


 下载:
下载:

-
随着我国经济的发展,果树种植业发展很快,种植面积及产量迅速上升. 2013年,我国水果种植面积超过1 000万公顷,产量达到2亿吨.病虫害防治是水果生产过程中的重要环节,施药作业大约占到果园日常管理工作量的30%,施药质量直接影响到水果品质和产量.目前,我国果园总体机械化水平较低,施药技术相对落后,大部分作业依赖人工完成[1-4].传统施药作业以背负式手动喷药器为主,多数打药机农药利用率低,部分已经不适应生产的需求[5-8].而且,农药的过量施用,对土壤、水质造成大量污染[9-10].我国在上世纪80年代引进风送式喷药机,风送喷雾与常规喷枪相比,极大地提高了药液在靶标上的覆盖密度与均匀度[11].目前国内果园喷药机大多无自动对靶功能,由于某些果树种植间距较大,农药利用率仍有很大的提升空间.
国外对精细化喷药机的研究起步较早,利用红外、超声、激光、图像处理等技术获取靶标信息,确定喷雾方案[12]. Ch. G′ee等[13]基于图像处理技术对作物和杂草进行区分;Solanelles F等[14]使用风送式喷雾机,并结合超声波传感器识别果树,控制喷头开闭,实现对靶施药;Alja Osterman等[15]利用激光扫描仪精确地测得树冠轮廓数据,调整机械臂到最佳位置进行喷洒,达到精准施药的目的.近些年,国内学者也进行了研究并取得了较大成果.翟长远等[16]基于红外传感器设计了幼树对靶器;陈志刚等[17]利用微波技术探测靶标;张发军等[18]运用图像处理技术实现对靶.但这些研究都集中在喷头的水平和竖直移动,很少涉及喷头的自适应转动.
本文以手扶式履带车为载体,利用超声波传感器有效组合识别果树位置,利用滑轨控制喷杆水平及垂直移动,加入转动机构调整喷头角度,实现喷头多自由度运动控制,减少系统滞后造成的影响,提高果树树冠侧面部分的喷洒效果,并进行室外控制与喷洒效果试验.
全文HTML
-
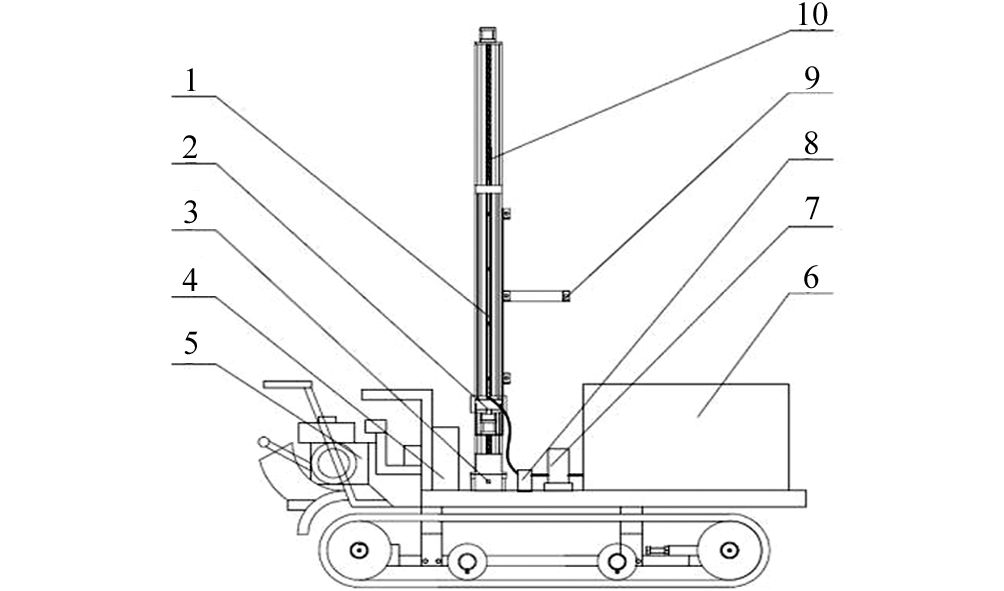
整个装置以手扶式履带车为载体,喷雾机的整体系统结构如图 1所示.主要由水平移动机构、垂直移动机构、转动机构、喷杆、传感器组、药箱、水泵、电磁阀、控制器及电源构成.
