e}{k}\right) \theta_{r}^{*}$ ,从而χ=$L_{\mu}^{-1}\left(\frac{e\left(\theta_{r}^{*}\right)^{2}}{k^{2}} \omega\right) $ 且(ω,χ)是K(a)的一个特征函数.因此,μ≥1是K(a)的特征值当且仅当存在某个i=1,2,…,使得a=ai(μ).假设
$ a < \tilde a$ ,则对任意的μ≥1,i≥1,都有a < a1(1)≤ ai(μ).因此,K(a)没有大于或等于1的特征值,从而index(T(a,·),0)=1.假设
$ \tilde{a} <a <a_{2}(1)$ ,则对任意的μ≥1,i≥2,有a < ai(μ).又因为$a_{1}(1)=\tilde{a}, \lim\limits _{p \rightarrow \infty} a_{1}(\mu)=+\infty $ ,且a1(μ)关于μ≥1严格递增,因此存在唯一的μ1,使得a=a1(μ1).于是N(μ1I-K(a))=span{(ω1,χ1)},dim(N(μ1I-K(a)))=1,其中ω1>0是问题的主特征函数,
$\chi_{1}=L_{\mu_{1}}^{-1}\left(\frac{e\left(\theta_{r}^{*}\right)^{2}}{k^{2}} \omega_{1}\right) $ .下证
$N\left(\mu_{1} I-K(a)\right) \cap R\left(\mu_{1} I-K(a)\right)=\{0\} $ .事实上,如果假设不成立,设(ω1,χ1)∈R(μ1I-K(a)),则存在(ω,χ)∈X,使得(μ1I-K(a))(ω,χ)=(ω1,χ1),即在方程(13)两端同乘ω1,再在Ω上积分,并利用格林公式得
另一方面,结合(12)式可得
$\int_{\varOmega}-\omega_{1} \Delta \omega_{1} \mathrm{~d} x=\frac{1}{\mu_{1}} \int_{\varOmega}\left(a-\frac{m}{b}-\frac{c \theta_{r}^{*}}{1+\beta \theta_{r}^{*}}\right) \omega_{1}^{2} \mathrm{~d} x=0 $ ,矛盾.因此μ1的代数重数是1.所以当$\tilde{a} <a <a_{2}(1) $ 时,$ \text { index }(T(a, \cdot), 0)=-1$ .根据全局分歧定理[15]可知,在
$ \mathbb{R}^{+} \times X$ 内,存在发自($\mathbb{R}^{+} \times X $ ; 0,0)的连通分支C0满足$G(a ; \omega, \chi) $ =0,且在点($\mathbb{R}^{+} \times X $ ; 0,0)附近,$G(a ; \omega, \chi) $ 的所有零点都在定理1给出的分歧曲线$ \left\{\left( a ( s ) ; s\left(\phi_{1}+\phi(s)\right), s\left(\psi_{1}+\right.\right.\right.$ $ \psi(s))):|s| <\delta\}$ 上.定义$C_{1}=C_{0}-\left\{\left( a ( s ) ; s\left(\phi_{1}+\phi(s)\right), s\left(\psi_{1}+\psi(s)\right)\right):-\delta <s <0\right\} $ 为最大连通分支,则在分歧点($\mathbb{R}^{+} \times X $ ; 0,0)附近,C1满足曲线$\left\{\left( a ( s ) ; s\left(\phi_{1}+\phi(s)\right), s\left(\psi_{1}+\psi(s)\right)\right): 0 <s <\delta\right\} $ .令C={(a; u,$ \left.v): u=\omega, v=\theta_{r}^{*}+\chi, (a ; \omega, \chi) \in C_{1}\right\}$ ,则C为系统(3)发自$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 的解分支,且在$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 的小邻域内有$C \subset P $ .基于Rabinowitz给出的全局分歧定理[15]和文献[16-17]的研究,易知分支C-{
$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ }满足下列条件之一:(ⅰ) C连接了分歧点
$ \left( {\mathop a\limits^ \wedge ;0, \theta _r^*} \right)$ 和$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ ,其$\mathop a\limits^ \wedge \ne \tilde a $ 且${I - K(\mathop a\limits^ \wedge )} $ 不可逆;(ⅱ) C在
$\mathbb{R}^{+} \times X $ 内从点$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 延伸到∞;(ⅲ) C包含了一个点
$(a ; u, v) \in \mathbb{R}^{+} \times(\bar{Z} \backslash\{0\}) $ ,其中$ \bar{Z}$ 是$ N\left( {I - {K^*}(\tilde a)} \right)$ 的补空间.下面证明
