


 下载:
下载:
-
文献[1]提出混沌系统同步概念,为混沌在保密通信、非线性系统性能最优化、生态系统、人工神经网络、系统辨识和模式识别等领域的应用奠定了基础[2].许多混沌同步方式陆续被发现[3-11].同时,混沌控制技术也取得了快速的发展[12-15].
利用混沌控制实现混沌同步是混沌应用的前提,同时混沌同步方式的复杂程度影响着混沌保密通信的安全性.修正函数投影同步是指驱动系统和受控响应系统在不同的变量对之间以不同的函数比例实现同步.错位修正函数投影同步比修正函数投影同步更复杂,在保密通信等领域具有潜在的应用价值[10-11, 16-17].
为了进一步增大保密通信的密钥空间,提高保密通信的信息安全性,本文将广义错位投影同步和错位修正函数投影同步结合起来,提出混沌系统的广义错位修正函数投影同步.
全文HTML
-
文献[16]研究了一种广义错位投影同步方法,驱动系统和受控响应系统分别为
驱动系统和响应系统的广义错位投影同步误差为
于是得到驱动系统和响应系统的广义错位投影同步误差系统为
基于文献[16]广义错位投影同步方法,本文提出一种广义错位修正函数投影同步方法,该同步原理表述如下:设驱动系统
和响应系统为
其中:x=[x1,x2,…,xn]T∈
$\mathbb R^n$ 为驱动系统的状态向量;y=[y1,y2,…,ym]T∈$\mathbb R^m$ 为响应系统的状态向量;f:$\mathbb R^n$ →$\mathbb R^n$ 和g:$\mathbb R^m$ →$\mathbb R^m$ 是连续的非线性向量函数;u(x,y)∈$\mathbb R^m$ 为实现同步输入的控制函数.定义1 驱动系统(1)和响应系统(2)的广义错位修正函数投影同步误差为
如果当t→∞时ej→0,那么驱动系统(1)和响应系统(2)实现广义错位修正函数投影同步.
根据定义1,广义错位修正函数投影同步误差系统为
其中:n和m分别表示驱动系统和响应系统的维数,对它们之间的大小关系不作要求;αji(t)(i=1,2,…,n;j=1,2,…,m)为同步可微函数尺度因子.
构造Lyapunov函数,
其中P为正定矩阵.对Lyapunov函数求导,
结合(1)-(4)式,构造恰当的同步控制器u(x,y),使得
$\dot V$ 负定,根据Lyapunov稳定性定理,e的零解是渐近稳定的,驱动系统(1)和响应系统(2)实现广义错位修正函数投影同步.
-
广义错位修正函数投影同步原理对驱动系统和响应系统的维数n和m的3种大小关系都实用.为此,下面分n>m,n=m和n<m 3种情况,分别说明实现混沌系统错位修正函数投影同步的可行性.
-
选取文献[18]中构造的一个新超混沌系统为驱动系统,其微分方程组为
当系统参数a=10,b=28,c=2,θ=4,k=8时,系统(7)处于超混沌状态,奇怪吸引子如文献[18]中图 1所示.以Rössler系统为响应系统,受控的Rössler系统的动力学方程为
当参数a1=b1=0.2,c1=5.7时,Rössler系统处于混沌状态,u=[u1,u2,u3]T为同步控制器.
根据定义1,驱动系统(7)和响应系统(8)的广义错位修正函数投影同步误差为
根据(4)式得到驱动系统和响应系统的广义错位修正函数投影同步误差系统为
将(7)式和(8)式代入(10)式,可得,
定理1 如果响应系统(8)施加自适应控制器
那么驱动系统(7)和响应系统(8)能够实现广义错位修正函数投影同步.
证 选取Lyapunov函数为
显然,V是正定的,V的变化率为
易知
$\dot V$ <0,根据Lyapunov稳定性定理,[e1,e2,e3]→[0, 0, 0](t→∞),即驱动系统(7)和响应系统(8)实现了广义错位修正函数投影同步. -
以Lü系统为驱动系统,其动力学方程为
当参数a1=36,b1=20,c1=3时,Lü系统处于混沌状态.文献[19]提出具有双曲正弦函数耦合的三维混沌系统,其动力学方程为
其中:y1,y2,y3是系统的状态变量;u1,u2,u3是自适应控制器.当参数a=1.5且系统不施加控制器时,系统(18)具有四翼的混沌吸引子[19].