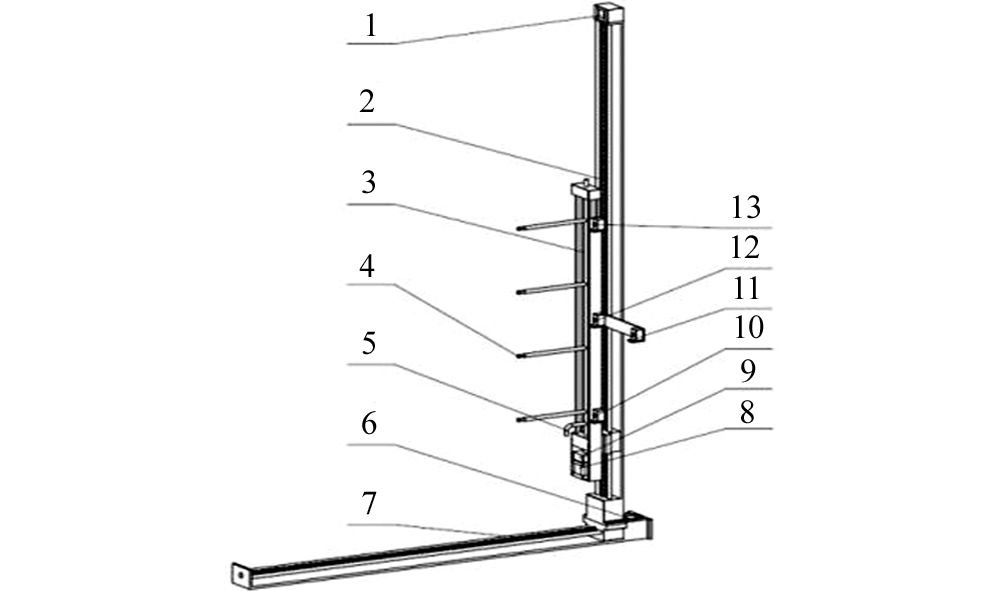
其中关键部件包括水平移动机构、垂直移动机构、喷头转动机构、喷杆及传感器组,如图 2所示.喷杆底部连接歩进电机,实现转动功能;喷杆及转动机构置于垂直滑轨上,水平滑轨及垂直滑轨实现喷杆的水平和垂直移动;超声波传感器组安装于喷杆侧面可随喷杆移动,用于识别果树.垂直丝杆导轨长1.7 m,水平丝杆导轨长1.5 m,喷杆长度1.1 m,喷头延伸出的距离为0.3 m,喷杆长度及喷头数量可根据实际使用需要自由组装.转动机构电机步距角为1.8°,扭力为1.2 N·m,减速箱减速比为1:10.超声波传感器型号为KS-109,最大识别距离为10 m,波束角在10°以内,1号传感器及3号传感器分别安装于与底部喷头及顶部喷头同等高度位置.在车速为0.3 m/s的情况下,2号传感器与4号传感器之间的距离设为0.3 m.
喷雾机实物图如图 3所示.
-
柱塞式水泵用车载220 V交流电源供电.将220 V交流电经过开关电源降为24 V直流,为步进电机及电磁阀供电. 24 V直流电经过LM7805降压至5 V给传感器供电;再用LM1117将5 V电压降至3.3 V给单片机供电,单片机均选用STM32F103CBT6.
