


 下载:
下载:
-
SIT是对抗蚊子传播疾病的最有效武器,并在实验室研究中表现出很大前景,而且部分文献已经应用数学模型研究SIT技术对野生蚊子控制的影响[1-6].特别地,文献[4]在假设蚊子种群具有弱Allee效应的条件下建立了包括野生蚊子和绝育蚊子的二维动力学模型,研究了不同的绝育蚊子的释放策略对系统动力学性态的影响.弱Allee效应是指当种群的密度过于稀疏时,增长率会变小,但不会出现负增长的情况.当种群具有强Allee效应时,若它的密度小于某个临界值,则种群将出现负增长率.本文考虑野生蚊子种群具有强Allee效应,同时假设其按照logistic增长[7],构造出如下包括野生蚊子和绝育蚊子的连续时间动力学模型:
其中:w(t)和g(t)分别代表t时刻野生蚊子和绝育蚊子的数量;N=w+g,C(N)代表单位时间内蚊子相互交配的次数;a为每次交配后所产生的野生后代蚊子的数量;k为环境最大容纳量;m是反映Allee效应强度的参数,这里假设0<m<k;μ1和μ2分别为野生蚊子和绝育蚊子的自然死亡率;B(·)为绝育蚊子的释放策略函数.本文考虑C(N)=c,c为常数,并把c和a合并为a,且假设a>μ1,否则在没有释放绝育蚊子条件下野生蚊子也将灭绝.
全文HTML
-
假设在模型(1)中对绝育蚊子采取常数释放策略,即有B(·)=b0,则可得如下相应动力学模型:
定义集合Ω1:
容易验证Ω1是系统(2)的正不变集,因而本节下面的分析都将在Ω1内进行.
-
容易得到系统(2)存在一个边界平衡点E0(0,g0),其中
$ {g^0} = \frac{{{b_0}}}{{{u_2}}}$ .系统(2)的正平衡点满足由(3)式可以得到
则有
令
则当a≤β时,F′(w)≥0,知F(w)为单调递增函数.又由F(0)>0,
知此时系统(2)没有正平衡点.
当a>β时,存在w2>w1>0,使得
其中
容易验证w1,w2分别为F(w)极大值和极小值点.定义
当F(w2)>0,即
${b_0} > \tilde b $ 时,系统(2)没有正平衡点;当F(w2)=0,即${b_0} = \tilde b $ 时,系统(2)有且仅有一个正平衡点E(w2,g0);当F(w2)<0,即${b_0} < \tilde b $ 时,系统(2)有两个正平衡点$ {E_1}({{\bar w}_1}, {\rm{ }}{g^0})$ 和$ {E_2}({{\bar w}_2}, {\rm{ }}{g^0}), {{\bar w}_1} < {w_2} < {{\bar w}_2}$ .则我们可得如下结果.定理1
$\left( ⅰ\right) $ 当a≤β时,系统(2)有且仅有一个边界平衡点E0(0,g00),无正平衡点.$\left( ⅱ\right) $ 当a>β,${b_0} > \tilde b $ 时,系统(2)有且仅有一个边界平衡点E0(0,g00),无正平衡点.$\left( ⅲ\right) $ 当a>β,${b_0} = \tilde b $ 时,系统(2)存在一个边界平衡点E0(0,g00)和一个正平衡点E(w2,g00).$\left( ⅳ\right) $ 当a>β,$ b_0 < \tilde b$ 时,系统(2)存在一个边界平衡点E0(0,g00)和两个正平衡点E1(w1,g00),${E_1}({{\bar w}_1}, {\rm{ }}{g^0}), {E_2}({{\bar w}_2}, {\rm{ }}{g^0}) $ . -
系统(1)在E0处的雅可比矩阵为:
由于J0的特征值为-μ1<0,-μ2<0,因此E0是局部渐进稳定的.特别地当a≤β时,E0(0,g00)是系统(2)唯一的平衡点,可知此时E0是全局渐进稳定的;类似地,当a>β,
${b_0} > \tilde b $ 时,E0也是全局渐进稳定的.下面讨论正平衡点的稳定性.对于a>β,
$ {b_0} < \tilde b$ ,系统(1)在正平衡点处的雅可比矩阵为:其中
经计算可得J1的行列式为:
由
$F({{\bar w}_1}) = 0, {F^\prime }({{\bar w}_1}) < 0 $ ,有detJ1(E1)<0,从而知平衡点E1是个鞍点.由
$ F({{\bar w}_2}) = 0{\rm{, }}{F^\prime }({{\bar w}_2}) > 0$ ,有detJ1(E2)>0;从而由-μ2<0知a11<0,得trJ1(E2)<0,知平衡点E2是局部渐进稳定的.对于a>β,
${b_0} = \tilde b $ ,系统(2)存在一个边界平衡点E0(0,g00)和一个正平衡点E(w2,g00),由F(w2)=0,F′(w2)=0,有detJ1(E)=0,从而可得J1(E)的特征值为a11=0,-μ2<0,从而知平衡点E是局部稳定的.最终我们得如下定理2.定理2 设系统(2)满足初始条件(w(0),g(0))≥(0,0),则下面结论成立.