$ C-\left\{\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right\} \subset P$ .利用反证法,假设$ C - \left\{ {\left( {\tilde a;0, \theta _r^*} \right)} \right\} \not\subset P$ ,则存在点$(\mathop a\limits^ \wedge ;\mathop u\limits^ \wedge , \mathop v\limits^ \wedge ) \in \{ C - \left. {\left( {\tilde a;0, \theta _r^*} \right)} \right\} \cap \partial P $ 以及序列$\left\{ {\left( {{a_n};{u_n}, {v_n}} \right)} \right\} \subset C \cap P $ ,这里$ {u_n}, {v_n} > 0$ ,使得当$ n \to \infty $ 时,$\left( {{a_n};{u_n}, {v_n}} \right) \to (\mathop a\limits^ \wedge ;\mathop u\limits^ \wedge , \mathop v\limits^ \wedge ) $ .由于$ (\mathop a\limits^ \wedge ;\mathop u\limits^ \wedge , \mathop v\limits^ \wedge ) \in \partial P$ ,故$ \hat u \in \partial {P_1}$ 或$\mathop u\limits^ \wedge \in \partial {P_1} $ .假设$\mathop u\limits^ \wedge \in \partial {P_1} $ ,则$ \mathop u\limits^ \wedge \ge 0, x \in \bar \varOmega $ ,从而或者存在x0∈Ω,使得$ \hat{u}\left(x_{0}\right)=0, \text { 或者存在 } x_{0} \in \partial \varOmega, \text { 使得 }\left.\frac{\partial u}{\partial n}\right|_{x=x_{0}}=0$ ,或者存在x0∈$ \partial \varOmega $ ,使得${\rm{ }}{x_0} \in \partial \varOmega $ .由系统(3)的第一个方程知,$\mathop u\limits^ \wedge $ 满足方程故由极大值原理知
$\mathop u\limits^ \wedge \tilde{\chi} \equiv 0$ .同理,假设$\mathop u\limits^ \wedge \in \partial {P_1} $ ,则$\mathop v\limits^ \wedge \tilde{\chi} \equiv 0$ .因此,($ \mathop u\limits^ \wedge , \mathop v\limits^ \wedge $ )有以下3种可能的情况:1) 假设
$ (\mathop u\limits^ \wedge , \mathop v\limits^ \wedge ) = \left( {0, \theta _r^*} \right)$ ,则当$ n \to \infty $ 时,$ \left( {{a_n};{u_n}, {v_n}} \right) \to \left( {\mathop a\limits^ \wedge ;0, \theta _r^*} \right)$ .令$ {U_n} = \frac{{{u_n}}}{{{{\left\| {{u_n}} \right\|}_\infty }}}$ ,则Un满足由Lp估计和Sobolev嵌入定理知,存在Un的一个收敛子列(不失一般性,仍记为Un),使得当
$ n \to \infty $ 时,$ U_{n} \rightarrow U $ 在$C_{0}^{1}(\bar{\varOmega}) $ 上成立,且$ U \geqslant 0(U \neq 0), x \in \bar{\varOmega}$ .在(14)式中,令$ n \to \infty $ 得由极大值原理知U>0,x∈Ω.因此
$ \mathop a\limits^ \wedge = \tilde a$ ,这与$\mathop a\limits^ \wedge \ne \tilde a $ 矛盾.2) 假设
$(\mathop u\limits^ \wedge , \mathop v\limits^ \wedge ) = \left( {\theta _a^{ \wedge *}, 0} \right) $ ,则当$ n \to \infty $ 时,$\left( {{a_n};{u_n}, {v_n}} \right) \to \left( {\mathop a\limits^ \wedge ;\theta _a^{ \wedge *}, 0} \right) $ .令$ {V_n} = \frac{{{v_n}}}{{{{\left\| {{v_n}} \right\|}_\infty }}}$ ,则Vn满足类似地,依据Lp估计和Sobolev嵌入定理知,Vn存在一个收敛子列(不失一般性,仍记为Vn),使得当
$ n \to \infty $ 时,$ V_{n} \rightarrow V$ 在$ C_{0}^{1}(\bar{\varOmega})$ 上成立,且$ V \geqslant 0(V \neq 0), x \in \bar{\varOmega} $ .在(15)式中,令$ n \to \infty $ 得由极大值原理知V>0,x∈Ω.因此r=λ1,与r>λ1矛盾.
