


 下载:
下载:
-
对机动目标进行有效跟踪是工程上比较难解决的一个问题,主要体现在保证算法对机动目标的跟踪效果的同时,还要求有较高的实时性和稳定性.针对稳定性的问题,文献[1]提出一种自适应的卡尔曼滤波方法,有效解决了算法容易发散的问题. Singer模型将目标加速度视为时间相关的随机过程,并通过设置机动时间常数和目标加速度方差等先验参数,可以适用于各种机动类型的目标跟踪,具有计算量小、环境适应性强、实时性高等优点,是工程上常用的滤波算法之一.
Singer模型是一种全局统计模型,其模型参数反映的是目标运动过程的统计特性[2].然而,目标的机动往往具有局部性,不同时间段内其机动强弱可能不同.在多目标跟踪时,同一时间不同目标的机动强弱也可能不同.用同样参数的Singer模型跟踪不同类型的机动模式,可能在某一段时间某个目标的跟踪效果好,而在另外一段时间其跟踪效果很差.在多目标跟踪时,可能某个时刻某几个目标的跟踪效果好,而其他目标的跟踪效果很差.鉴于此,文献[3]提出了用交互式多模型算法(IMM)跟踪目标,模型集中包含以典型参数建立的3种Singer模型.交互式多模型算法通过实时更新模型概率来自适应调整滤波模型[4-5],因此对机动目标有较好的跟踪效果.但由于多个模型参与滤波,增加了跟踪的计算量,从而降低了算法的时效性.文献[6]的改进算法先依据目标机动的可能等级,设定多组相应的参数,并根据滤波中加速度的滤波值变化,来确定当前时刻的机动等级,同时设置Singer模型在当前时刻对应的参数α和σ2,然后用新的状态方程滤波.这个改进算法的运算量与Singer模型相同,跟踪效果也有较大提升.但是,这种离散调整参数及加速度方差的方法可能会因为隶属度等级发生变化而造成对系统过程噪声估计的突变,导致跟踪精度的损失,从而造成较大的误差.此外,隶属度参数的设定有较大的主观性及场景依赖性,不能适应复杂的场景.
基于以上两种改进算法,深入分析交互式多模型算法中的模型似然函数及Singer模型滤波中几个参数对滤波效果的影响,本研究提出一种基于模型似然函数的加速度自适应算法.通过模型似然函数自适应调整加速度,不会造成调整的突变,且这个算法的计算量与Singer模型相当,能够同时满足对弱机动及强机动目标准备跟踪的要求.
全文HTML
-
Singer模型认为,机动模型是相关噪声模型,而不是通常假定的白噪声模型.对目标加速度a(t)作为具有指数自相关的零均值随机过程建模[7],即:
其中σm2和α是在区间[t,t+τ]内决定目标机动特性的待定参数:σm2是目标的加速度方差,α是机动时间常数的倒数,即机动频率.
对于机动加速度方差σm2,通常假设机动加速度的分布为:
(1) 机动加速度等于极大值amax的概率为pM,等于-amax的概率也为pM;
(2) 机动加速度等于极大值0的概率为p0(非机动概率);
(3) 机动加速度在区间[-amax,amax]上近似服从均匀分布.
由此假定,可得概率密度函数为
式中:1(.)是单位阶跃函数;δ(.)是狄拉克脉冲函数.由(2)式可得噪声方差为
则Singer模型的状态方程可以表示为
其中:
噪声协方差为:
-
Singer模型中参数α和σm2的确定依赖于先验知识,且一旦确定,在滤波过程中不再变化.因此,当事先确定的参数α和σm2与实际情况有较大差别时,滤波精度会变得较低.为了弥补Singer模型这一缺点,文献[2]提出了一种参数自适应调整的Singer模型滤波算法.它依据目标机动的可能等级,设定多组相应的参数α和σm2;在滤波过程中依据加速度的滤波值,确定目标在当前时刻的机动等级,并设置Singer模型在当前时刻对应的参数α和σm2,从而在之后的跟踪过程中使用新的状态方程滤波.
具体过程为:
1) 依据机动等级,事先设定N组参数α和σm2.可以计算出相应的状态矩阵F(k,α)和过程噪声协方差Q(α,σm2).
