


 下载:
下载:
-
制动能量回收技术是摩托车实现节能减排的技术方案之一.国内外对制动能量回收技术的研究主要集中在汽车上:通过采用各种制动能量回收技术,丰田Prius混合动力轿车整车能量利用率提高20%以上[1];本田Insight混合动力轿车获得高效制动能量回收[2];福特并联混合动力电动汽车有效改善了其制动性能[3].目前,摩托车制动能量回收的研究尚处于有深入拓展空间的状态.本文以混合动力三轮摩托车为研究对象,提出通过控制PWM(脉冲宽度调制)占空比来调节制动力大小以实现安全制动与高效制动能量回收,制定了制动能量回收控制策略并通过实验验证了其有效性.
全文HTML
-
本课题研究前提是:三轮摩托车原有汽油机动力系统和机械制动系统保持不变,用装有配套轮胎的永磁无刷直流轮毂电机取代前轮,发动机驱动系统与电机驱动系统相互独立.研究的目标是:设计制动能量回收系统,在保留原有机械制动系统的基础上,利用制动时轮毂驱动电机的发电特性将制动能量部分转换成电能回收到储能装置中,同时产生制动力矩,实现安全制动的目的[4-5].
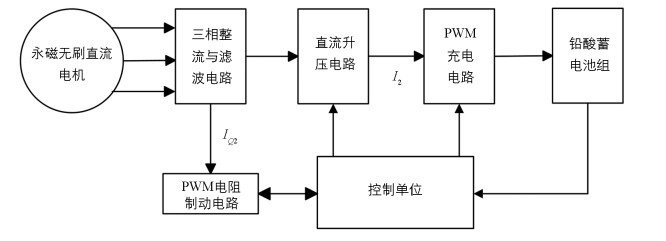
混合动力三轮摩托车制动能量回收系统如图 1所示.电磁制动采用铅酸蓄电池充电制动和电阻制动两种模式.电阻制动用于当电磁制动电流大于蓄电池可接受充电电流时与蓄电池充电制动进行联合制动.
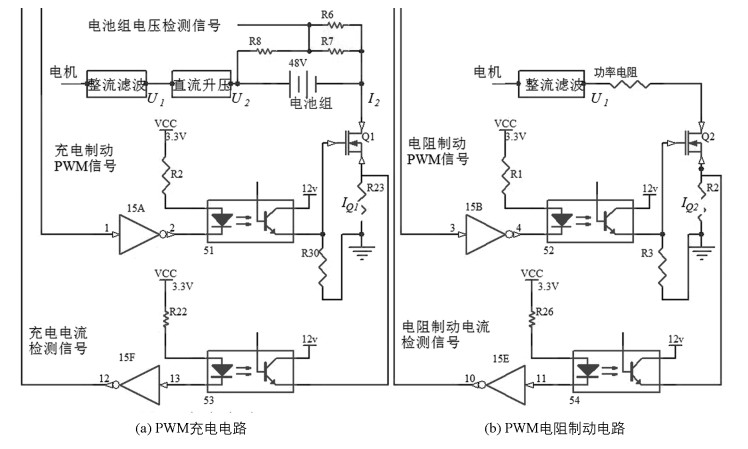
系统电控部分主要包括三相整流滤波电路、直流升压电路、PWM充电电路、PWM电阻制动电路等. PWM充电电路与PWM电阻制动电路如图 2所示.充电电路利用PWM信号控制功率管Q1的导通与截止的时间来控制流过功率管Q1的电流大小;电阻制动电路利用PWM信号控制功率管Q2的导通与截止的时间来控制流过功率电阻的电流大小.为避免大电流窜入控制单元,两电路均采用光电耦合器将控制芯片与大电流回路隔离.
-
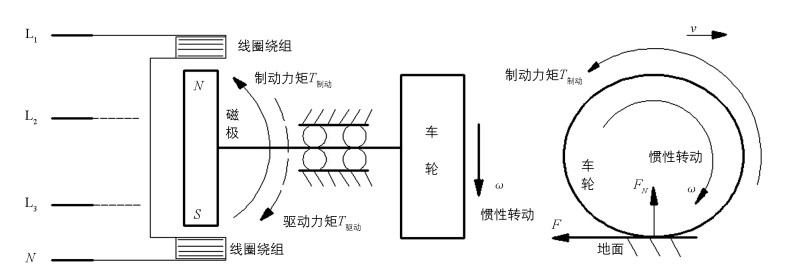
永磁无刷直流轮毂电机电磁制动原理如图 3所示,滚动阻力偶矩忽略不计[6].正常行驶过程中,轮毂驱动电机提供驱动力矩T驱动的方向与车轮转动的方向(图中ω方向)相同,给车辆提供行驶动力.制动能量回收过程中,由于惯性作用,固定在车轮上的轮毂电机磁极将继续转动,此时磁极与线圈绕组发生相对运动.当相线L1、L2和L3之间带上负载,形成闭合回路,由楞次定律知,旋转磁极与线圈绕组之间将产生阻碍其相对运动的制动力矩T制动.制动力矩T制动与车轮转动的方向相反,地面将产生与摩托车前进方向(图中v方向)相反的制动力F[6],从而使摩托车减速.