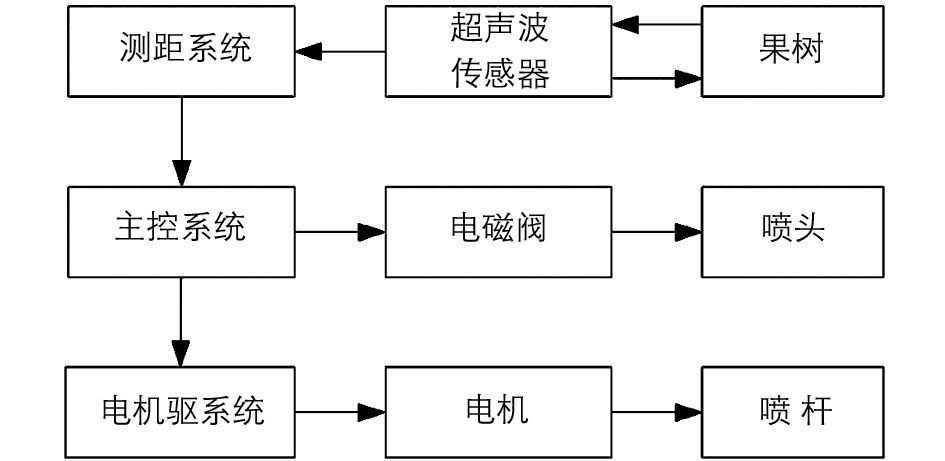
通过超声波传感器测得果树距离,数据经过处理后,利用CAN总线向主控系统发送数据.主控系统接收数据进行处理,发送指令到电机驱动系统控制电机转动调整喷杆位置及角度,并控制电磁阀来实现喷头的开闭.系统结构框图如图 4.
1.1. 系统结构组成
1.2. 工作原理
-
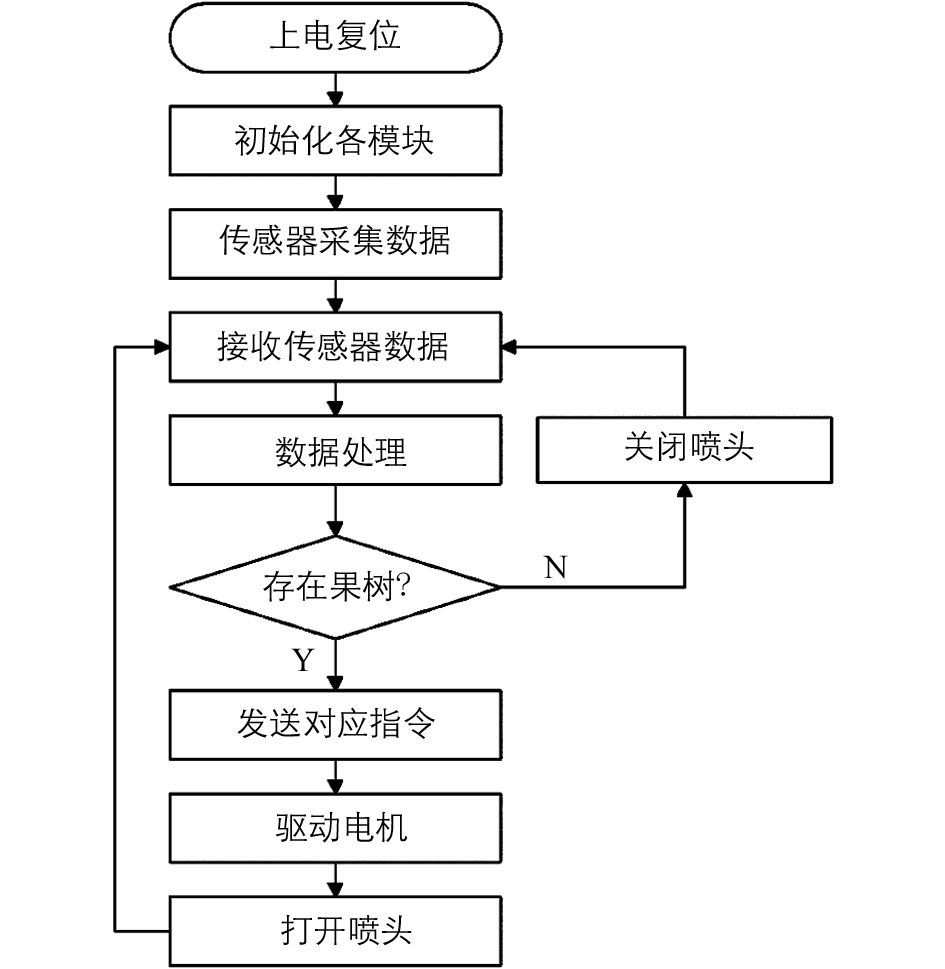
4个超声波测距模块组合探测果树距离,并将测得的数据通过CAN总线发送到主控系统.为避免传感器之间的相互干扰,利用中断方式触发探测,即1号传感器完成探测后,2号传感器收到报文触发中断并开始探测,3号、4号依照以上方式依次进行,使4个传感器有序地进行探测.当传感器所反馈的数据小于2 m时,则认为该传感器探测到了果树.