2) 依据当前时刻卡尔曼滤波器输出的加速度估计值
$\mathop a\limits^ \wedge $ (k|k),选择合适的参数α和σm2:① 若ai-1,max <
$\mathop a\limits^ \wedge $ (k|k) < ai,max,则选择α=αi,σm2=σm,i2;② 若
$\mathop a\limits^ \wedge $ (k|k) < a1,max,则选择α=α1,σm2=σm,12;③ 若
$\mathop a\limits^ \wedge $ (k|k)>aN,max,则选择α=αN,σm2=σm,N2.3) 计算F(k,α)和Q(α,σm2),并进行滤波.
这种参数自适应调整的Singer模型算法,所需的运算量与原Singer模型相同,但跟踪效果大大提升.然而,这种自适应调整算法是依赖于事先设定的N组机动参数,参数的设定有较大的主观性.此外,这种参数调整方法是离散的,当隶属度发生变化时,会造成参数调整的突变,从而可能会带来较大的误差.因此,本研究试图找到一种连续调整Singer模型参数的方法.
-
α是Singer模型的机动频率参数,一般认为大气扰动时机动频率参数α=1,机动频率参数α=1/60,表示慢速转弯机动;机动频率参数α=1/20,表示逃避机动[8].机动频率参数α取值越大,过程噪声协方差Q越大.
由Singer模型状态方程可知,加速度方差与过程噪声协方差阵成正比.而Singer模型的最大加速度amax与加速度方差也是正相关.因此,当amax越大,则过程噪声协方差Q越大,而当amax越小,则过程噪声协方差Q越小.因此,当目标发生强机动时,最大加速度amax取较大的值,滤波误差较小,效果较好.当目标弱机动时,最大加速度amax取较小的值,滤波平滑的效果比较好.
增加过程噪声协方差阵Q,相应的滤波增益矩阵也会增大,进而加大了系统的校正权值,越能适应强机动;减小过程噪声协方差阵Q,相应的滤波增益矩阵也会减小,进而减小了系统的校正权值,此时对弱机动目标的跟踪效果更好.因此,可以通过实时改变amax,达到调整滤波效果的目的.
-
IMM算法[9]滤波过程中,每个时刻所有模型并行地进行滤波.模型的似然函数用来表示当前滤波模型的可能性:
式中:vki为第i个模型在k时刻滤波的残差,Ski为第i个模型在k时刻滤波的残差协方差.其中,归一化的新息平方εk=(vki)′(Ski)-1vki作为目标机动检测的变量被广泛使用.
由(9)式可以看出,似然函数是新息的函数,且新息越大,似然函数取值越小,表明模型可能性越小.因此,考虑用模型的似然函数作为目标机动检测的变量.
如果把Singer模型取不同的参数当作是不同的滤波模型,则当时间常数及其他几个参数确定时,可以把Singer模型取不同的最大加速度amax看作是不同的模型.如果把最大加速度amax与模型似然函数联系起来,那么就找到了基于似然函数变化的自适应Singer模型算法.
具体地,假设第一个时刻,初始似然函数为:
假设初始时刻的最大加速度为a0,max,则第k个时刻对应的似然函数为:
使用模型的似然函数来实时更新最大加速度amax,可以表示为:
将k时刻的最大加速度ak,max,带入Singer模型滤波公式中,求得状态转移矩阵F和过程噪声矩阵Q,通过卡尔曼滤波公式实时更新滤波状态值.