制动能量回收时,如图 2电路所示,设定发电机发出的三相交流电整流滤波后的电压、电流分别为U1、I1,经过升压电路升压后的电压、电流分别为U2、I2,升压电路转换效率为η;充电电路的PWM占空比为DQ1,转换效率为ηQ1,流过功率管Q1的电流为IQ1;电阻制动电路功率电阻电压为U1,PWM占空比为DQ2,转换效率为ηQ2,流过功率管Q2的电流为IQ2.升压电路与蓄电池组串联,则充电电流为I2,IQ1=ηQ1I2.
根据功率平衡关系得:
由发电电压与电机转速n的函数关系式U1=f(n)与式(1) 得:
忽略其它损耗,I1与电枢电流相等,则
式中:Te为电机电磁转矩,Ke为电磁转矩常数.
IQ1的大小由充电制动PWM的占空比DQ1决定,IQ2的大小由电阻制动PWM的占空比DQ2决定;转速一定时f(n)值一定;升压后U2基本保持不变.因此由式(3) 知,可通过调节PWM占空比DQ1与DQ2来改变电枢电流的大小,从而调节电磁制动力矩的大小,达到制动的目的.其中,能量回收产生的电机电磁转矩为:
能量回收时充电占空比DQ1对电机输出电流和电压的影响实测数据如表 1[7]所示,电压为电机整流滤波电压,电流为整流端的直流电流.由实验数据可得:同一PWM占空比控制下给电池组充电,高转速时,输出电流小,电磁制动转矩小;低转速时,电流大,电磁制动转矩大;电机输出电流随着占空比增大而增大[7].实验结果与式(4) 电磁制动力矩与占空比成正相关结论一致.因此,通过调节PWM占空比来调节制动力大小是可行的.
-
提高制动能量回收率的同时,还要考虑电池的寿命[8-9].影响铅酸电池寿命的主要原因是硫化和活性物质脱落,这两者主要由过充过放和大电流充放电造成.因此,充电过程对蓄电池的寿命影响较大[10-11],需要控制其充电电流.
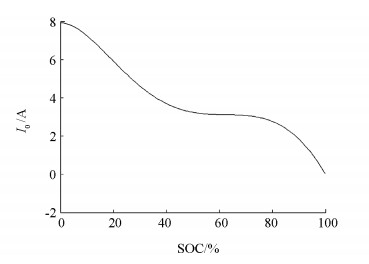
美国科学家马斯在对大量的蓄电池充电过程的数据研究的基础上,提出了以最低析气率为前提的蓄电池可接受的充电电流曲线[12],用下式表示:
式中:I为蓄电池可接受的充电电流;Io为蓄电池初始的可接受的充电电流;a为衰减率常数,a=I0/C,C为需要充电的电池容量;t为充电时间.在实际工作中,可以依据电池的SOC(蓄电池荷电状态)选择最佳I0[12],SOC值在实际应用中可考虑用蓄电池组开路电压确定.结合文献[13]的数据结果,使用最小二乘法拟合可得到不同SOC下的I0,拟合曲线如图 4所示.
电磁制动过程中参考拟合曲线的Io-SOC关系控制充电电流I2大小,使其保持在对应SOC状态下可接受的最大充电电流,以尽可能多地回收制动能量;当充电电流值超过可接受的最大电流时,由式(1) 知,通过提高电阻制动电流IQ2的值来满足功率转化的需求.
-
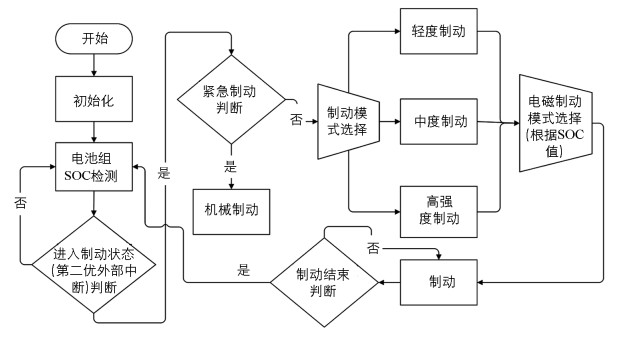
考虑制动安全,需要判断是紧急制动还是非紧急制动,其方法是检测制动操作机构的加速度.紧急制动时直接采用机械制动,但需防止出现侧滑、跑偏和失去转向能力等.非紧急制动时根据制动强度,合理分配电磁制动力矩与机械制动力矩的比例,并将制动能量回收的模式分为轻度制动、中度制动、高强度制动3种模式[7].
1) 轻度制动(制动减速度a<0.5 m/s2),仅使用电磁制动.主要在长下坡,起、停频繁等工况,特点是三轮车随时需减速或需要控制速度,防止超速.
