-
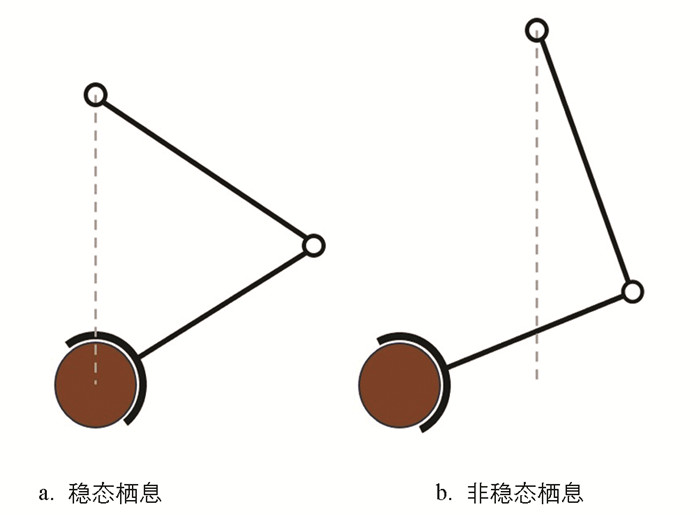
图 1 稳态栖息、非稳态栖息示意图
-
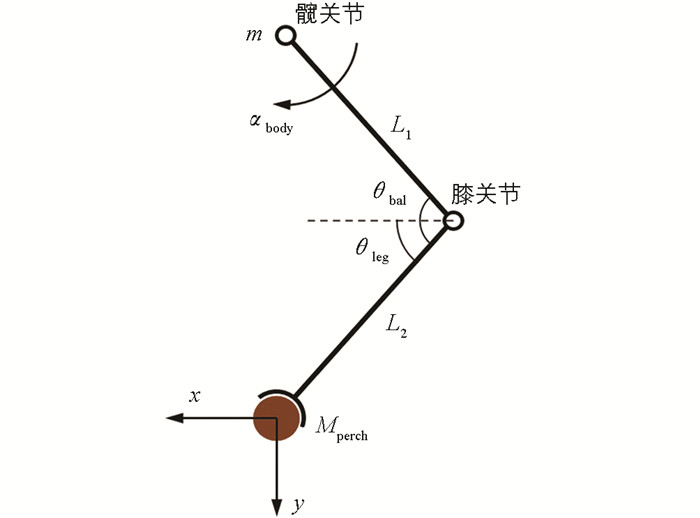
图 2 仿猛禽机器人稳态栖息模型
-
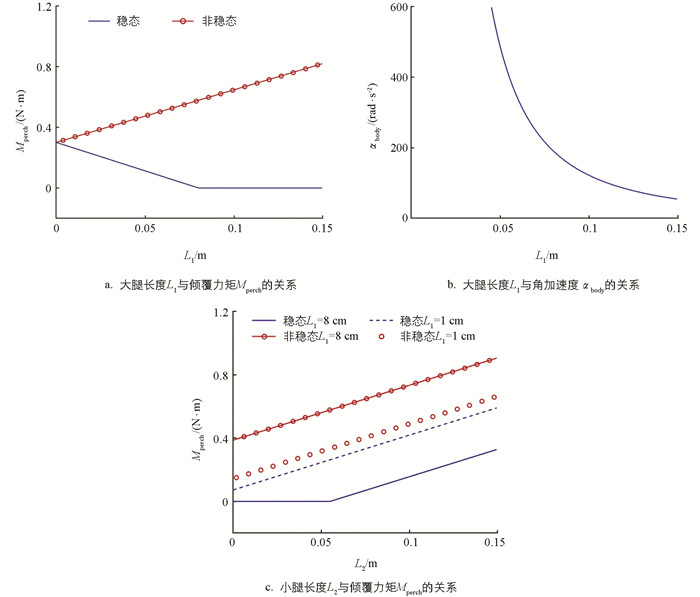
图 3 稳态、非稳态栖息模型与机器人大、小腿长度的关系
-
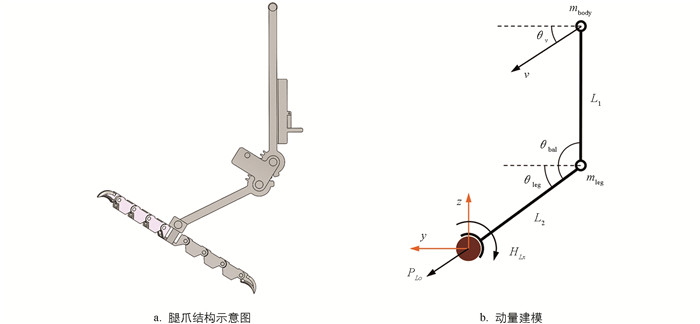
图 4 仿猛禽抓取腿爪动量建模