3) 假设(
$ \mathop u\limits^ \wedge , \mathop v\limits^ \wedge $ )=(0,0),类似于上面的方法,同样得出矛盾.因此,
$ C-\left\{\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right\} \subset P$ .由此得出(ⅰ)不成立.另一方面,不妨取(ⅲ)中$\bar{Z}=R(I-K(\tilde{a}))= $ $ \left(N\left(I-K^{*}(\tilde{a})\right)\right)^{\perp}=\left\{(\omega, \chi) \in X: \int_{\varOmega}-\omega \Delta \phi_{1} \mathrm{~d} x=0\right\}$ ,其中$ N\left(I-K^{*}(\tilde{a})\right)=\operatorname{span}\left\{\left(-\Delta \phi_{1}, 0\right)\right\}$ .若C包含一个点$(a ; u, v) \in \mathbb{R}^{+} \times(\bar{Z} \backslash\{0\}) $ ,则有$\int_{\varOmega}-u \Delta \phi_{1} \mathrm{~d} x=0 $ ,这与$ \int_{\varOmega} s\left(\phi_{1}+\phi(s)\right)\left(\tilde{a}-\frac{m}{b}-\frac{c \theta_{r}^{*}}{1+\beta_{r}^{*}}\right) \phi_{1} \mathrm{~d} x \neq 0(s>0)$ 矛盾.因此(ⅲ)也不成立.由引理2,Lp估计和Sobolev嵌入定理知,存在常数M′>0,使得‖u‖,‖v‖≤ M′.所以C在正锥P内只能沿参数a延伸到∞.类似地,定理2给出的局部分歧也可以延拓为全局分歧,下面主要对全局分歧的具体走向作一下说明.
定理4 设
$m <\min \left\{b^{2}, a b\right\}, \lambda_{1}+\frac{m}{b} <a <\lambda_{1}+\frac{m}{b}+\frac{c}{\beta} $ ,则由定理2给出的正分歧解与半平凡分支$H_{1}=\left\{\left(r ; 0, \theta_{r}^{*}\right)\right\} $ 相连接.证 令H为系统(3)由
$ \left(\tilde{r} ; \theta_{a}^{*}, 0\right)$ 出发的解曲线,且在$ \left(\tilde{r} ; \theta_{a}^{*}, 0\right)$ 的小邻域内$ H \subset P$ .因此根据全局分歧定理[15]和文献[16-17]的研究知,分支$\left.H-\left\{\tilde{r} ; \theta_{a}^{*}, 0\right)\right\} $ 满足下列条件之一:(ⅰ) H连接了分歧点
$ \left( {\mathop r\limits^ \wedge ;\theta _a^*, 0} \right)$ 和$ \left(\tilde{r} ; \theta_{a}^{*}, 0\right)$ ,其中$ \left(\hat{r} ; \theta_{a}^{*}, 0\right)$ 且$ I - K(\mathop r\limits^ \wedge )$ 不可逆;(ⅱ) H在
$\mathbb{R}^{+} \times X $ 内从点$ \left(\tilde{r} ; \theta_{a}^{*}, 0\right)$ 延伸至∞;(ⅲ) H包含了一个点
$ (r ; u, v) \in \mathbb{R}^{+} \times(\overline{\overline Z} \backslash\{0\}) $ ,其中$\overline{\overline Z} $ 是$ N\left( {I - {K^*}(\tilde a)} \right)$ 的补空间.下面证明
$H-\left\{\left(\tilde{r} ; \theta_{a}^{*}, 0\right)\right\} \not \subset P $ .利用反证法,假设$ H-\left\{\left(\tilde{r} ; \theta_{a}^{*}, 0\right)\right\} \subset P$ ,则条件(ⅰ)不成立.类似于定理3中(ⅱ)和(ⅲ)的证明知,(ⅲ)不成立,且存在M″>0,使得当(u,v)∈H时,‖u‖,‖v‖≤M″.另一方面,由引理4知,r是有界的,故(ⅱ)也不成立.因此$H-\left\{\left(\tilde{r} ; \theta_{a}^{*}, 0\right)\right\} \not \subset P $ ,于是存在点$\left( {\mathop r\limits^ \wedge ;{u^*}} \right.