-
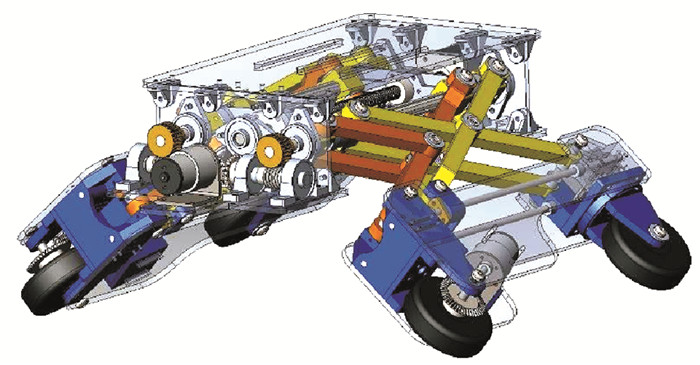
图 1 管道机器人模型
-
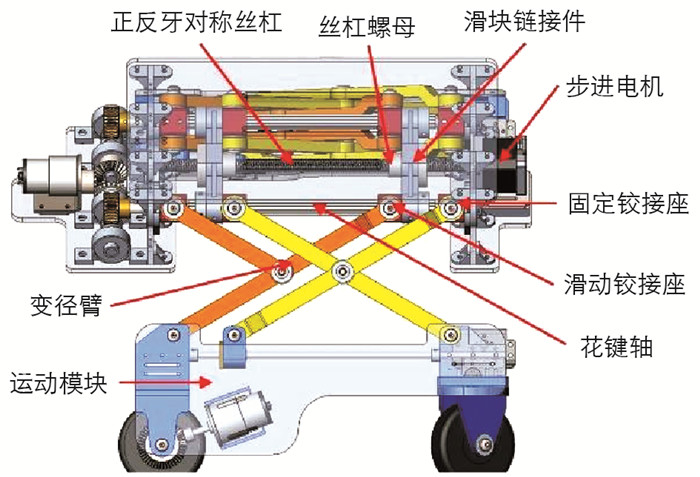
图 2 管道机器人变径机构模型
-
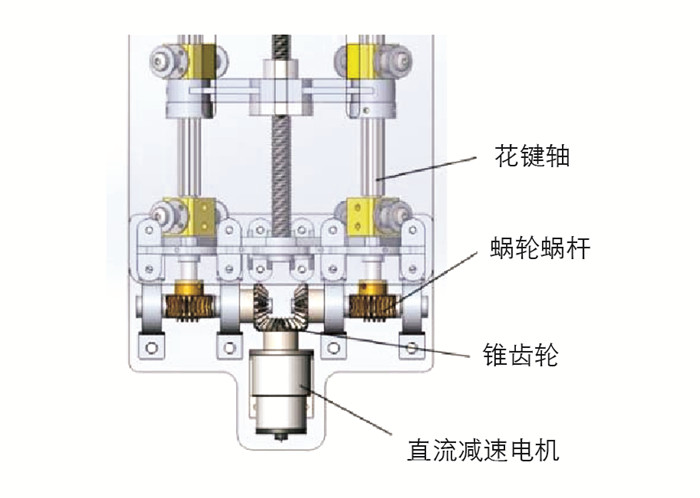
图 3 管道机器人模块偏转机构模型
-
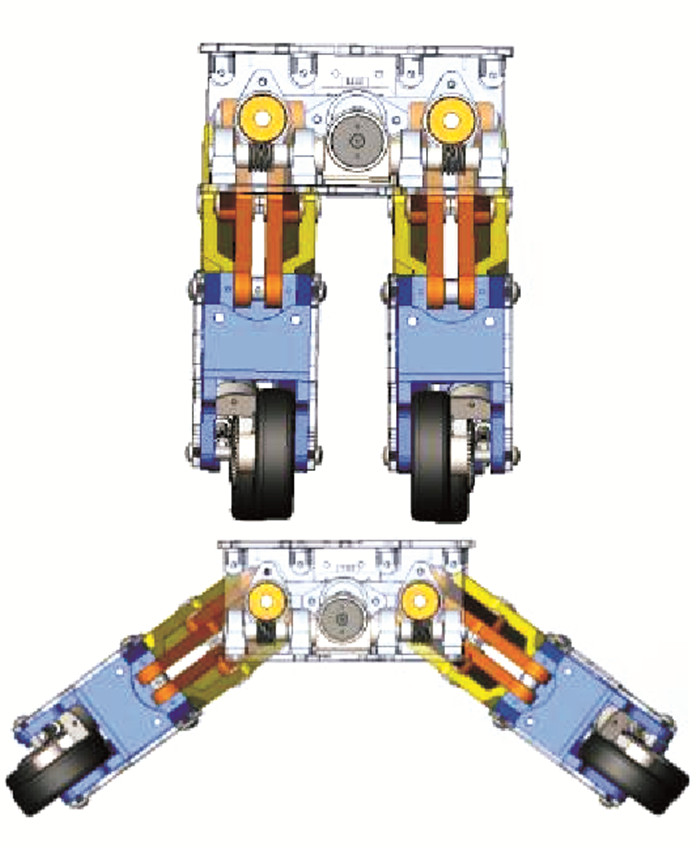
图 4 运动模块偏转后不同位姿示意
-
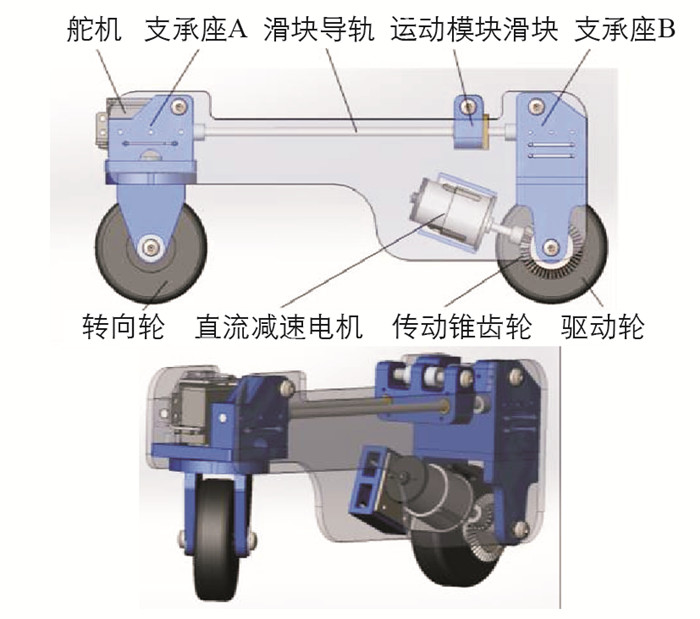