以系统(18)为响应系统,根据定义1,驱动系统(17)和响应系统(18)的广义错位修正函数投影同步误差为
根据(4)式,得到驱动系统和响应系统的广义错位修正函数投影同步误差系统为
将(17)式和(18)式代入(20)式,可得
定理2 如果响应系统(18)施加自适应控制器
那么驱动系统(17)和响应系统(18)能够实现广义错位修正函数投影同步.
证 选取Lyapunov函数为
显然,V是正定的,V的变化率为
易知
$\dot V$ <0,根据Lyapunov稳定性定理,[e1,e2,e3]→[0, 0, 0](t→∞),即驱动系统(17)和响应系统(18)实现广义错位修正函数投影同步. -
Chua系统是第一个用电路实现的混沌系统,其微分方程组为
其中f(x1)=m0x1+
$\frac{{1}}{{2}}$ (m1-m0)(|x1+1|-|x1-1|),且当系统参数p=10,q=14.87,m0=-0.68,m1=-1.27时,系统(27)处于混沌状态,具有双漩涡混沌吸引子.四阶细胞神经网络[20]的动力学方程为
系统(28)处于混沌状态,u=[u1,u2,u3,u4]T为同步控制器.
根据定义1,驱动系统(27)和响应系统(28)的广义错位修正函数投影同步误差为
根据(4)式得到驱动系统和响应系统的广义错位修正函数投影同步误差系统为
将(27)式和(28)式代入(30)式可得,
定理3 如果响应系统(28)施加自适应控制器
那么驱动系统(27)和响应系统(28)能够实现广义错位修正函数投影同步.
证 构造Lyapunov函数为
显然V是正定的,V的变化率为
易知
$\dot V$ <0,根据Lyapunov稳定性定理,[e1,e2,e3]→[0, 0, 0](t→∞),驱动系统(27)和响应系统(28)实现了广义错位修正函数投影同步.
2.1. 驱动系统维数大于响应系统维数
2.2. 驱动系统维数等于响应系统维数
2.3. 驱动系统维数小于响应系统维数
-
由于以上3种情况数值仿真的方法相同,下面仅对第二种情况进行仿真,说明理论分析的正确性和自适应同步控制器的有效性.任取驱动系统(17)和响应系统(18)的初值条件分别为[x1(0),x2(0),x3(0)]=[-5, 1, -3]和[y1(0),y2(0),y3(0)]=[5, 3, 6].不妨选取修正函数投影同步的比例函数矩阵
将(38)式代入(19)式,广义错位修正函数投影同步的误差(19)可重写为
根据系统(17)和(18)的参数a1=36,b1=20,c1=3,a=1.5,自适应控制器(24)重写为
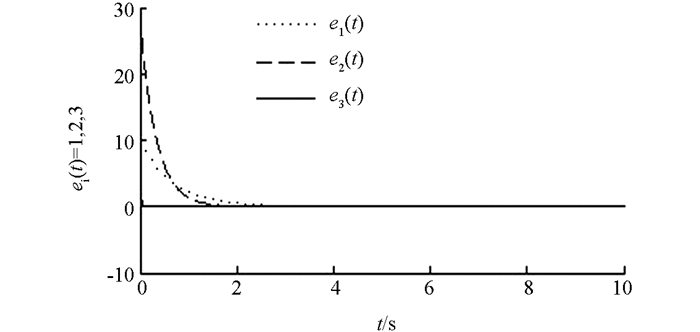
将控制器(40)代入响应系统(18),利用四阶龙格库塔法,得到驱动系统(17)和响应系统(18)的广义错位修正函数投影同步误差如图 1所示.
由图 1可知,驱动系统(17)和受控响应系统(18)的广义错位修正函数投影同步误差ei(i=1,2,3)在3s之内稳定收敛于零,说明在自适应控制器(40)下,驱动系统(17)和响应系统(18)能够快速实现广义错位修正函数投影同步.