\left. {{v^*}} \right) \in \left\{ {H - \left( {\tilde r;\theta _a^*, 0} \right)} \right\} \cap \partial P $ 和序列$ \left\{ {\left( {{r_n};u_n^*, v_n^*} \right)} \right\} \subset H \cap P, u_n^* > 0, v_n^* > 0$ ,使得当$ n \to \infty $ 时,${\rm{ }}\left( {{r_n};u_n^*, v_n^*} \right) \to \left( {\mathop r\limits^ \wedge ;{u^*}, {v^*}} \right) $ .依据极大值原理易知,$ \left( {{u^*}, {v^*}} \right){\rm{ }}$ 有以下3种可能:1)
${\left( {{u^*}, {v^*}} \right) = \left( {\theta _a^*, 0} \right)} $ ;2)
$ \left( {{u^*}, {v^*}} \right){\rm{ }}$ =(0,0);3)
${\left( {{u^*}, {v^*}} \right) = \left( {0, \theta _{\mathop r\limits^ \wedge }^*} \right)} $ .假设
$ \left( {{u^*}, {v^*}} \right){\rm{ }}$ =(θa*,0),则当$ n \to \infty $ 时,$ \left( {{r_n};u_n^*, v_n^*} \right) \to \left( {\mathop r\limits^ \wedge ;\theta _a^*, 0} \right)$ .令$V_n^* = \frac{{v_n^*}}{{{{\left\| {v_n^*} \right\|}_\infty }}} $ ,那么Vn*满足根据Lp估计和Sobolev嵌入定理知,存在Vn*的一个收敛子列(不失一般性,仍记为Vn*),使得当
$ n \to \infty $ 时,在$ C_{0}^{1}(\bar{\varOmega})$ 上有$ V_{n}^{*} \rightarrow V^{*} $ 成立,且$ V^{*} \geqslant 0\left(V^{*} \not \equiv 0\right), x \in \bar{\varOmega}$ .因此在(16)式中,令$ n \to \infty $ 得由极大值原理可得
$ V^{*}>0, x \in \varOmega $ .因此$ \mathop r\limits^ \wedge = \tilde r$ 与$ \mathop r\limits^ \wedge = \tilde r$ 矛盾.假设
$ \left( {{u^*}, {v^*}} \right){\rm{ }}$ =(0,0),与上面的方法类似,同样可得出矛盾.因此
$ \left( {{u^*}, {v^*}} \right){\rm{ }}$ =(0,$\theta _{\mathop r\limits^ \wedge }^* $ ),即H与H1连接于点($\mathop r\limits^ \wedge $ ; 0,$\theta _{\mathop r\limits^ \wedge }^* $ ).注2 定理4说明,(
$\mathop r\limits^ \wedge $ ; 0,$\theta _{\mathop r\limits^ \wedge }^* $ )是H1={(r; 0,θr*)}上的一个分歧点.因为$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 是半平凡解分支$\left\{\left(a ; 0, \theta_{r}^{*}\right)\right\} $ 上的分歧点,所以$\mathop r\limits^ \wedge $ 恰好由$a = {\lambda _1}\left( {\frac{m}{b} + \frac{{c\theta _{\mathop r\limits^ \wedge }^*}}{{1 + \beta \theta _{\mathop r\limits^ \wedge }^*}}} \right) $ 来决定.因此,我们可以得到系统(3)正解存在的一个充分条件,即有下面的结论成立.定理5 设
$ m <\min \left\{b^{2}, a b\right\}, \lambda_{1}+\frac{m}{b} <a <\lambda_{1}+\frac{m}{b}+\frac{c}{\beta}$ .若$ \tilde r < r < \mathop r\limits^ \wedge $ ,则系统(3)至少存在一个正解.
