-
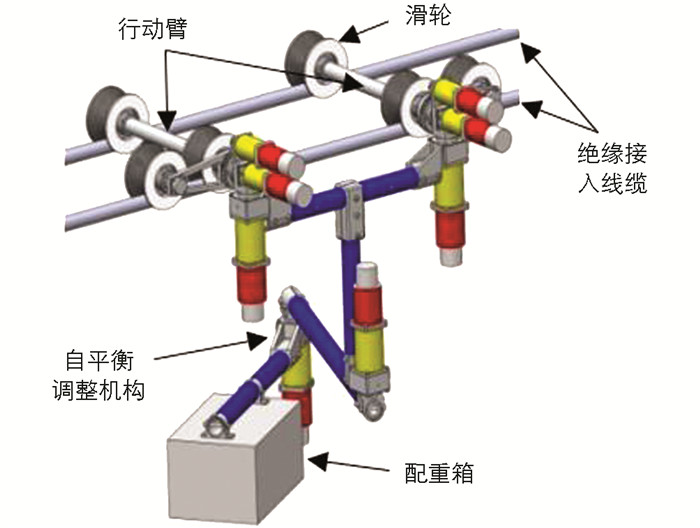
图 1 电力巡检机器人的线载模型
-
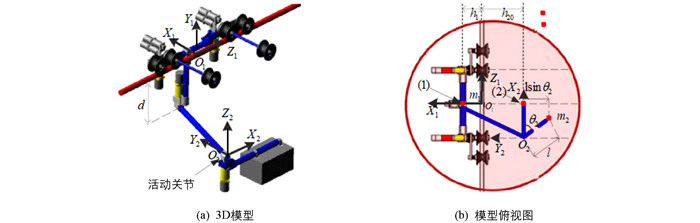
图 2 电力巡检机器人的平衡调整参数图
-
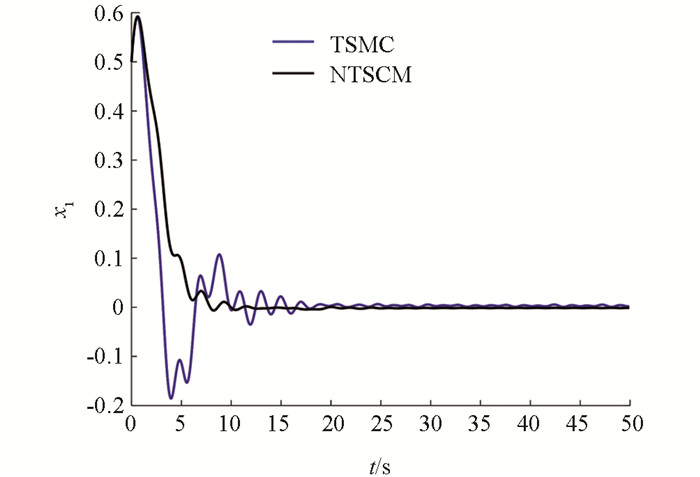
图 3 情况1中状态x1的仿真结果
-
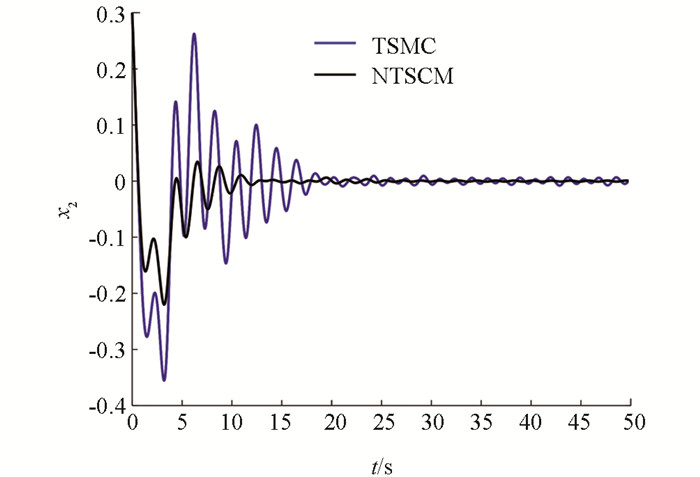
图 4 情况1中状态x2的仿真结果
-
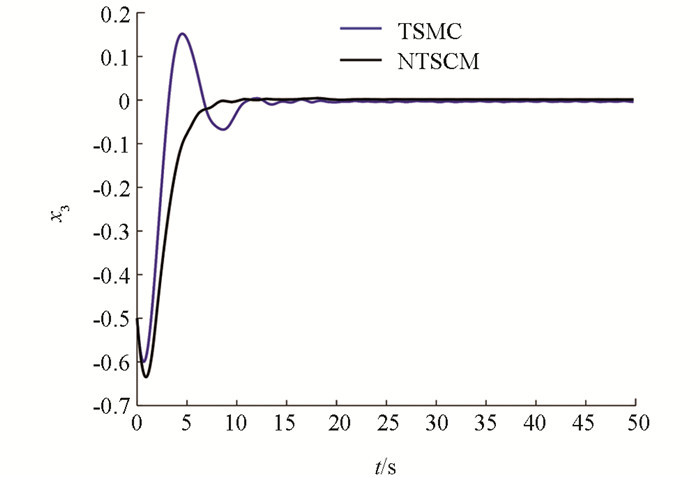
图 5 情况1中状态x3的仿真结果
-