图 5 管道机器人运动模块模型
-
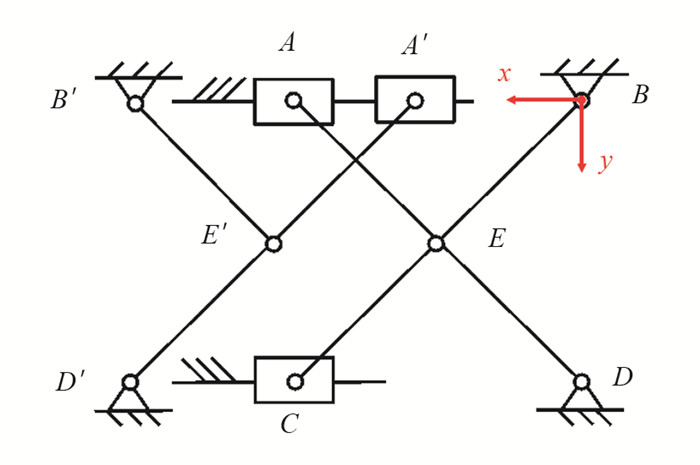
图 6 剪叉式变径机构分析
-
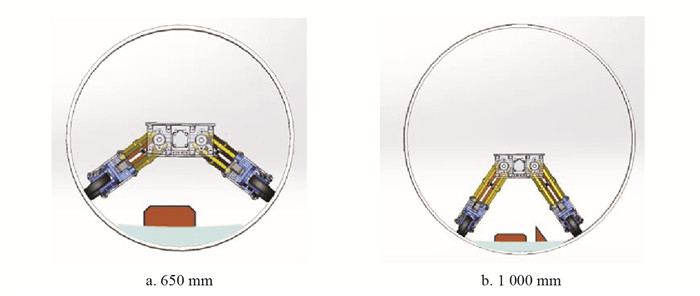
图 7 在直径612 mm以上的管道内机器人行进示意
-
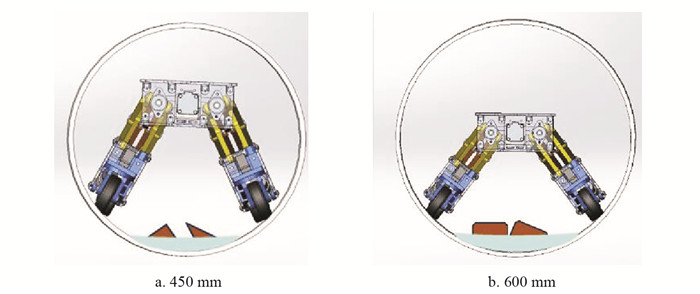
图 8 在450~612 mm管道内机器人行进示意
-
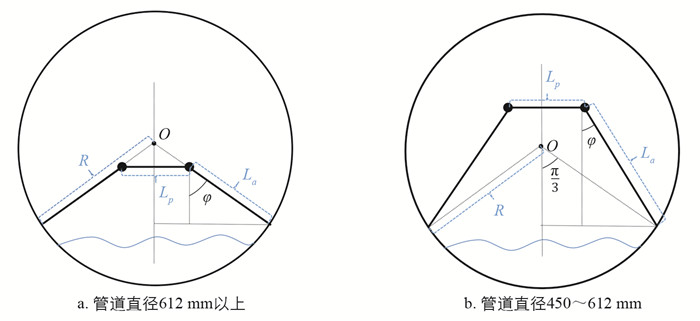