-
本节主要利用特征值线性扰动理论和稳定性定理[18-19]分别讨论分歧点
$ \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 和$ \left(\tilde{r} ; \theta_{a}^{*}, 0\right)$ 附近分歧解的稳定性.为了研究方便,引入下列记号:i:
$ X_{1} \longrightarrow Y$ 为由X1到Y的包含映射.引理5 0是
$L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 的i-单重特征值.证 由定理1的证明易知,
$ N\left(L\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right)=\operatorname{span}\left\{\left(\phi_{1}, \psi_{1}\right)\right\}, \operatorname{codim} R\left(L\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right)=1$ ,且$R\left(L\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right)=\left\{(\xi, \eta) \in X: \int_{\varOmega} \xi \phi_{1} \mathrm{~d} x=0\right\} $ .又因为$ i\left(\phi_{1}, \psi_{1}\right) \notin R\left(L\left(\tilde{a} ; 0, \theta_{r}^{*}\right)\right)$ ,故0是$L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 的i-单重特征值.引理6 0是
$L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 实部最大的特征值,其它特征值均在左半复平面上.证 反证法.假设λ0是
$L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 实部大于0的特征值,(ξ,η)是相应的特征函数,则$L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ (ξ,η)=λ0(ξ,η),即若ξ≡0,则λ0是算子-L0的一个特征值,其中L0由引理3给出,从而
$ \lambda_{0} \in \mathbb{R}$ 且λ0 < 0,矛盾,故ξ$ \equiv$ 0,于是λ0是算子$\Delta+\left(\tilde{a}-\frac{m}{b}-\frac{c \theta_{r}^{*}}{1+\beta \theta_{r}^{*}}\right) I $ 的一个特征值.由于$\tilde{a}=\lambda_{1}\left(\frac{m}{b}+\frac{c \theta_{r}^{*}}{1+\beta_{r}^{*}}\right) $ ,故0是$\Delta+ $ 的主特征值,从而有λ0≤0,所以假设不成立.因此0是$L \left(\tilde{a} ; 0, \theta_{r}^{*}\right)$ 实部最大的特征值,其它特征值均在左半复平面上.由引理5、引理6和文献[18-19]知,存在分别定义在
$\tilde a $ 和0邻域内的C1函数$ a \longrightarrow(\gamma(a), S(a))$ ,$ s \longrightarrow(\zeta ( s ), W(s))$ ,使得$(\gamma(\tilde{a}), S(\tilde{a}))=\left(0, \left(\phi_{1}, \psi_{1}\right)\right)=(\zeta(0), W(0)) $ ,并且其中
$S(a)=\left(u_{1}(a), u_{2}(a)\right), W(s)=\left(v_{1}(s), v_{2}(s)\right) $ .由于$ \gamma^{\prime}(\tilde{a}) \neq 0$ ,又若$ \zeta ( s ) \neq 0$ ,则这里a′(s)是a(s)关于s的导数,
