



 下载:
下载:
-
温度是农植物生长的一个重要物理量,过高与过低的温度都会抑制农植物的生长,故合理地控制温度对促进农植物生长、提升其产量有着十分重要的意义[1-2].目前,温度的控制方法以PID控制最为常见,它具有结构简单和稳定性好的优点.而在复杂的温室温度控制系统中,因其被控对象的大时滞性、强非线性与不确定性等特点,很难建立被控对象的精确数学模型,致使用传统PID设计的系统存在适应能力弱和控制精度低等问题[3-4].为此,本研究提出了一种积分分离模糊PID温度控制的改进方法,该方法兼容了PID控制与模糊控制[5-6]的优点,使得其不再依赖被控对象的精确数学模型,而且还能大大地提升温度控制系统的整体性能.通过仿真与实验结果证明,与传统PID控制方法相比,用本研究所提出的方法设计的温度控制系统有更高的控制精度与更强的鲁棒性能,更能符合温度控制系统的发展需求.
全文HTML
-
图 1为本研究所提出的积分分离模糊PID控制方法的结构框图,主要由模糊控制器与积分分离PID控制器两部分组成.其中,模糊控制器是一个2维输入、3维输出的系统,其输入为温度偏差量e(给定值r与输出值y的实时检测量之差)与ec(温度偏差量的变化率),输出为PID控制器的增益调节量ΔKp(比例调节量)、ΔKi(积分调节量)与ΔKd(微分调节量).则PID控制器的各参数Kp,Ki与Kd可表示为
式中:Kp0,Ki0与Kd0为PID控制器的初始控制参数,均是常量;而ΔKp,ΔKi与ΔKd是关于e与ec的函数,均是变量.因此,模糊控制器能根据不同的e与ec实现PID控制参数的在线自整定,从而增强了该方法的适应性与灵活性.而作为基本控制器的积分分离PID控制器的传递函数可表示为
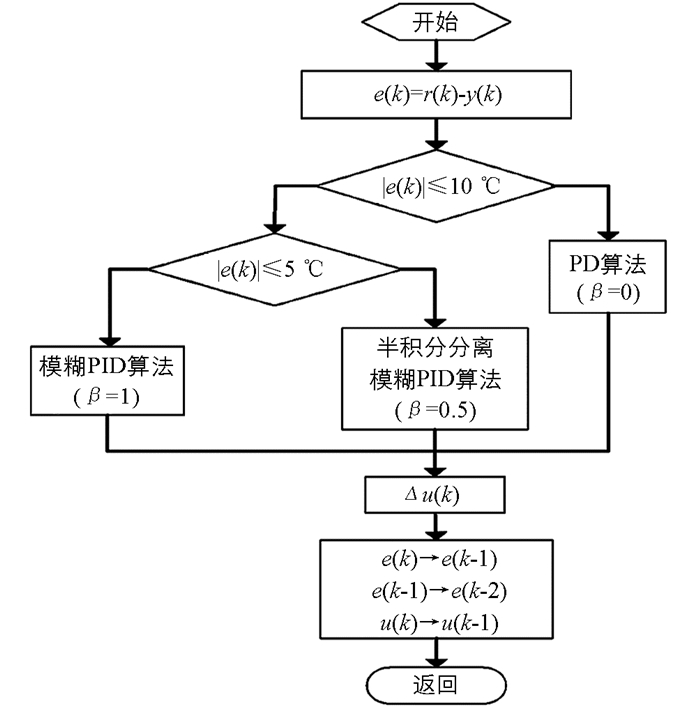
其中,β为分离系数.针对温室的温度被控对象,在本研究所提方法中,β的具体取值为
当|e|≥10 ℃时,取β=0,规定此时不引入模糊控制算法,控制器等价于PD控制,能提高系统的快速响应能力;当5 ℃<|e|<10 ℃时,规定此时引入模糊控制算法,且取β=0.5,控制器等价于半积分分离模糊PID控制器,能避免PD到PID控制转换时产生较大的扰动;当|e|≤5 ℃时,规定此时引入模糊控制算法,且取β=1,控制器等价于模糊PID控制,能提高系统的控制精度与鲁棒性.
-
研究已表明,温室温度控制系统的数学模型可用一阶惯性滞后环节来描述[7-8].其传递函数为
式中:K取0.9,为被控对象的静态增益;T取150,为被控对象的惯性时间常数;τ取60,为被控对象的滞后时间常数.因其含有大滞后环节,故本研究采用了表 1所示的ISTE最优整定法[9]来求取初始控制参数:
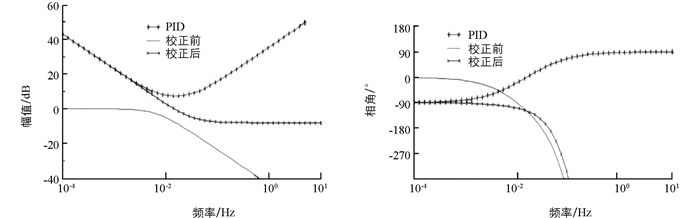
因此,可得如图 2所示的频率响应曲线.由图 2知,经PID校正后,系统开环穿越频率有所提高,相角裕度约为60°,幅值裕度约为6 dB,表明整定后的初始控制参数能使系统有较强的快速性与稳定性.