只要有一个传感器探测到果树则打开电磁阀进行喷药.同时,以4个传感器所反馈数据中的最小值作为距离判断的主要依据,控制水平滑轨的移动方向及速度,调整喷杆离果树的距离. 1号及3号传感器来判断果树树冠的高度,控制垂直滑轨调整喷杆的高度.根据2号及4号传感器反馈的数据控制转动轴电机转动,经减速器减速后带动喷杆旋转,使喷头始终对准果树.系统总体流程如图 5所示:
-
水平方向控制依据传感器组反馈的数据选取最小的作为距离偏差E;滑轨移动速度为偏差变化率EC,作为输入变量;输出量为滑轨移动速度U.建立控制规则表如表 1所示.水平方向滑轨1档移动速度为0.05 m/s,2档速度为0.1 m/s.
表中:N2表示2档后退,N1表示1档后退,Z表示停止,P1表示1档前进,P2表示2档前进.
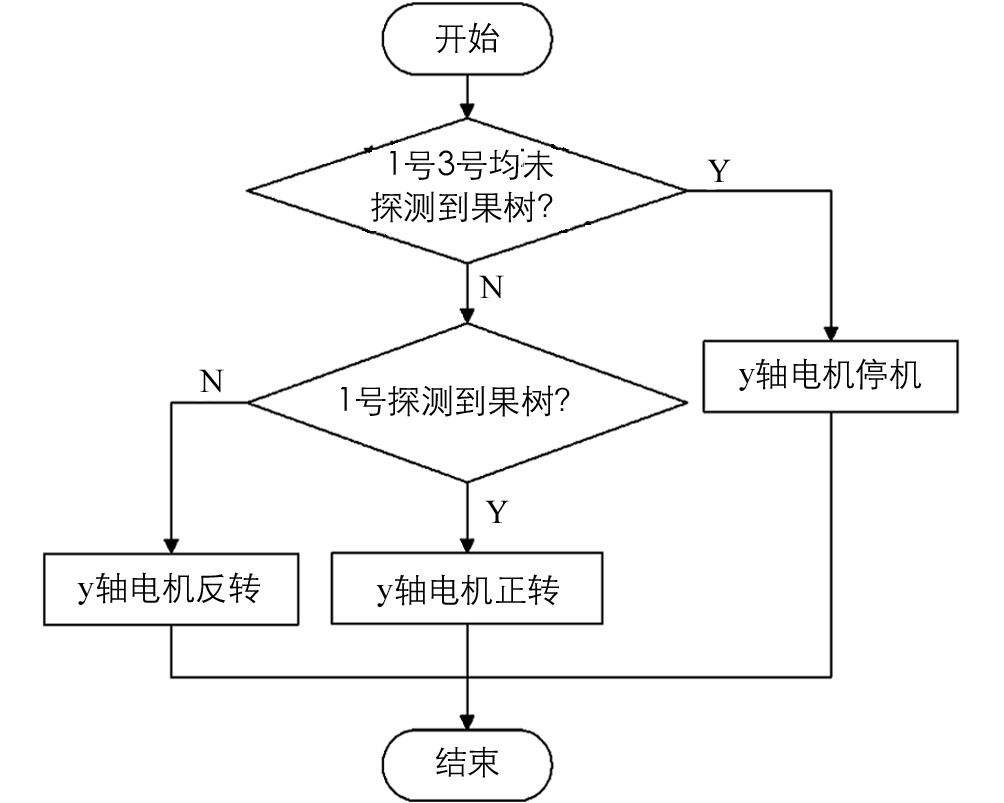