3.1. Singer模型参数分析
3.2. 基于模型似然函数的自适应Singer模型方法
-
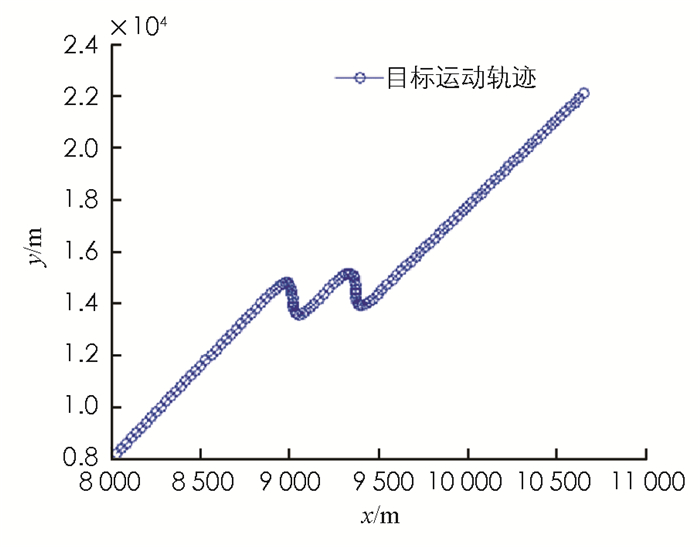
假设采样周期是T=1 s,目标的初始状态是X0=[x,
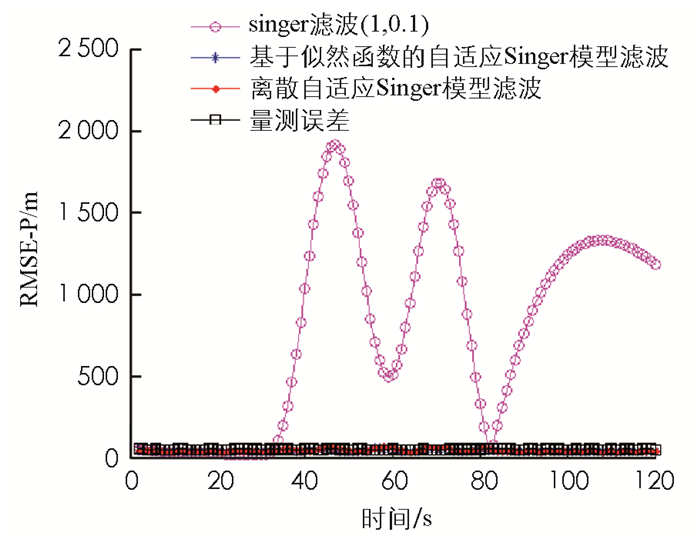
${\dot x}$ x,${\ddot x}$ ,y,${\dot y}$ ,${\ddot y}$ ,z,${\dot z}$ ,${\ddot z}$ ]T,其中X0=[8 000,28,0,8 000,200,0,10 000,0,0]T,其中位置的单位是m,速度单位是m/s,加速度单位是m/s2;目标先做直线运动,然后以角速度为15°/s做2个S转弯机动,最后做直线运动. 3个方向的量测噪声都为均值是50 m的高斯白噪声,得到目标运动轨迹(图 1).蒙特卡洛仿真100次,分别计算Singer模型算法取不同参数及两种自适应Singer模型滤波算法的位置均方根误差,分别画出算法的滤波位置均方根误差(RMSE-P)曲线(图 2).
由图 2可以看出,当Singer模型的参数取α=1,amax=0.1时,模型参数与目标的机动不匹配,目标发生机动时,Singer模型的滤波误差非常大.
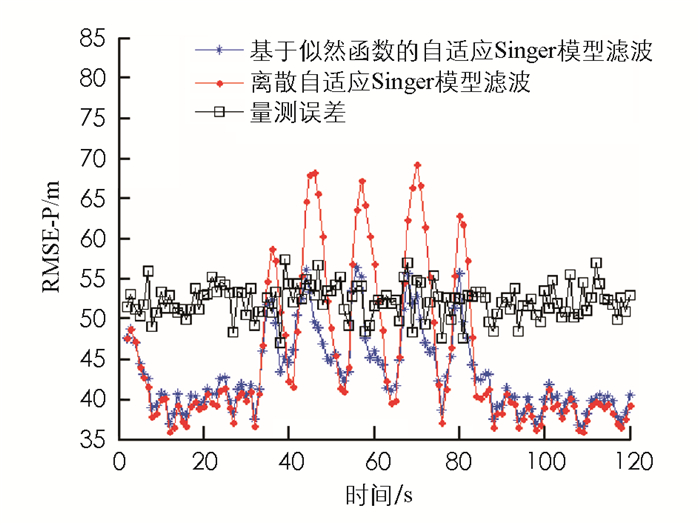
画出基于似然函数的自适应Singer模型滤波及离散自适应Singer模型滤波的位置均方根误差(RMSE-P)曲线(图 3).由图 3可以看出,模型参数基于似然函数调整的自适应Singer模型滤波算法在目标机动时误差较小,参数离散调整的Singer模型滤波算法在目标机动时误差比较大.这是因为离散调整的Singer模型算法当模型的隶属度变化时,会引起参数的突变,以致带来较大的误差.