图 9 管道内机器人管径适应性分析
-
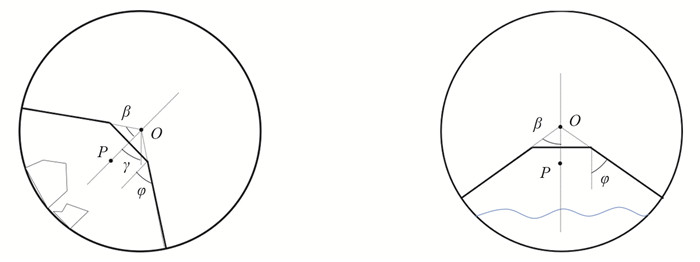
图 10 在直径612 mm以上的管道内机器人行驶位姿
-
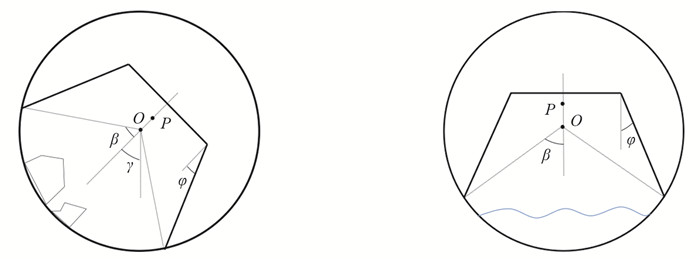
图 11 在450~612 mm管道内机器人行驶位姿
-
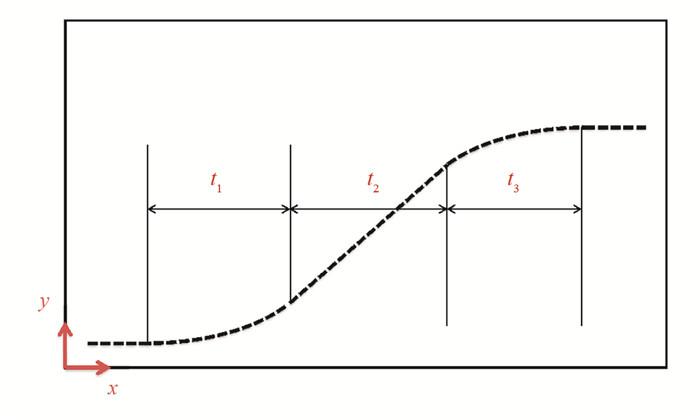
图 12 管道内表面展开平面和运动模块行进路线示意
-
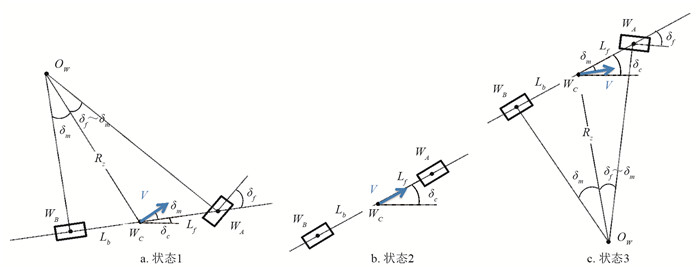