垂直方向控制规则为当1号和3号传感器都未探测到树冠时,电机停止;当1号探测到果树3号未探测到果树,则电机正转,喷杆下移;当1号未探测到果树3号探测到果树,则电机反转,喷杆上移.垂直方向滑轨移动速度为0.15 m/s.流程图如图 6:
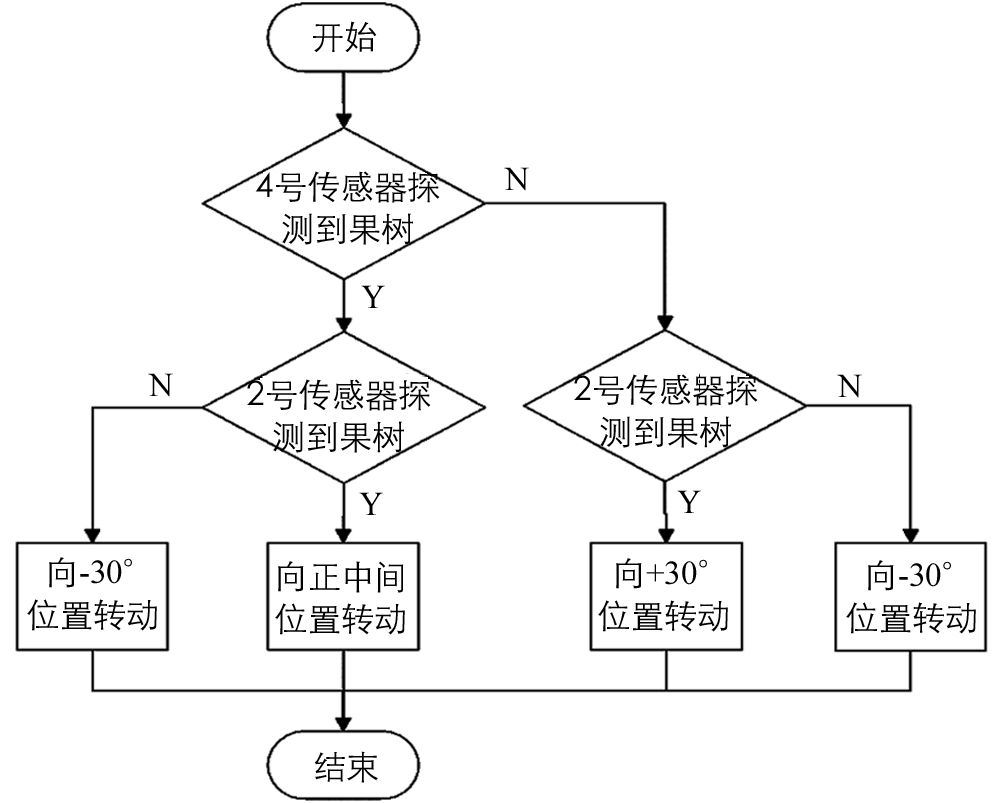
角度控制依据2号及4号传感器反馈的数据进行判断,依据2个传感器是否探测到果树来确定喷杆相对果树所在的位置,调整喷头的方向.传感器探测完整的一组数据所需时间为0.36 s;2号与4号传感器之间的距离为0.3 m;履带车低速行驶的速度为0.3 m/s;转动轴最大可转动角度为60°,转速为
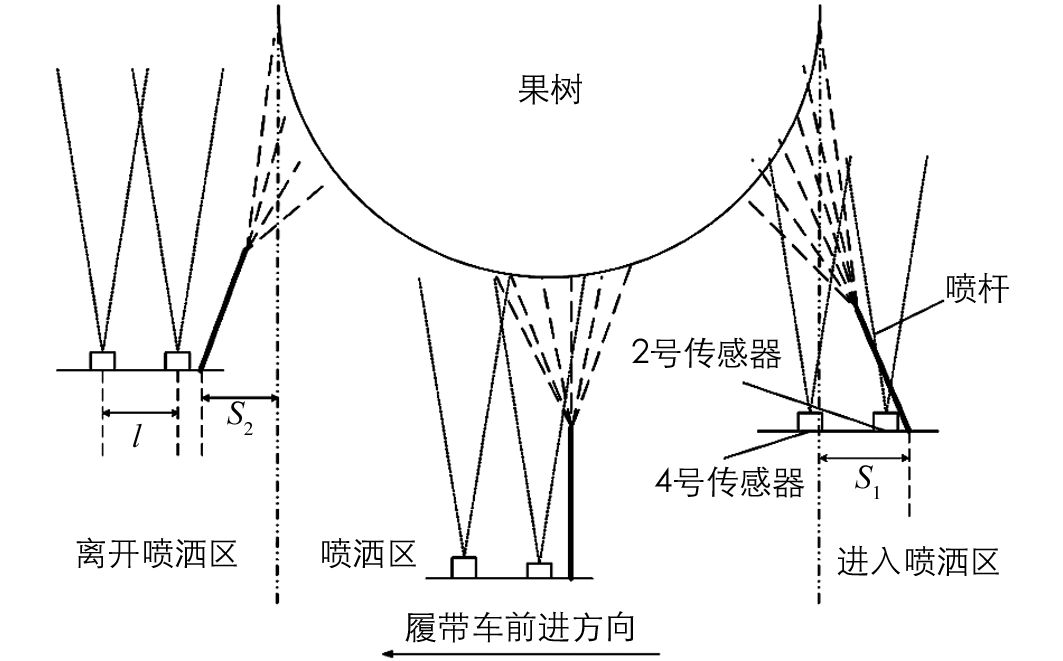
$\frac{1}{6}$ π rad/s.转动轴电机控制流程图如图 7所示:转动机构运动状态如图 8所示.设置喷头初始方向为斜向前30°,4号传感器探测到果树边缘,考虑传感器数据和喷头打开存在滞后及受到传感器波束角的影响,此时,喷杆离树冠右边缘的水平距离为
离开喷洒区后,2号传感器已探测不到果树,停止喷洒.此时,喷杆离树冠左边缘的水平距离为S2:
其中,d为传感器探测到离树冠的距离,θ为传感器的波束角,l为2号传感器与4号传感器之间的距离,ts为传感器的滞后时间,tv为喷头完全打开所需的时间,v为车行驶速度.
在果树边缘处d为0.6~1 m,传感器波束角为10°,车速为0.3 m/s,设置l为0.3 m.此时,S1为0.16~0.23 m,S2为0.21~0.28 m.
2.1. 总体控制措施
2.2. 控制算法
-
性能试验主要为了验证传感器的性能,喷杆的喷洒幅度,各部件的运动控制灵敏度,整个系统的延时及整机室外使用效果.
