


 下载:
下载:
-
语音信号是非常常见的一种信号,它是交流和通信的重要工具,因此,语音信号处理[1]在日常生活中的应用非常广泛,而麦克风阵列[2]在语音信号处理中有着重要的作用,比如在助听器、手机设备、语音识别、视频会议等实际应用中普遍使用.它的应用主要分为两方面:语音信号增强[3-4]和声源定位[5].
由于声源与麦克风阵列的距离不确定,因此分为近场与远场2种环境,近场环境主要研究的是麦克风阵列所处的位置、声源的位置与语音信号频率之间的信息;而远场环境主要研究的是语音信号的传入角度与语音信号频率之间的信息.由于主要考虑的要素不同,因此,麦克风阵列中的传递函数也是不同的,近场环境的传递函数在许多已有的文献中可以找到,但是远场环境的传递函数需要根据具体情形来确定.本文主要基于远场环境进行研究.
麦克风阵列波束形成设计[6-9]是语音信号处理中的一个重要途径,它通过指定通带区域和阻带区域来实现区分信号与噪声的功能.关于波束形成最优设计,目前有若干快速并有效的方法,如文献[10-13]通过把问题转化为半无限规划问题,从而实现快速求解.为了提高波束形成的设计性能,通过优化麦克风的位置也是一种手段,如文献[14-18]通过建立麦克风摆放设计问题来优化波束形成的设计.但是当滤波器长度非常大时,这些方法都会导致比较严重的吉布斯现象,当一些参数发生变化时,通带区域或阻带区域会转移到过渡带区域,导致性能变得非常差,所以它的鲁棒性设计非常差.因此,我们需要考虑它的光滑过渡带设计,使得它能保持好的鲁棒性要求.对此,本文提出了一种新的消除吉布斯现象的方法.
全文HTML
-
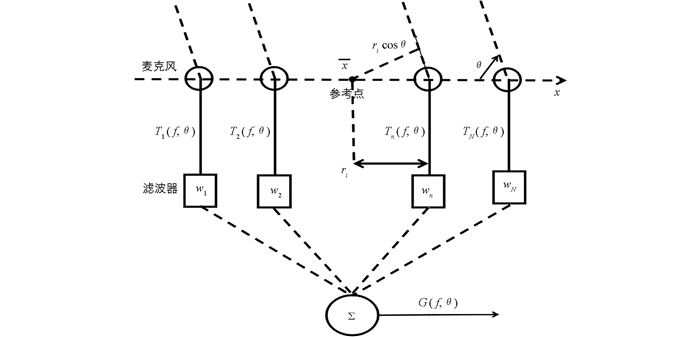
我们考虑一个含N个元素的麦克风阵列.如图 1所示为远场情形下的麦克风阵列结构图,对于每一个麦克风,后面接一个长度为L的有限脉冲响应(FIR)滤波器,那么麦克风阵列的频率响应函数为
其中,f是信号频率,Ri(f)表示第i个麦克风后面的FIR滤波器的频率响应,即
其中,wi为有限脉冲响应滤波器的系数,且
这里j是虚数单位,g0(f)表示滤波器的延迟,fs为抽样频率.
在远场环境下,麦克风阵列的传递函数为
其中
且ri是第i个麦克风到参考点位置的距离;c是语音在空气中的传播速度.公式(2)表示频率为f,入射方向为θ的信号相对于参考点的频率响应的变化.那么麦克风阵列的实际响应函数为
在实际应用中,我们可以规定通带区域和阻带区域,然后目标响应函数可表示为
其中,Gd(f,θ)是定义在Ω=Ωp∪Ωs这个区域上的;Ωp是通带区域;Ωs是阻带区域;τL表示的是与L相关的延迟参数,且τL∈[0,L-1],它与系统的相位有关.那么,麦克风阵列的波束形成的设计问题就可转化为滤波器的系数设计,使得输出的实际响应函数G(f,θ)逼近目标响应函数Gd(f,θ).采用最大值误差时,目标函数表示为
这里ρ(f,θ)为正的权重函数,它衡量着通带区域与阻带区域的重要性.
令w=[w1,w2,…,wN]T,波束形成设计问题就是找出滤波器系数w∈RNL,使得目标函数(5)的值达到最小,这个问题可以等价为一个半无限规划问题,如下所示:
其中
可以看出问题(6)是凸的,它的最优解是能保证的,该问题可以通过一些半无限规划、二阶锥规划或正半定规划的方法进行求解.