$\gamma^{\prime}(\tilde{a}) $ 是γ(a)关于a在$ a=\tilde{a}$ 处的导数.分歧解
$(u(s), v(s)) $ 的稳定性完全由ζ(s)的符号决定.若ζ(s) < 0,则它们是稳定的; 若ζ(s)>0,则它们是不稳定的.另一方面,ζ(s)与$s a^{\prime}(s) \gamma^{\prime}(\tilde{a}) $ 的符号相反,因此根据$s a^{\prime}(s) \gamma^{\prime}(\tilde{a}) $ 的符号可以得出分歧解$(u(s), v(s)) $ 的稳定性.引理7
$\gamma^{\prime}(\tilde{a}) $ >0.证 由
$ L\left(a ; 0, \theta_{r}^{*}\right) S(a)=\gamma(a) S(a)$ 知由于
$|a-\tilde{a}| \ll 1 $ ,所以当a充分接近$ \tilde{a} $ 时,$ |\gamma(a)| \ll 1 $ .若u1≡0,则u2≡0,矛盾,故u1$ \equiv$ 0.因此,γ(a)是算子$\Delta+\left(a-\frac{m}{b}-\frac{c \theta_{r}^{*}}{1+\beta \theta_{r}^{*}}\right) I $ 的特征值.因为ϕ1>0,所以只要$|a-\tilde{a}| \ll 1 $ ,则u1(a)>0,由此可得γ(a)是$ \Delta+\left(a-\frac{m}{b}-\frac{c \theta_{r}^{*}}{1+\beta \theta_{r}^{*}}\right) I$ 的主特征值,且当$|a-\tilde{a}| \ll 1 $ 时,γ(a)关于a单调递增.又$\gamma^{\prime}(\tilde{a}) $ ≠0,所以$\gamma^{\prime}(\tilde{a}) $ >0.定理6 令
设
$r>\lambda_{1}, 0 <s \ll 1 $ .若Q>0,则由定理1给出的分歧解$ (u(s), v(s))$ 是线性稳定的; 若Q < 0,则分歧解$ (u(s), v(s))$ 是不稳定的.证 根据引理7及其上面的讨论知,要证明分歧解的稳定性,只需证明a′(0)与Q同号.把分歧解
$ (a(s) ; u(s), v(s))=\left(a(s) ; s\left(\phi_{1}+\phi(s)\right), \theta_{r}^{*}+s\left(\psi_{1}+\psi(s)\right)\right)$ 代入系统(3)第一个方程,再关于s在s=0处求导得在方程(17)两端同乘ϕ1,再在Ω上积分,并利用Green公式得
故
因此,a′(0)与Q同号.于是,若Q>0,则a′(0)>0,从而
$\zeta(s) <0(0 <s \ll 1) $ ,故结论成立.注3 显然在Ω上,ϕ1,ψ1>0.因为m < ab,所以若
$ \frac{a}{b}+\frac{c \alpha}{\beta} <1$ ,则因此Q>0,于是由定理1给出的分歧解是稳定的.
类似地,由定理2给出的分歧解的稳定性由J的符号决定,其中
显然,J>0.因此可得下面的定理成立.
定理7 设m < min{b2,ab}且
$ a>\lambda_{1}+\frac{m}{b}$ ,则当$ 0 <s \ll 1$ 时,由定理2给出的分歧解是无条件稳定的.
-
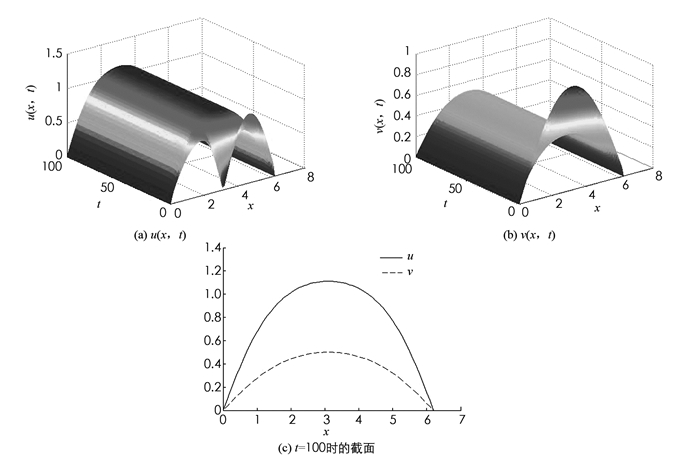
本节主要在一维情形下,利用Matlab工具模拟系统(3)解的情况.在一维空间Ω=(0,2π)下,系统(3)对应的抛物系统为
通过计算可得λ1=0.25.这里用Crank-Nicolson方法对(18)式的解
$ (u(x, t), v(x, t))$ 进行数值模拟(图 1),其中参数$a=1.6, m=0.23, b=0.5, c=1, \alpha=0.5, \beta=1, r=0.8, e=0.5, k=1 $ 均满足系统(3)正解存在的条件.图 1(a),(b)表明,当t趋于100时,食饵和捕食者的密度不再与时间有关,系统达到了平衡的状态.图 1(c)表明,在一定条件下,食饵和捕食者可以共存.