-
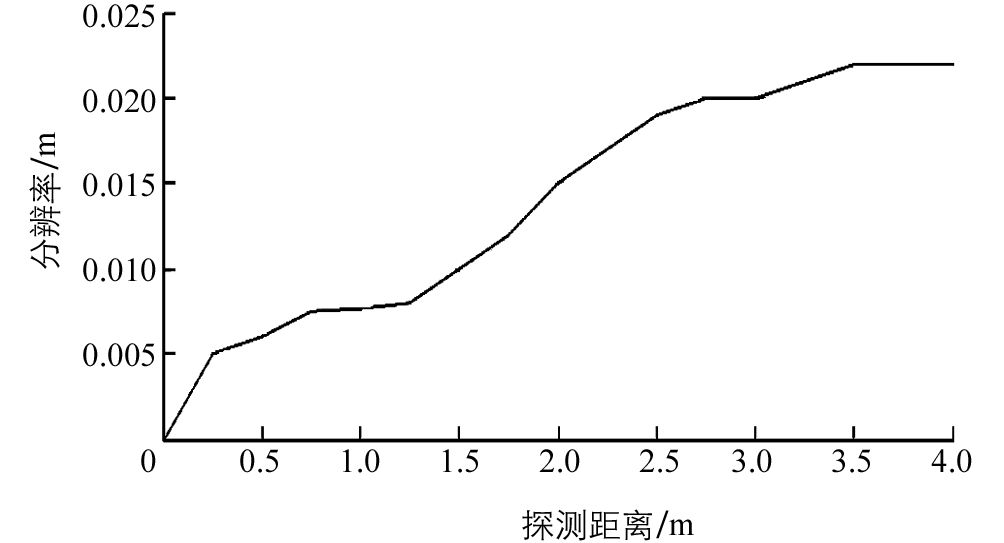
选择靶标为100×100 mm的方形硬纸板.以超声波传感器位置作为原点,每隔0.25 m放置靶标,水平移动靶标直到传感器无法探测到靶标为止,记录此时纸板边缘到传感器中心轴的距离[19].每个位置重复5次取平均值,得到超声波的探测范围如图 9所示.试验表明,超声波传感器探测物体距离在4 m范围内时,波束角小于10°,物体距离越近分辨率越高.
-
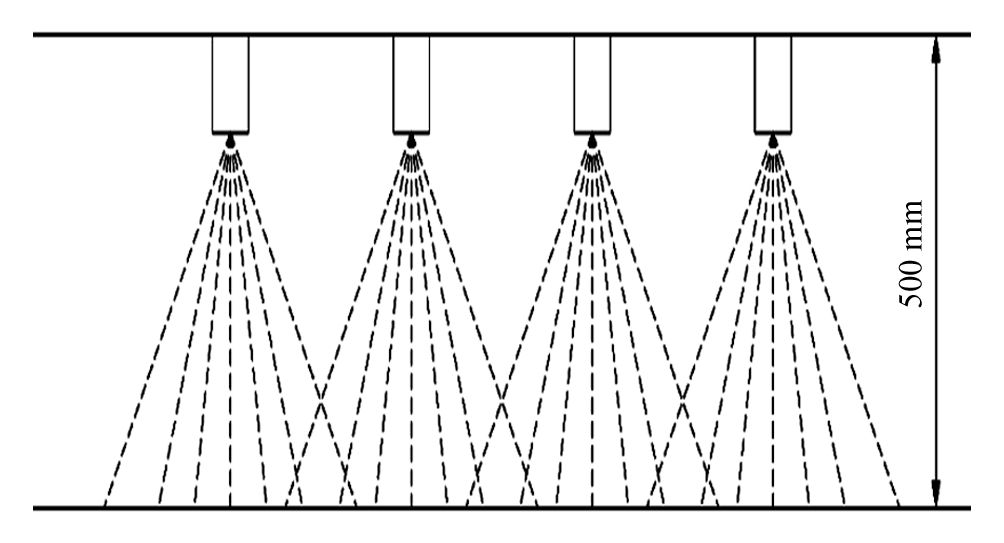
根据JB/T9782-2014,在室内无风环境下,喷嘴离地面高度为500 mm,在1.5 MPa的压力下分别选取孔径为0.6,0.7,0.8 mm的喷头进行喷雾,测量喷洒到地面上的药液实际幅宽,试验示意图如图 10所示,试验结果如表 2.在喷杆上安装孔径为0.6 mm以上的喷头喷幅大于1.2 m,满足室外试验需求,本装备安装孔径为0.8 mm.