-
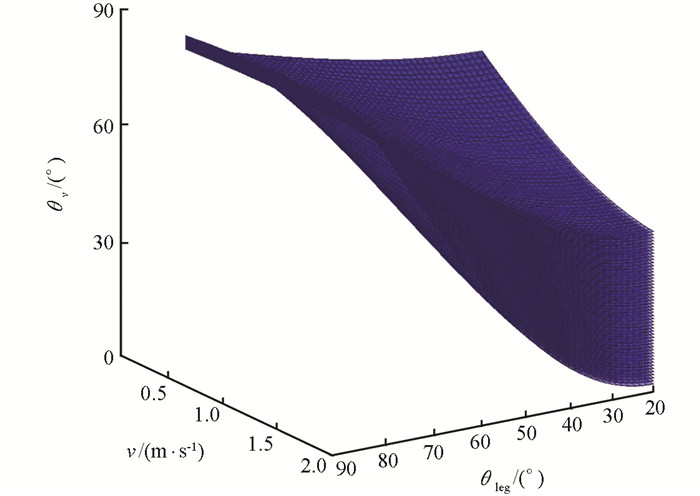
图 5 栖息成功参数域
-
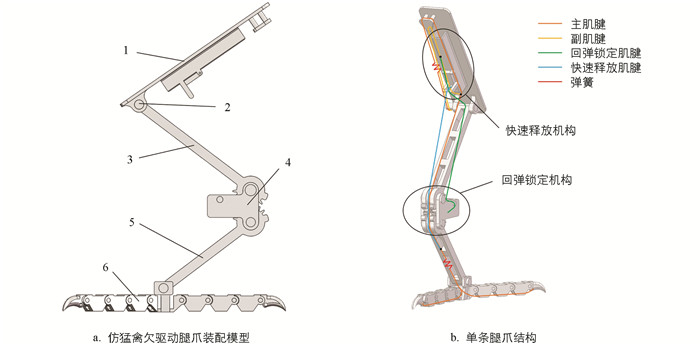
图 6 仿猛禽欠驱动抓握腿爪结构方案
-
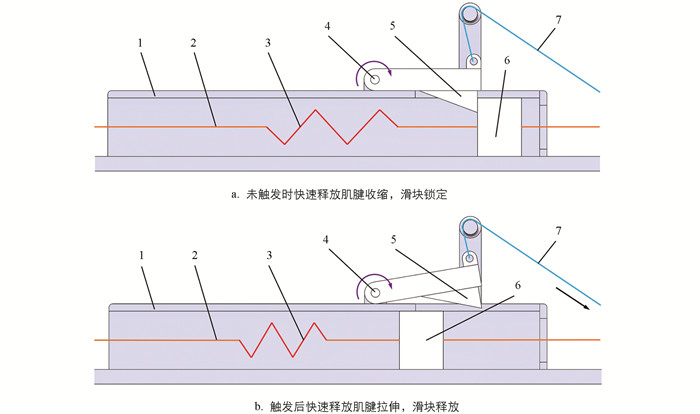
图 7 快速释放装置结构方案
-
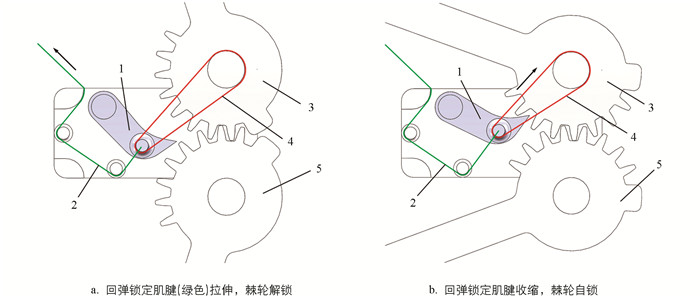
图 8 回弹锁定机构方案
Figure
8 ,Table
2 个