-
对于问题(6)的设计,如果滤波器的长度比较小时,波束形成问题的性能比较差.为了得到一个较好的性能,通常需要把滤波器的长度设得比较大,然而当滤波器长度变大时,在通带区域与阻带区域的端点处会出现振荡很大的现象,这种现象称为吉布斯现象.一般来说,吉布斯现象是在反傅里叶变换的计算过程中,用有限项近似无限项,从而丢失原信号中的高频部分所致.
通常,由于目标函数只考虑了通带区域和阻带区域,实际响应函数在过渡带区域的性能值是不受影响的,但是由于模型具有一定的不确定性和一些随机干扰性,如麦克风的位置测量不精确,声音速度的变化等.因此,实际响应函数的幅度值在通带区域或阻带区域会发生一定的变动,这导致过渡带区域会出现严重的振荡现象,使得原波束形成设计的性能变得非常差.
由于实际响应函数在所有区域上都有定义,但目标响应函数只定义在通带区域和阻带区域.因此,实际响应函数在过渡带区域振荡是因为目标响应函数的定义不完整,在过渡带区域无法控制.那么,为了加强波束形成设计的鲁棒性,过渡带区域上最好有光滑的实际响应函数,这就需要在过渡带区域也先定义一个平滑的目标响应函数.
考虑区域Ω,它可以按照频率分解为
其中对每一个频率f,Ωf是Ω中相对应于f的空间域.考虑到可能存在某些频率f使得Ωf为空集,我们记IΩ为[0,fs/2]中所有Ωf≠Ø的频率f的集合.那么过渡带区域相对应的频率在区间[0,fs/2]里,但不在集合IΩ里.
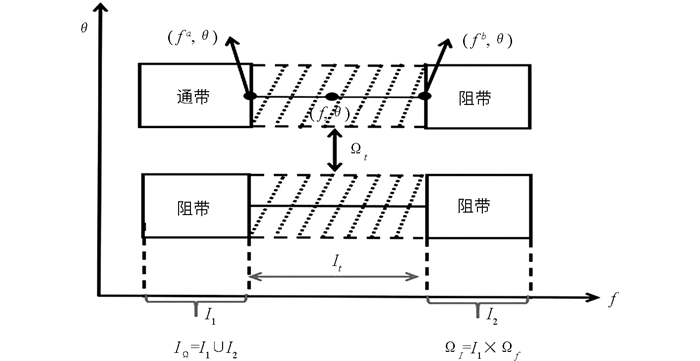
图 2所示为过渡带区域的描述图.我们把频率所对应的过渡带区域的集合记为It,那么It×Ωf就是过渡带区域,记为Ωt.当f∈It时,在过渡带区域It×Ωf里定义一个平滑的目标响应函数,并且实际响应的性能在研究区域内不受影响.因此对于给定一个点(f,θ)∈It×Ωf,我们令It是由端点属于IΩ的若干个开区间组成.假设(f,θ)两边的2个端点记为(fa,θ)和(fb,θ),那么通过在这2个点做一个插值函数,我们就可以在(f,θ)里定义一个新的目标响应函数值.为了保证其光滑性,插值函数需要保证目标响应函数是连续的.插值函数的选择是非常多的,最方便的选择就是线性插值函数,即
由于权重函数可以衡量频域空间的重要性,因此我们需要在过渡带区域定义权重函数,一个恰当的权重函数值在过渡带区域中应该不大于研究区域Ω的值.对于∀f∈It,我们通过在(f,θ)里定义目标响应函数,则可建立一个光滑过渡带设计问题
其中
该问题等价于优化一个最大化目标函数
1.1. 远场波束形成设计
1.2. 光滑过渡带设计
-
光滑过渡带设计问题(8)的约束比问题(6)的约束多,当给定一个滤波器长度L时,问题(8)的最优解必定是问题(6)的可行解.因此光滑过渡带设计问题的最优解不会优于问题(6)的最优解,但是在某些情况下,问题(8)的最优解可以达到问题(6)的最优解.
当滤波器长度为L时,记zL*和zL*′分别是问题(6)和问题(8)的最优性能值,取
$\inf\limits _{L} z_{\mathrm{I}}^{*}$ 和$\inf\limits _{L} z_{\mathrm{L}}^{*}$ 分别是这2个问题的性能极限值.令w*mL是滤波器长度为L时问题(8)的最优解,对于问题(8),记令w*oL是滤波器长度为L时问题(6)的最优解,对于问题(6),记
我们需要比较问题(6)和(8)在研究区域Ω中最优性能值的极限,即需要比较
$\inf\limits _{L} z_{L}^{*}$ 和$\inf\limits _{L} z_{L}^{* \prime}$ .由问题(6)的最优性和等式(9)可知若满足一些约束条件,(14)和(15)的不等式将变成等式.首先,我们给出以下引理和定理.