$\left( ⅰ\right) $ 边界平衡点E0是局部渐进稳定的.$\left( ⅱ\right) $ 当a>β且$ {b_0} > \tilde b$ 或a≤β时,边界平衡点E0是全局渐进稳定的.$\left( ⅲ\right) $ 当a>β,${b_0} = \tilde b $ 时,正平衡点E是稳定的.$\left( ⅳ\right) $ 当a>β,$ {b_0} < \tilde b$ 时,正平衡点E1是个鞍点,E2局部渐进稳定.从定理2可见,当a>β,
$ {b_0} < \tilde b$ 时,系统存在双稳定现象.当绝育蚊子释放率充分大($ {b_0} > \tilde b$ )时,野生蚊子种群一定会灭绝;当绝育蚊子释放率小于某个阈值($ {b_0} < \tilde b$ )时,野生蚊子种群是否会灭绝取决于初始条件. -
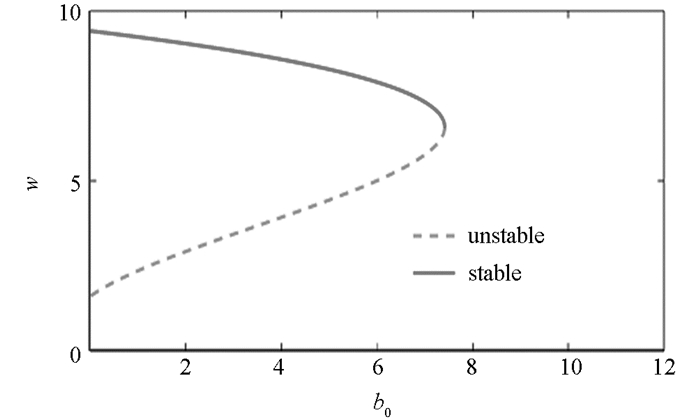
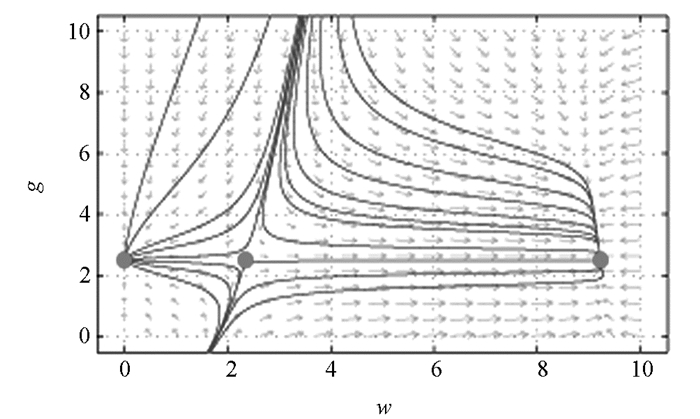
取定参数为a=1,μ1=0.5,μ2=0.4,m=1,k=10,可得系统(2)关于参数b0的分支图,其中b=7.413.取定b0=1,借助pplane软件得到系统(2)的平面相图.
当
$ {b_0} > \tilde b$ 时,系统(2)只存在唯一渐进稳定的边界平衡点E0;当$ {b_0} < \tilde b$ 时,除局部渐进稳定的边界平衡点E0外,系统还存在两个正平衡E1和E2,其中E2局部渐进稳定,E1是个鞍点,即这时系统(2)存在双稳定现象.当b0=1时,在平面相图中边界平衡点E0=(0,2.5),正平衡点E1=(2.349,2.5),E2=(9.227 7,2.5).
1.1. 平衡点的存在性
1.2. 平衡点的稳定性
1.3. 数值模拟
-
假设在模型(1)中对绝育蚊子采取比例释放策略,即有B(·)=b1w,则相应系统为:
定义集合Ω2
容易验证Ω2是系统(4)的正不变集,因而本节下面的分析都将在Ω2内进行.
-
参考文献[8],我们假设F(0,0)=G(0,0)=0,从而知F(w,g)与G(w,g)在{(w,g):w≥0,g≥0}上是连续的.在下文中总是假设初始条件w(0)>0,g(0)>0成立.
系统(4)的正平衡点满足
由(5)式可以得到
定义判别式
当Δ<0,即
时,系统(4)没有正平衡点.当Δ=0,即
时,系统(4)有且只有一个正平衡点E*(w*,g0*),其中
若Δ>0,即
时,系统(4)有两个正平衡点E1*(w1*,g1*)和E2*(w2*,g20*),其中
定义
我们得到如下定理.