2) 中度制动(制动减速度0.5 m/s2≤a≤2 m/s2),以电磁制动为主,机械制动为辅,需防止前轮抱死现象发生.此时电磁制动系统提供大部分制动力矩,机械制动系统逐渐增加制动力矩,以达到制动目的.
3) 高强度制动(制动减速度a>2 m/s2),以机械制动为主、电磁制动为辅,机械制动提供主要制动力矩.同样需防止车轮抱死现象发生.
制动能量回收控制系统控制流程如图 5所示.在进入制动后,由于需要在制动停止信号产生时能够立即停止制动,将制动停止信号在此时设为最优中断信号.
-
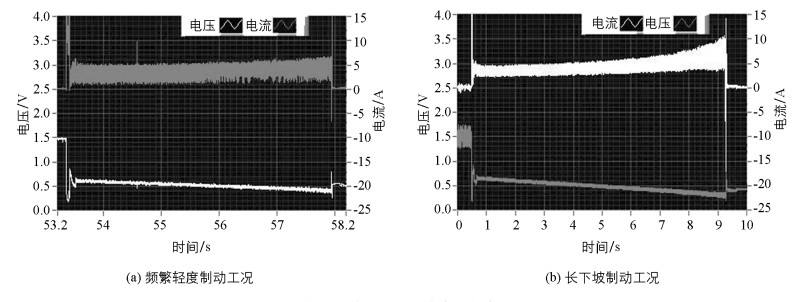
根据控制策略做了轻度、中度和高强度制动试验.混合动力三轮摩托车的永磁无刷直流轮毂电机额定功率为800 W,工作电压为48 V,额定电流为16.7 A,最大扭矩为25.5 N·m;铅酸蓄电池为48 V/20 Ah.不同制动模式实验结果如图 6-图 8所示.实验中蓄电池为低电荷状态,电阻制动电路未参与工作,电磁制动始终处于充电制动状态.图中电流为发电机电枢电流,电压为电机发出的三相交流电整流后的电压经分压的电压值(测试值为实际值的1/30).
-
轻度制动模式实验分频繁轻度制动及长下坡制动两种制动模式.由图 6知,频繁轻度制动能量回收时,电机输出电流较稳定,电压平稳降低,无较大幅度波动,能够提供一个稳定的制动力矩;长下坡制动能量回收时,电机输出的电流略微增加,电压平稳下降,这与制动过程车速逐渐降低状况一致.实验表明,轻度制动能量回收时,系统能够实现平稳制动.
-
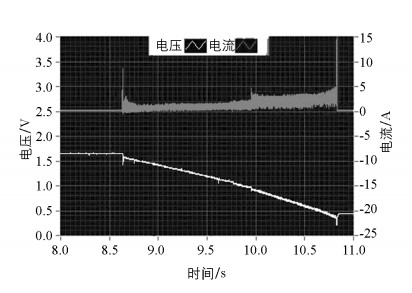
中度制动模式实验结果如图 7所示.与轻度制动能量回收相比,电机的输出电流增大,即制动力矩增大;制动开始瞬间电机电流有较大幅度变化,但整个制动过程电流变化相对平稳,在实验中车身无大幅抖动现象发生.
-
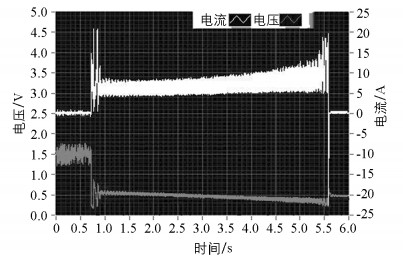
高强度制动模式实验结果如图 8所示,电机输出电流小且平稳,此时电磁制动力矩投入较少,机械制动系统提供较大制定力矩.实验表明,在高强度制动模式时,以机械制动力矩为主、电磁制动力矩为辅,系统能够实现平稳制动.
-
由于影响车辆制动能量回收的因素较多,到目前为止对制动能量回收率的计算仍没严格定义.作者对能量回收率的计算主要考虑制动起点车辆的动能与制动结束点车辆的动能的差值、电机产生的能量、升压电路的转换效率等因素,能量回收率用以下公式计算.
制动能量回收实测数据参见文献[7],在升压电路的转换效率取75%情况下,计算出的能量回收率:轻度制动时为8.1%~9.9%;中度制动时为6.3%~6.8%;高强度制动时为0.4%~0.6%.
5.1. 轻度制动模式实验
5.2. 中度制动模式实验
5.3. 高强度制动模式实验
5.4. 能量回收率计算
-
通过对混合动力汽车制动能量回收方案和电磁制动力大小调节的分析,制定出考虑电池组SOC值的轻度制动、中度制动和高强度制动等模式下的制动能量回收控制策略,并在混合动力三轮摩托车上完成相关实验.实验结果表明,该制动能量回收策略实现了混合动力三轮摩托车平稳制动,能量回收效率达到6.3%~9.9%(高强度制动模式除外).因此,三轮摩托车制动能量回收控制系统能够在安全制动的同时回收部分能量,对摩托车的节能减排具有实用意义.