-
利用秒表测试水平移动、垂直移动及转动最大行程的运行时间,分别测试5次取平均值,所得的数据如表 3所示,水平移动速度为0.1 m/s,垂直移动速度为0.15 m/s,转动轴转动速度为
$\frac{1}{6}$ π rad/s,与预设定值一致,达到既定效果. -
整个喷药系统的延时主要由距离测量所需的时间与喷头启动的滞后所造成.
每一个传感器完成一次探测的最长时间需要0.083 s,为了避免传感器之间的相互干扰,系统设定4个传感器依次探测,探测一组数据的时间为0.36 s,试验所测得的时间与设定的一致.
水泵压力为1.5 MPa,管道充满水的情况下,打开电磁阀,喷头完全打开的时间如表 4所示:
整个系统识别到果树到打开喷头的最大滞后时间为0.82 s;喷头关断时只考虑传感器造成的滞后,最大滞后为0.36 s,能够满足应用需求.
-
室外试验以五棵桂花树为目标,树高约2.2 m,树冠直径约1.6 m.小车以0.3 m/s的速度行驶.
-
喷杆在进入喷洒区前0.1~0.3 m处,4号传感器探测到果树,喷头逆时针转动并对准果树开始喷药;执行机构根据离果树的距离及果树高矮开始自动调整喷杆的位置及高度;进入喷洒区喷杆喷头自动调整到正对果树状态;在离开喷洒区前,4号传感器已探测不到果树,喷杆开始按顺时针转动重新调整姿态,使喷头转动对准果树;在喷杆离开喷洒区域0.15~0.33 m处,所有传感器均无法探测到果树,停止喷药,水平及垂直运动机构停止运动,转动机构复位
在整个运动过程中,喷头离果树的距离大于0.6 m时,喷杆向果树方向移动;距离小于0.4 m时,喷杆向后移动;喷头离果树的距离保持在0.25~0.75 m范围内.果树较矮时,喷杆向下移动,喷头最低可喷洒到0.7 m处树冠;果树较高时,喷杆向上移动,喷头最高可喷洒到2.4 m处.喷头在喷洒过程中始终指向果树.
-
覆盖率对比试验以五棵桂花树为目标,在每棵树冠上、中、下的每层平面内均布9个采样点,用水敏试纸承接雾滴.加入转动机构之后农药覆盖率与未加转动机构情况下进行对比,得到的结果如表 5.
试验结果表明,加入转动后侧面喷洒平均覆盖率明显提高,左侧由10.7%提高到30.3%,右侧由11.3%提高到33.1%,正面喷洒效果基本不变.利用超声波传感器有效组合,喷头不仅能够根据果树形态自动调整位置,使喷洒较均匀,而且还能显著提高侧面喷洒效果,提高了农药的利用率,实现了喷头自动控制和自适应的目标.
3.1. 室内试验
3.1.1. 传感器性能测定
3.1.2. 喷杆喷幅测定
3.1.3. 执行机构性能试验
3.1.4. 系统延时测定
3.2. 室外试验
3.2.1. 整机性能试验
3.2.2. 喷洒效果试验
-
1) 本文利用超声波传感器探测果树的位置、高度,通过控制3个电机实现了喷杆的上下、水平移动及喷头转动,并控制电磁阀实现喷头的开闭.
2) 传感器探测4 m范围内的物体时,波束角小于10°.喷杆喷幅在1.2 m以上,整个传感器测距系统延时为0.36 s,喷头完全打开所需时间为0.46 s.
3) 超声波传感器由于有一定的波束角,避免了由于树冠中的空隙存在所导致电磁阀频繁通断的问题.
4) 加入转动机构后,使喷头能更好地对准果树进行喷药,有效地提高了果树侧面的喷洒效果,并减少了由传感器波束角较大及系统延时造成的农药浪费.
5) 对于喷洒浓度要求较高的喷洒需求可以增加喷头的数量,若果树树冠较大可考虑延长喷杆增大喷幅.