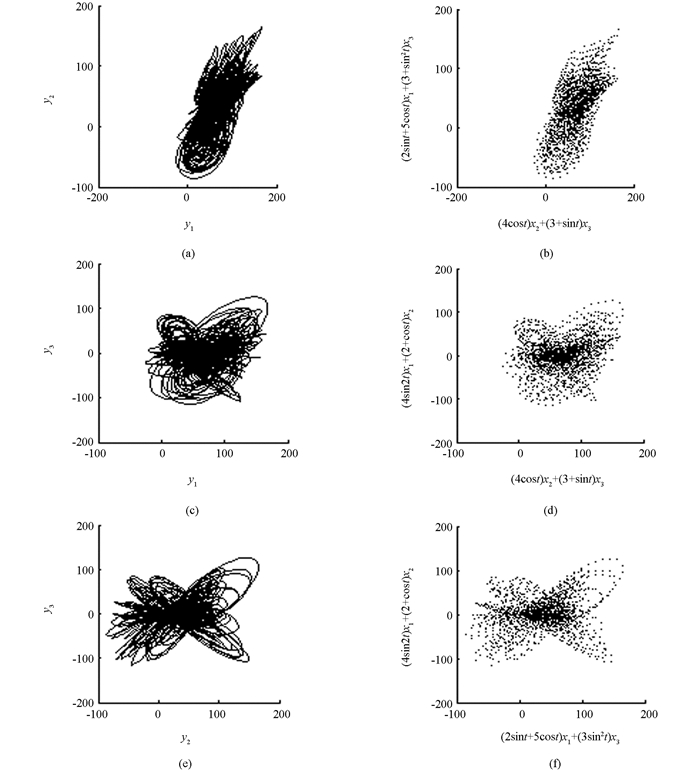
由图 2可知,驱动系统(17)和受控的响应系统(18)广义错位修正函数投影同步的相图完全一致,说明在自适应控制器(40)的作用下,驱动系统(17)和响应系统(18)按照同步比例矩阵(38)实现广义错位修正函数投影同步.
-
近似熵(approximate entropy,ApEn)是用混沌运动产生的信息量的大小来衡量混沌时间序列复杂程度的重要指标.混沌时间序列的近似熵越大,其复杂度就越高.文献[21]介绍的时间序列的ApEn算法如下:设长度为N的混沌时间序列为[y(1),y(2),…,y(N)],该时间序列的ApEn通过以下步骤算得:
第一步:构造m维的向量组Q(i)=[y(i),y(i+1),…,y(i+m-1)](i=1,2,…,N-m+1);
第二步:设a为d[Q(i),Q(j)]<r的j的个数,定义与第i个m维向量Q(i)的最大距离小于r的向量数为
第三步:设
$\varPhi^{m}(r)=\frac{1}{N-m+1} \sum\limits_{i=1}^{N-m+1} \ln C_{i}^{m}(r)$ ;第四步:混沌时间序列的近似熵为ApEn=Φm(r)-Φm+1(r).
取向量维数m=2,r=ad(y),a的范围为0.1≤a≤0.25,这里取a=0.15,d(y)为时间序列的标准差,N=5 489,对不加控制的混沌系统(18)和施加自适应控制达到修正函数投影同步的混沌系统(18)选取相同的初值条件[y1(0),y2(0),y3(0)]=[5, 3, 6],分别计算产生的时间序列的近似熵,计算结果如表 1所示.
从表 1可以看出,施加自适应控制达到广义错位修正函数投影同步的混沌系统(18)3个状态变量的ApEn值都大于不加控制的混沌系统(18)3个状态变量的ApEn值,且3个状态变量的平均ApEn值高达31.73%,说明驱动系统(17)和施加控制的响应系统(18)实现广义错位修正函数投影同步时,同步混沌时间序列比不施加控制系统(18)的时间序列更加复杂,用这样的同步混沌时间序列进行保密通信和图像加密,安全性会更高,因此本文研究的混沌系统的广义错位修正函数投影同步具有重要的应用价值.
-
本文研究了混沌系统的广义错位修正函数投影同步控制问题.对驱动系统和响应系统维数的3种大小关系,分别设计自适应同步控制器,实现每种类型驱动系统和受控响应系统的广义错位修正函数投影同步;数值仿真的结果验证了自适应控制器的正确性和有效性.
广义错位修正函数投影同步是广义错位投影同步和错位修正函数投影同步的更一般情况,该同步方式的提出,丰富了混沌系统的同步方式,具有重要的理论意义.同时,混沌系统广义错位修正函数投影同步时间序列的ApEn值更高,说明这种同步混沌时间序列更为复杂,在混沌保密通信中具有潜在的应用价值.