-
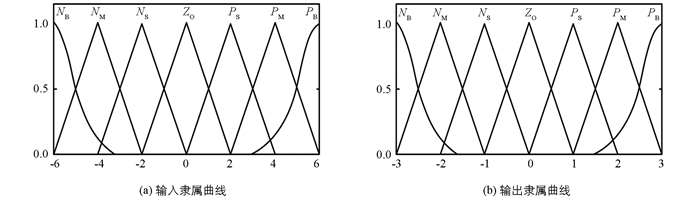
在设计模糊控制器时,其输入e,ec与输出ΔKp,ΔKi与ΔKd均选取7个模糊子集[10],即为:负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB).输入变量的论域选取[-6, 6],输出变量的论域选取[-3, 3],所有模糊子集的NB,PB的隶属函数都采用高斯型分布,剩余的选用三角形分布,则可得如图 3所示的各隶属函数曲线.
为反映输入输出变量间的关系,需建立模糊控制律,规定第i条的控制律描述为:
其中,Ai,Bi,Ci为输入输出变量在各自论域上的模糊子集.则该模糊控制器共有7×7=49条以上形式的if-then语句,这49条模糊语句可表示为如表 2所示的模糊规则见表 2.
2.1. 初始控制参数设计
2.2. 模糊控制器设计
-
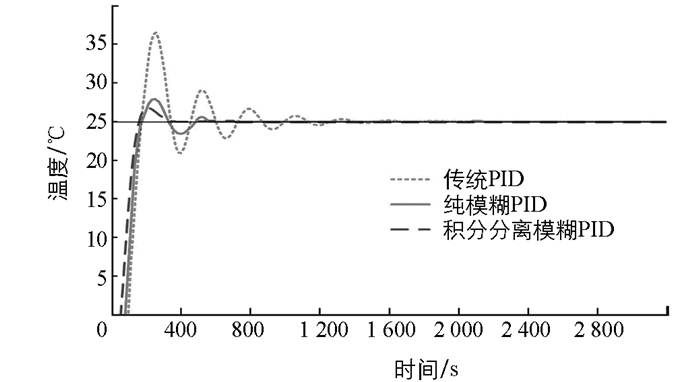
农作物生长对环境温度的要求比较高,适宜生长温度一般为25 ℃左右.假定被控对象的温度变化范围为0~40 ℃,在Matlab/Simulink环境下选择同样的数学模型对传统PID控制、纯模糊PID控制及本文提出的积分分离模糊PID控制进行对比分析,结果见图 4.由图 4可知,在温度设定为25 ℃的阶跃特性时,传统PID控制器的超调量约为44%,温度波动较大,调节时间长达1 000 s;纯模糊PID控制器的超调量较传统PID控制器小,约为12%,调节时间约为550 s;而本研究所提出的积分分离模糊PID控制器上升时间最快,超调量小至约为8%,调节时间也短至约为400 s.因此,本研究所提出的积分分离模糊PID控制方法具有良好的动、静态特性与鲁棒性,显著改善了系统控制的整体效果.
-
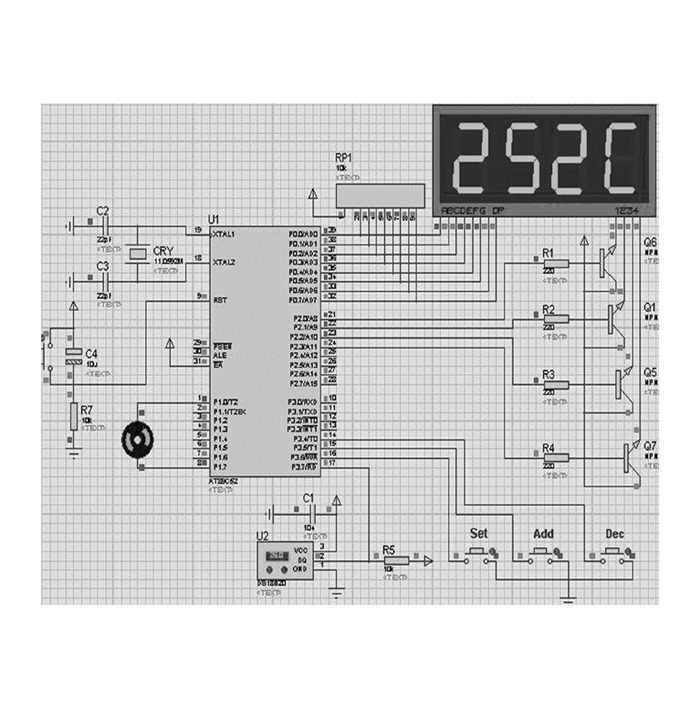
采用单片机与DS18B20搭建了一个温室温度模拟系统,其控制算法流程见图 5,运行效果见图 6.实验时设置上位机每分钟更新一次采集值,记录从开始控制到15 min结束的温度值见表 3.
由表 3可知,从开始控制到8 min时,系统进入了预设稳定状态,该阶段最大偏差约为0.2 ℃,满足农作物的适宜生长需求.
3.1. 仿真结果与分析
3.2. 实验结果与分析
-
本研究提出了一种基于积分分离模糊PID温度控制的改进方法,给出了该方法的详细设计过程,并通过算法对比仿真与模拟系统实测数据证实了该方法的正确性与可行性.结果表明,该方法较之传统PID控制方法有更小的超调、更快的响应速度及更小的稳态误差.因此,本研究所提的温度控制方法不仅更能适用于温室这一大惯性、大时滞、强非线性的复杂系统,而且还能为温室环境的控制提供更好的思路,具有较强的工程应用价值.