引理1 若
$z^{* t}(L) \leqslant z^{* s}(L)$ ,则$z^{*}(L)=z^{* \prime}(L)$ .证 因为问题(8)的最优解w*mL比w*oL好,即
则由(14)和(16)式有z*(L)=z*′(L).
定理1 在求解出滤波器系数w的条件下,假设R*oL是一致有界的,即∃M>0,对任意的L和任意的f∈Ωt,有R*oL≤M.若∃ρ0>0,且权重函数在过渡带区域满足ρ(f,θ)≤ρ0,则
证 对任意滤波器长度L,目标函数在过渡带区域可表示为
设ρ0=(zL*/D)1/2,则
则由引理1,有
上式对L取下确界,可得(17)式.
一般地,当滤波器长度L固定时,z*s′(L)和z*s(L)的下确界达不到,但肯定存在一个子序列{L(k):k=1,2,…},使得z*(L(k))和z*s′(L(k))的极限分别为z*s(L)和z*s′(L)的下确界.为了方便起见,不妨假设{L:L=1,2,…}自身是收敛的子序列,则有
定理2 假设(18)式的条件成立,则对∀ε>0,存在一个滤波器的长度为L′,当滤波器长度为L′,并且滤波器系数为wL'时,使得
其中,zs(L)和zt(L)是(12)式和(13)式中w*oL被wL代替后的取值.
证 对∀ε>0,存在滤波器的长度L0,使得当∀L1
$ \ge $ L0时,有为了证(19)式,分两种情况:
第一种情况:假设z*s′(L1)≤z*(L1),取L'=L1,设wL'=w*mL',则
则(19)式成立.
第二种情况:z*s′(L1)>z*(L1),记问题(6)和(8)的最优解分别为w*oL1和w*mL1,相应的频率响应函数分别记为R*o(f)和R*m(f),则定义一个新的频率响应函数为
其中,g是一个连接It\I'和IΩ的过渡函数,I'∈It,并且包括了IΩ端点附近的部分.令fa,fb是IΩ的端点,并且It=(fa,fb).又z*s′(L1)>z*(L1),则
由于函数H关于f是连续的,那么存在η>0,使得(fa,fa+η)∈It,有
其中,I'=(fa,fa+η),为了保证R(f)的连续性,则函数g应为线性函数,故g定义为
对函数g(R*o(f),R*m(f)),当f∈I'时,记
则新的频率响应函数R(f)满足
由于R(f)是连续的,因此可通过反傅里叶变换计算相应的系数w'.记相应的频率响应函数为RL'(f),由于目标函数关于频率响应函数是连续的,则可取滤波器的长度L'充分大,使得RL'(f)非常接近R(f)且满足
结合(20)式和(23)式,则(19)式可证.
故通过定理2可知,当L增大时,问题(8)的实际响应均满足研究区域和过渡带区域.
-
本文麦克风阵列的光滑过渡带区域设计的例子中,麦克风线性阵列的位置为{-0.2,-0.15,-0.10,…,0.10,0.15,0.2},它共包括了9个麦克风.这里延迟参数为τL=(L-1)/2,声音传播的速度为c=340.9 m/s,抽样频率为fs=8 kHz,权重函数恒为ρ(f,θ)=1.参考点设定为麦克风阵列的中心位置,即将第5个麦克风作为参考点.
