-

图 1 二维障碍物激光图
-
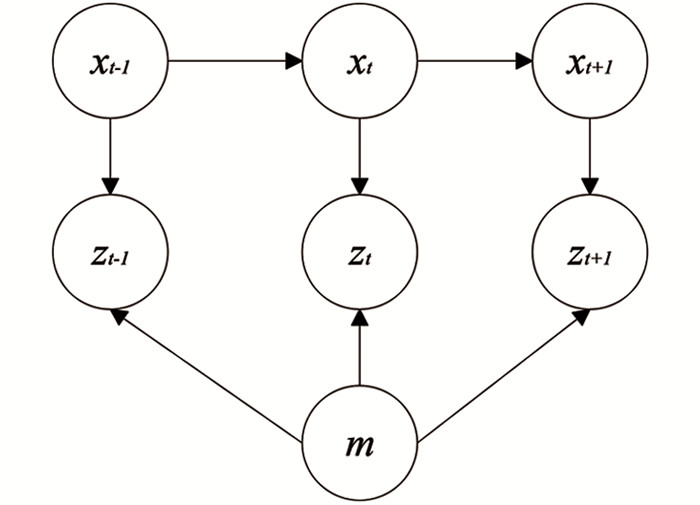
图 2 位姿已知的栅格图构建模型
-
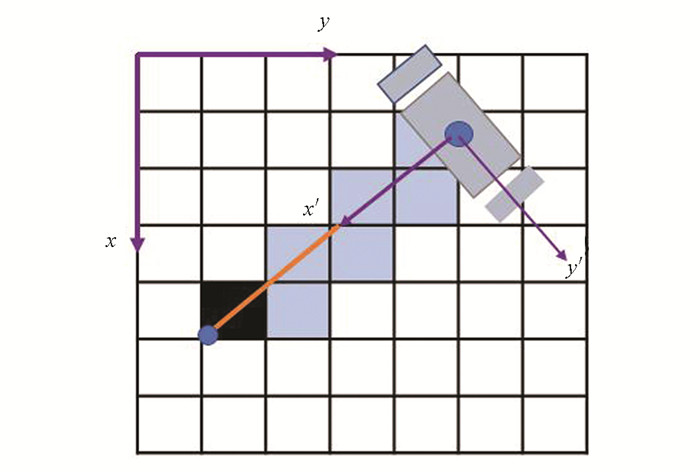
图 3 Bresenham's算法示意图
-
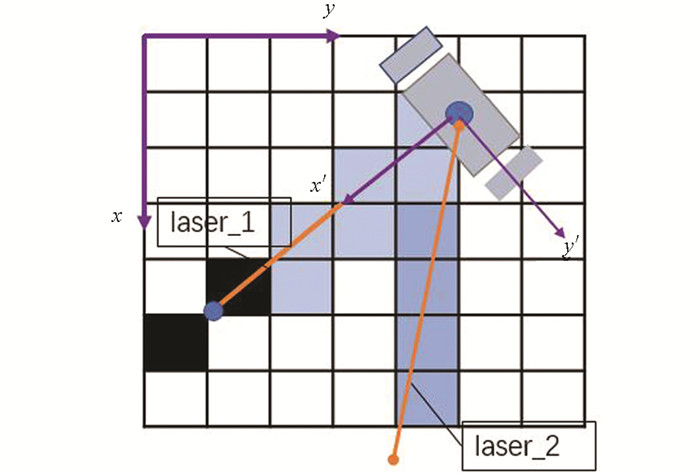
图 4 改进的反演模型
-
图 5 坐标转换示意图
-
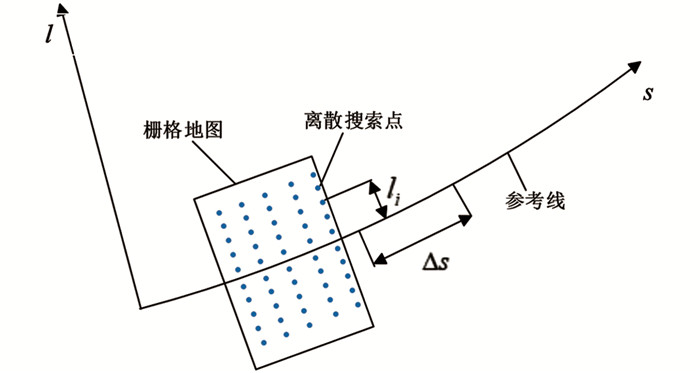
图 6 参考线为基础的s-l坐标系
-
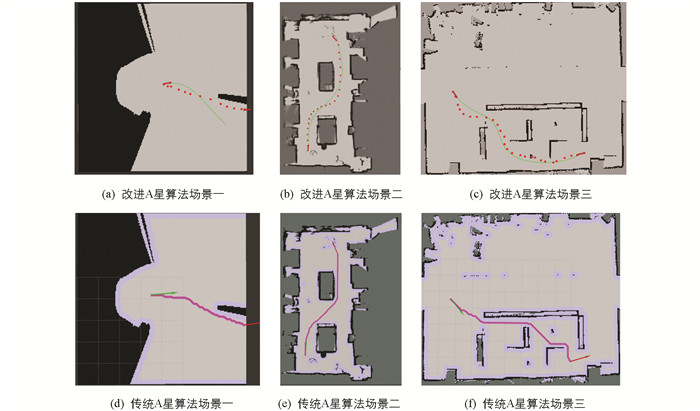
图 7 改进A星与传统A星算法在3种场景中的仿真结果
-

图 8 无人履带车驾驶平台
-
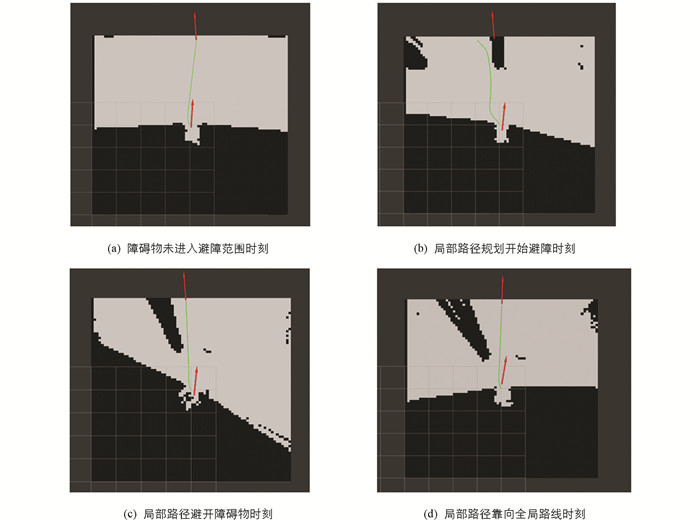
图 9 试验避障效果图
-

图 10 实车试验环境卫星图
-
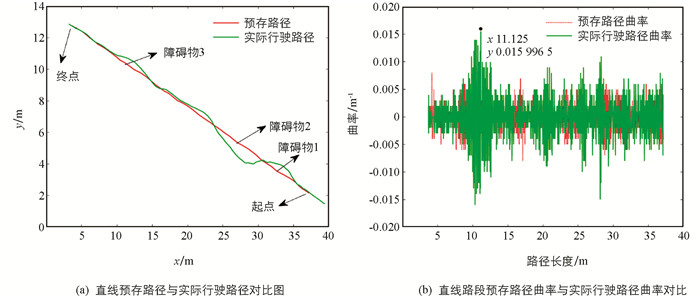
图 11 直线路段实际行驶路径与路径曲率图
-

图 12 曲线路段实际行驶路径与路径曲率图
Figure
12 ,Table
2 个