图 13 运动模块的几种运动状态分析
-
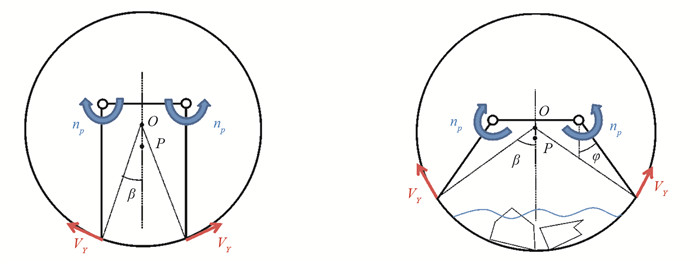
图 14 越障变换运动位姿
-
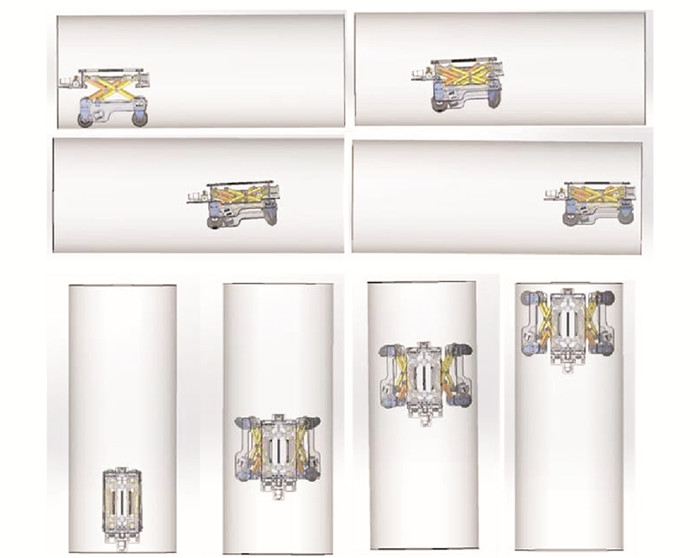
图 15 管道机器人越障变换示意
-
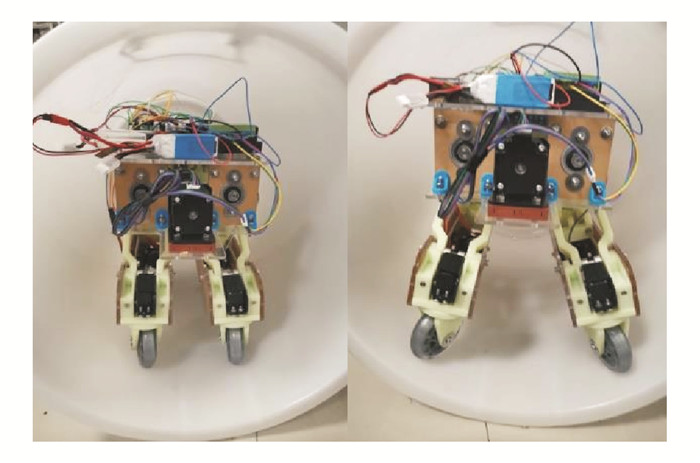
图 16 机器人样机500 mm 管道内越障变换位姿
-
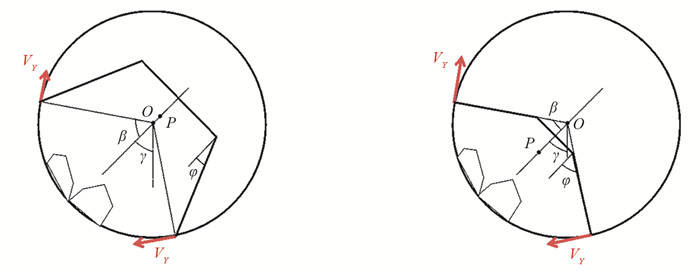