定理3
$\left( ⅰ\right) $ 当${b_1} > \bar b $ 时,系统(4)无正平衡点.$\left( ⅱ\right) $ 当${b_1} = \bar b $ 时,系统(4)有且只有一个正平衡点E*(w*,g0*).$\left( ⅲ\right) $ 当$ {b_1} < \bar b$ 时,系统(4)存在两个正平衡点E1*(w1*,g1*)和E2*(w2*,g20*). -
在(0,0)处,由于第一个方程分母为零,我们无法研究其线性稳定性.如果假设0<w(0)<m,则有
知
所以对
$\forall \varepsilon > 0, \exists T $ ,当t>T时,有w<ε,也就有从而由g(0)>0和比较原理知
我们可以得到如下结果.
定理4 设系统(4)初始条件满足0<w(0)<m和g(0)>0,有
下面讨论正平衡点的稳定性.当
$ {b_1} < \bar b$ ,可以得到系统(4)关于正平衡点的雅可比矩阵:经计算可得J2的行列式为:
容易验证当
$ {b_1} < \bar b$ 时,且
从而有detJ2(E1*)<0,detJ2(E2*)>0.知平衡点E1*是个鞍点.又由矩阵J2的迹为:
其中
从而可得如下定理5.
定理5 假设
$ {b_1} < \bar b$ .正平衡点E1*是个鞍点;当A(E2*)>0时,E2*是个局部渐进稳定的平衡点.当
$ {b_1} = \bar b$ 时,G(w*)=0,且从而有
知J2有0特征值.因而当A(E*)>0时,即trJ2(E*)<0时,知E*是稳定的.从而可得如下定理6.
定理6 假设
${b_1} = \bar b $ ,当A(E*)>0时,E*是个局部稳定的平衡点. -
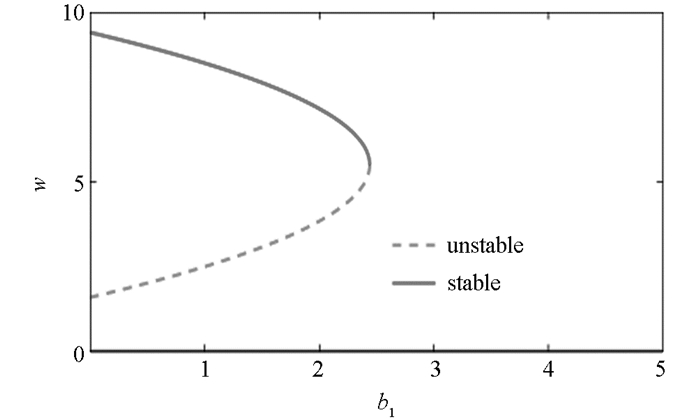
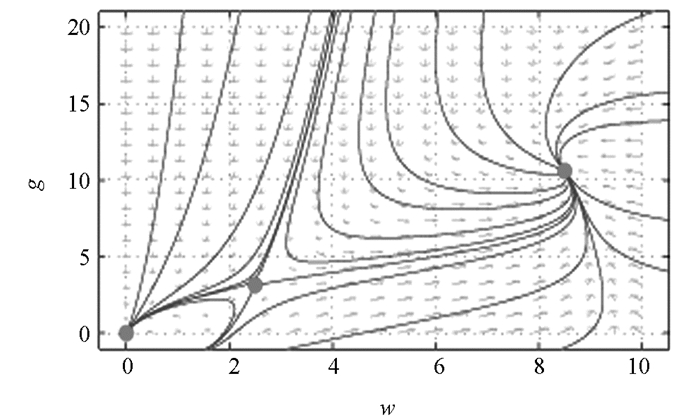
为了验证上述理论分析,我们取定参数为a=1,μ1=0.5,μ2=0.8,m=1,k=10,可得系统(4)关于参数b1的分支图,其中b=2.44.取定b1=1,得到系统(4)的平面相图.
可见当
$ {b_0} = \bar b$ 时,系统只有(0,0)平衡点;当$ {b_0} < \bar b$ 时,这时系统会出现双稳定现象,即(0,0)和E2*都是局部渐进稳定的.在平面相图中,平衡点(0,0)是局部渐进稳定的,正平衡点E1*=(2.5,3.125)是个鞍点,E2*=(8.5,10.625)是局部渐进稳定的.
2.1. 平衡点的存在性
2.2. 平衡点的稳定性
2.3. 数值模拟
-
绝育昆虫技术应用于控制或根除野生蚊子在理论和实践当中都被证明是有效的.然而不同释放策略的选择和相应效果的评估是困难的.在本文中,我们在具有logistic增长和强Allee效应的蚊子种群中引入了绝育昆虫释放技术,建立动力学模型,讨论了常数释放和比例释放策略条件下野生蚊子种群的动力学行为.通过研究平衡点的存在性和稳定性,我们在两种释放策略条件下都得到了一个临界释放系数
$ {\tilde b}$ 和${\bar b} $ .我们发现在两个系统(2)和(4)中,当绝育蚊子释放系数充分大时,能够导致野生蚊子种群的灭绝;当释放系数较小时,两个系统都会出现双稳定现象,也即是说野生蚊子是否灭绝取决于初始条件的大小.上述研究结果为我们使用绝育昆虫技术控制或根除野生蚊子提供了有意义的理论指导.