-
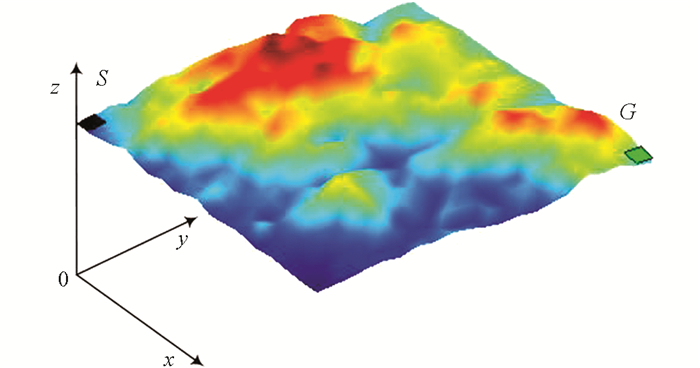
图 1 山地环境的空间曲面模型
-
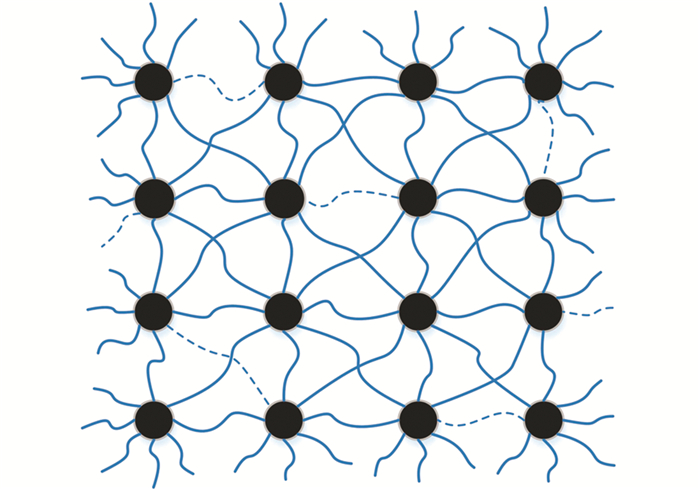
图 2 二维平面环境模型示意图
-
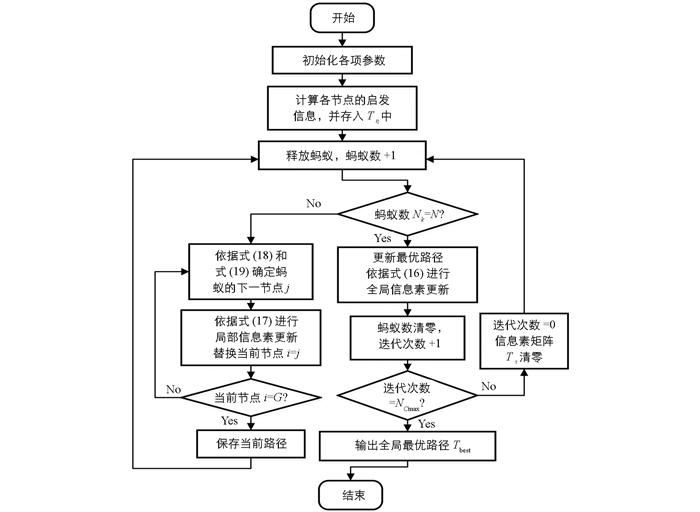
图 3 基本蚁群算法的流程
-
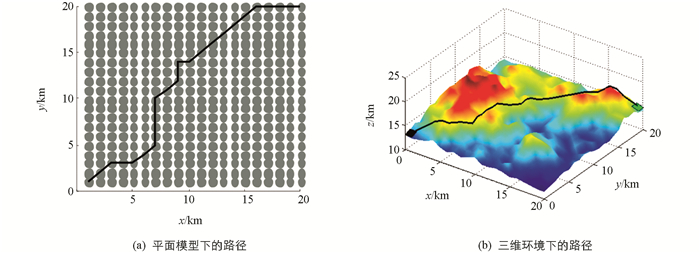
图 4 路程最短时的路径规划结果
-