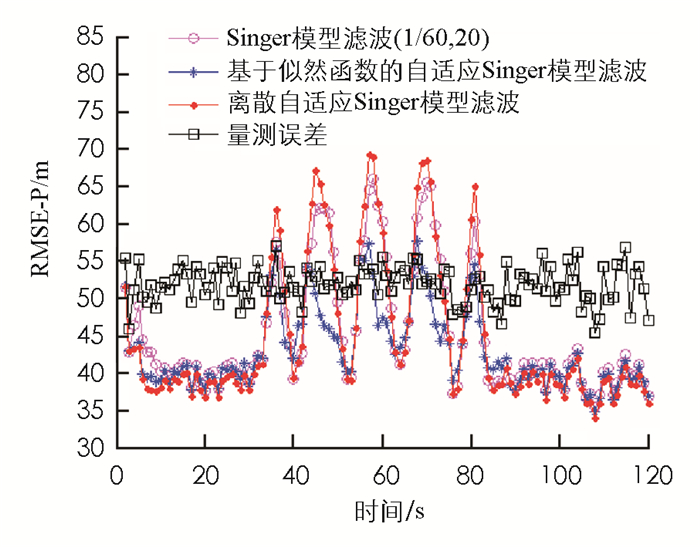
如图 4所示,Singer模型的参数取α=1/60,amax=20时,因为Singer模型的参数更能适应目标机动,Singer滤波误差小,滤波效果较优于离散自适应Singer模型算法.总体而言,参数基于似然函数调整的Singer模型滤波误差最小,滤波效果最好.
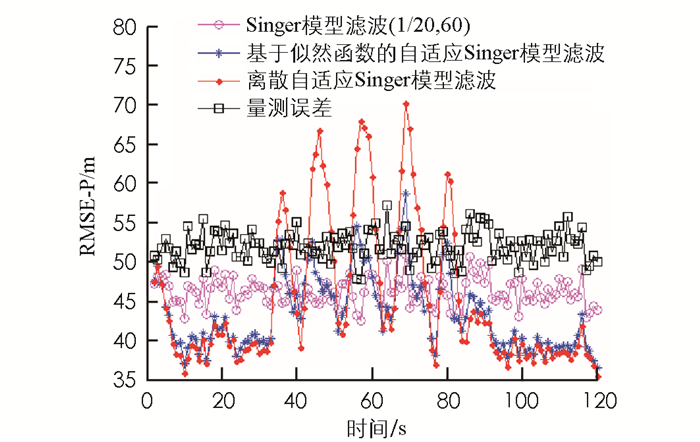
如图 5所示,Singer模型的参数取α=1/20,amax=60时,因为Singer模型的参数与目标的机动匹配,因此目标机动时滤波误差最小,滤波效果优于两种自适应算法.但是,目标在直线运动阶段,Singer模型滤波位置均方根误差(RMSE-P)最大,效果最差.
-
对传统Singer模型滤波算法及本文提到的两种自适应算法进行时效性分析.所有的结果统一在CPU:英特尔酷睿I7-7500U,内存为4 GB的计算机上进行100次蒙特卡洛仿真,对比3种算法运行时间得到的结果见表 1.
-
通过仿真结果可以看出,Singer模型滤波选择不同的模型参数时,滤波效果差异较大.本文提到的两种自适应算法由于没有改变模型的复杂度及模型个数,因此计算量与时效性都与Singer模型相当.当目标机动时,基于似然函数调整的Singer模型滤波效果更好,而离散调整的Singer模型算法当模型的隶属度变化时,引起参数的突变,会带来较大的误差.当目标没有机动时,两种自适应算法效果相近.总体而言,基于似然函数的自适应Singer模型算法性能最稳定,效果最好.
4.1. 仿真场景
4.2. 时效性对比
4.3. 结果分析
-
实际中,往往不能提前预知目标的机动情况,而Singer模型的参数一旦确定,在滤波过程中便不能更改.因此,单一参数的Singer模型难以适应不同的机动类型[10].本文提出了一种基于模型似然函数的自适应Singer模型.通过仿真验证,这种基于似然函数的自适应Singer模型滤波算法能有效跟踪目标不同的机动段.滤波效果比离散自适应Singer模型算法[5]更好,更能适应目标的机动.