阻带区域设定为
通带区域设定为
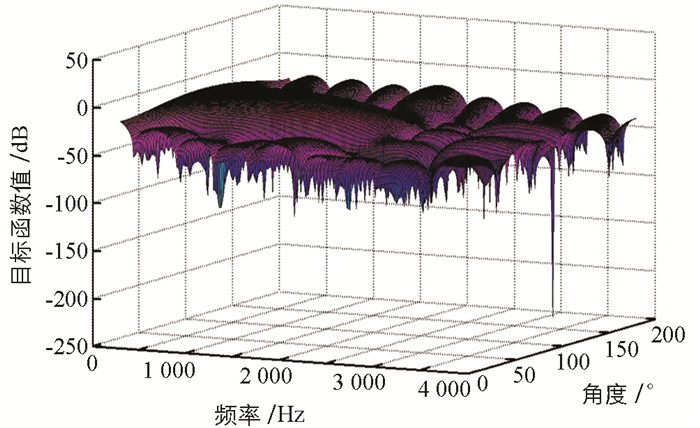
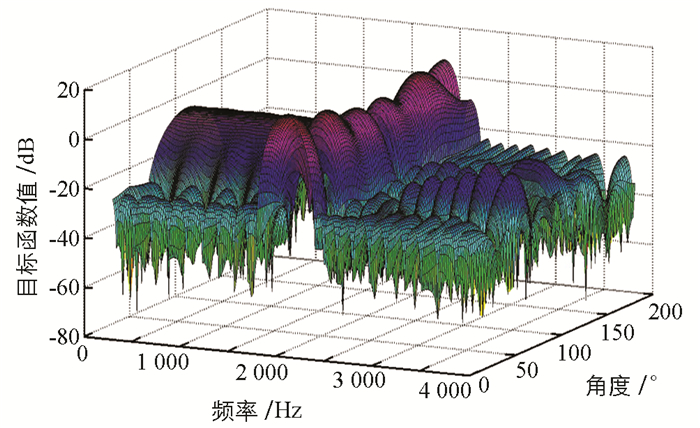
由图 3~图 5可知,当滤波器的长度为10,20,40时,可以求出问题的最优性能值分别为-6.534 7 dB,-12.639 2 dB,-21.411 2 dB.当滤波器的长度比较大时,波束形成的性能不断增强,然而在通带区域与阻带区域的端点处出现振荡很大的现象.由图 3可见,当滤波器长度为10时,几乎没有振荡;由图 4可见,当滤波器长度为20时,出现了一点振荡现象;由图 5可见,当滤波器长度比较大时,实际响应函数在过渡带区域的吉布斯现象非常明显.
为了消除吉布斯现象,需要建立光滑过渡带设计问题.为此,我们在过渡带区域定义一个光滑目标响应函数
其中
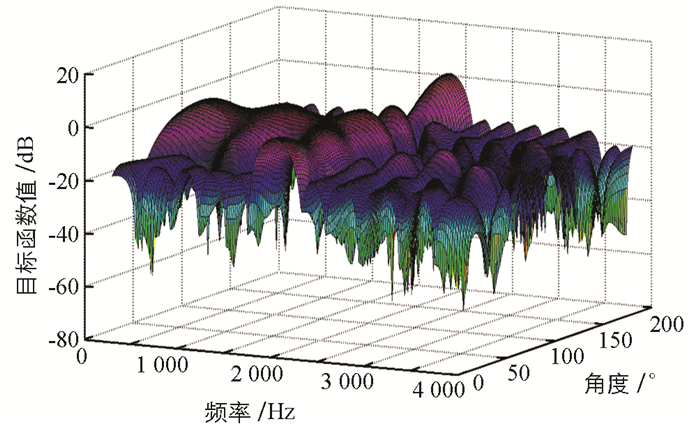
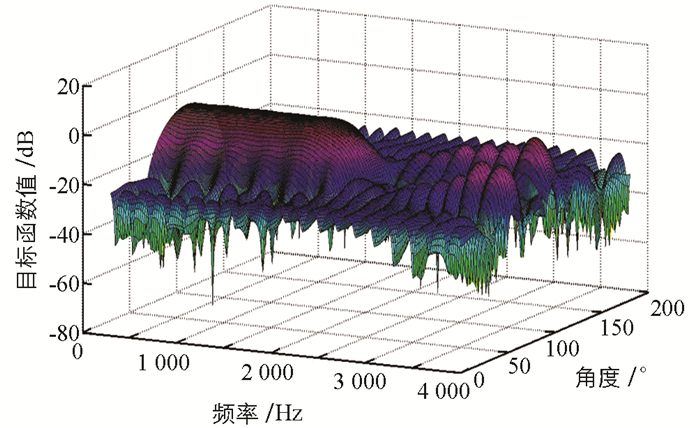
接着对光滑过渡带设计问题求解,求出滤波器长度为40的最优性能值为-21.083 8 dB,与波束形成设计问题中滤波器长度为40的最优性能值-21.411 2 dB非常接近.当滤波器长度为40时,它的实际响应函数如图 6所示,可以发现它在过渡带区域非常平稳光滑,并且吉布斯现象得以消除.
-
本文研究波束形成问题的光滑过渡带设计问题,得出以下结论:
1) 滤波器长度增大时,远场麦克风阵列波束形成问题在过渡带区域出现振荡现象.
2) 对区域进行分解,采用了插值函数,引进了目标响应函数在过渡带区域的平滑定义,从而建立了一个改进的波束形成设计问题,消除了过渡带区域的振荡现象.
3) 当滤波器长度逐渐增大时,波束形成设计与光滑过渡带设计的最优性能值的变化很逼近.