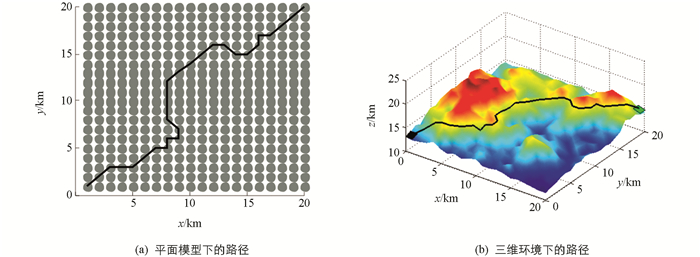
图 5 平稳性最好时的路径规划结果
-
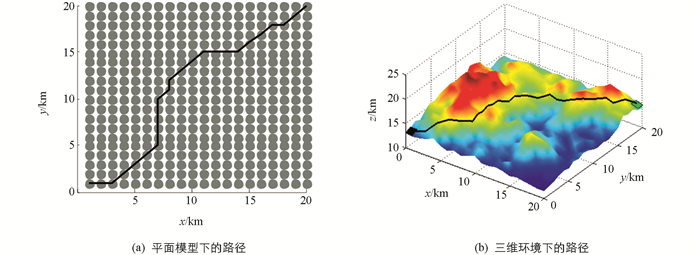
图 6 能耗最低时的路径规划结果
-
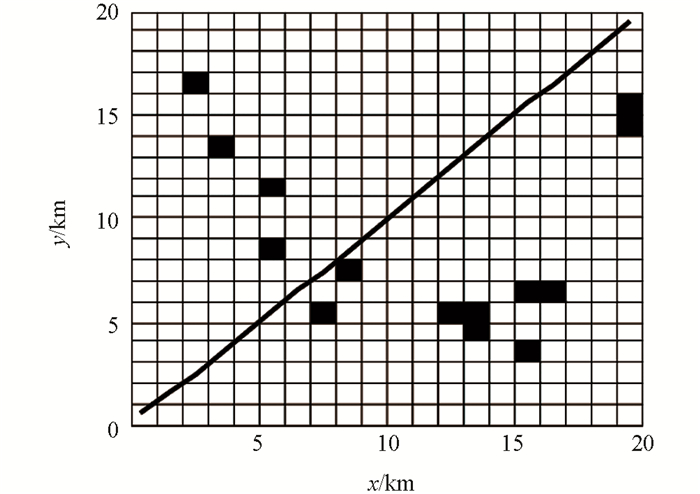
图 7 平面栅格环境模型下的路径规划结果
-
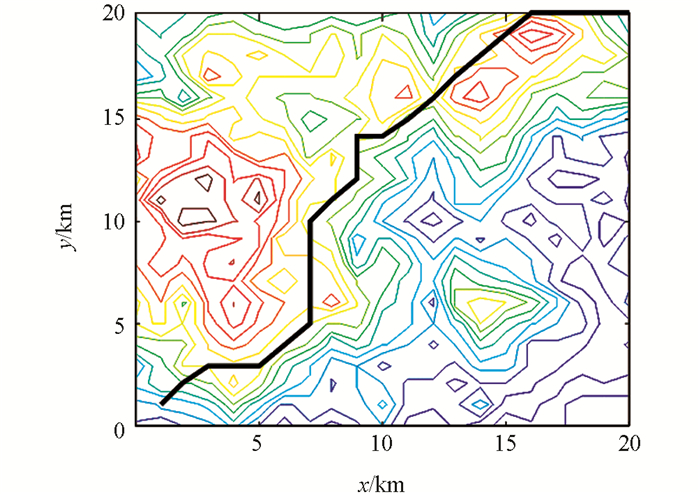
图 8 高程建模环境中的路径规划结果
Figure
8 ,Table
4 个