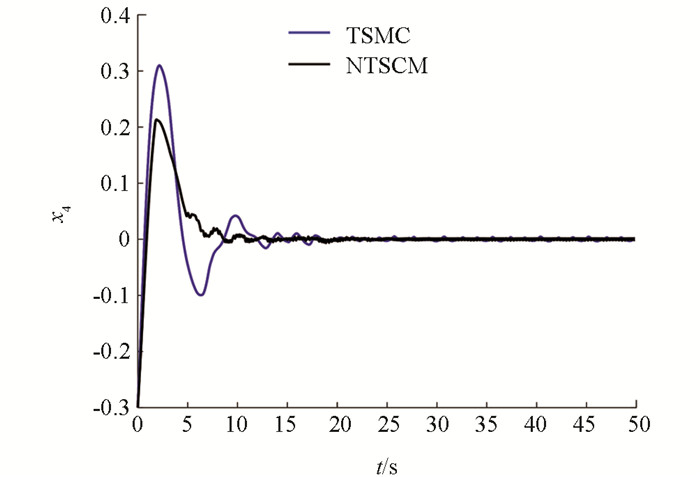
图 6 情况1中状态x4的仿真结果
-
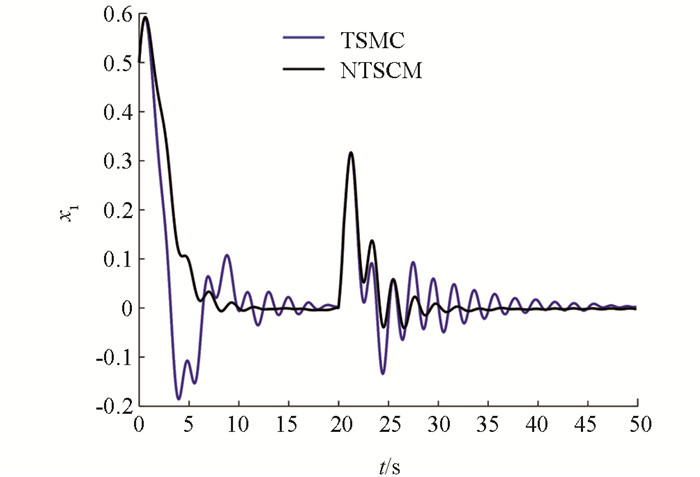
图 7 情况2中状态x1的仿真结果
-
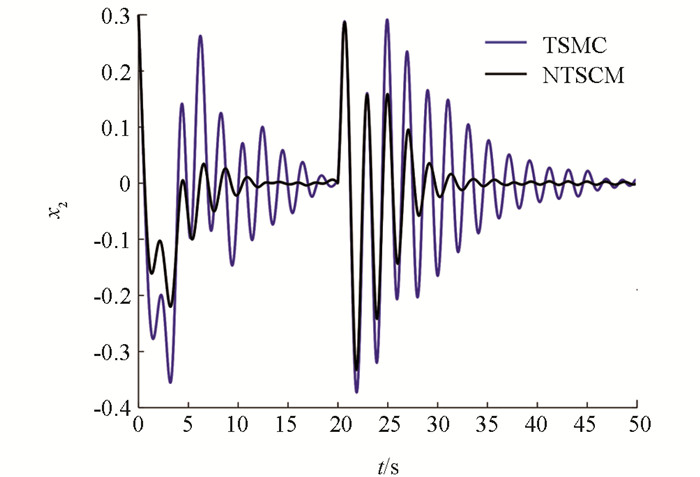
图 8 情况2中状态x2的仿真结果
-
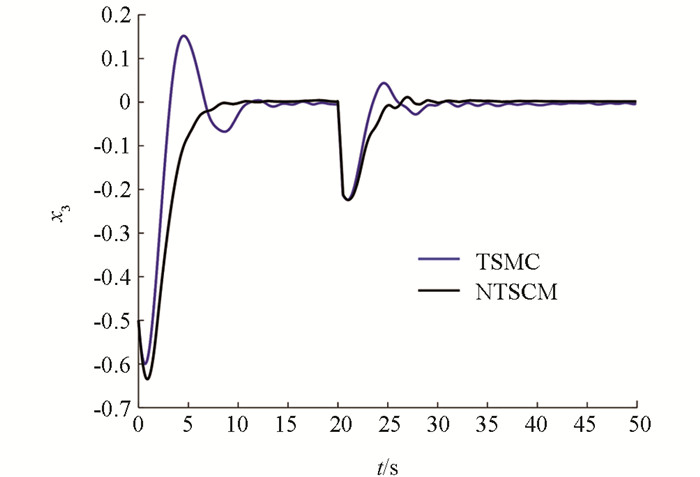
图 9 情况2中状态x3的仿真结果
-
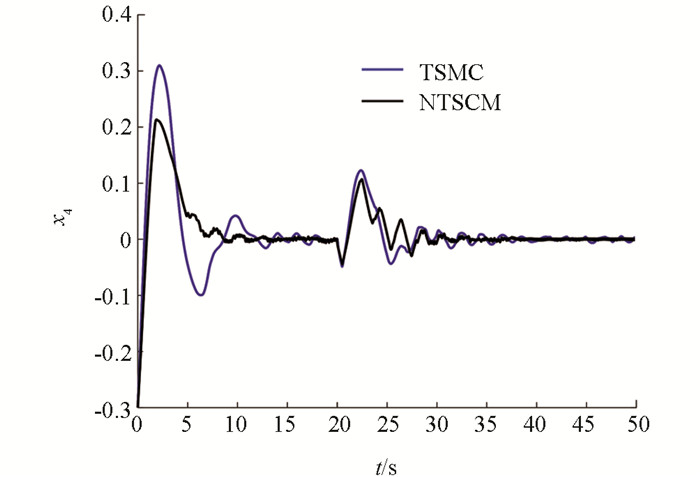
图 10 情况2中状态x4的仿真结果
Figure
10 ,Table
6 个