图 17 避障变换运动位姿
-
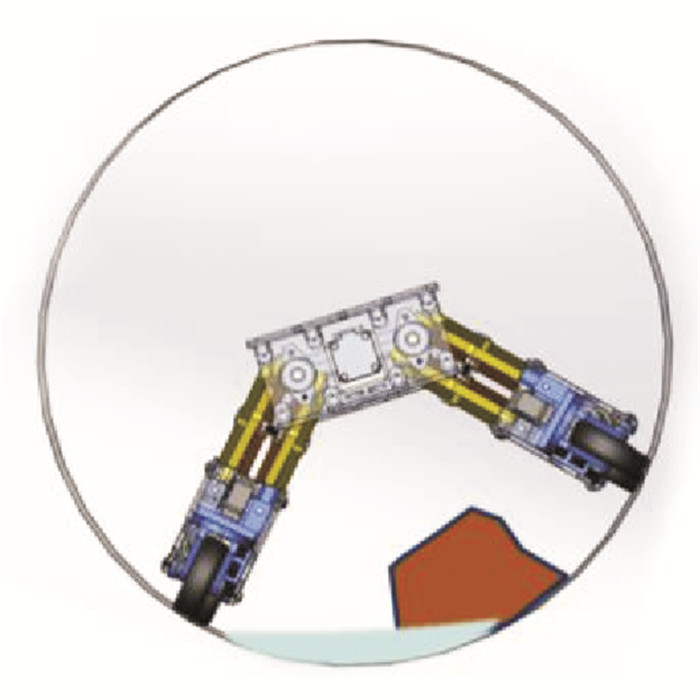
图 18 管道机器人避障运动示意
-
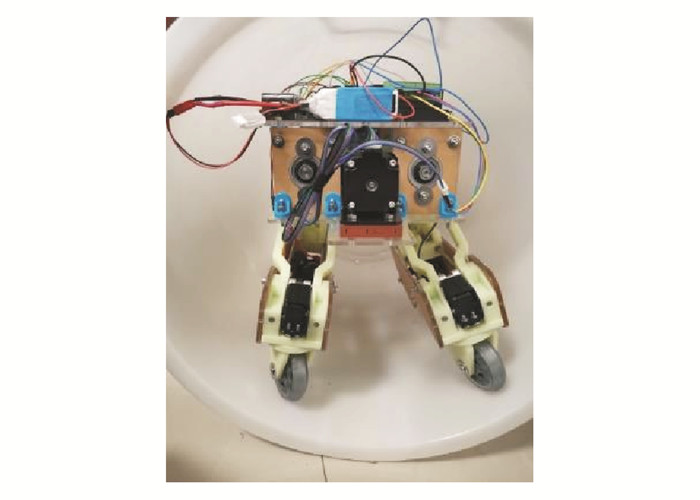
图 19 机器人样机500 mm管道内避障变换初始位姿
-
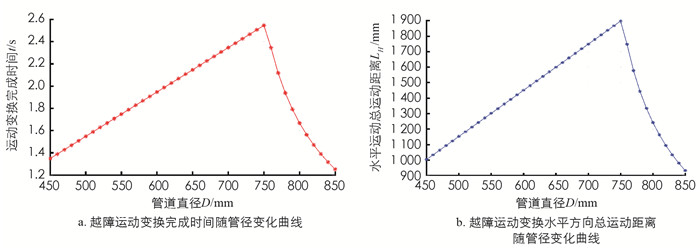
图 20 越障运动完成时间和水平方向总运动距离随管径变化曲线
-
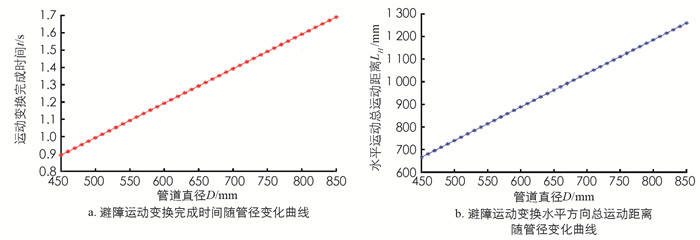
图 21 避障运动完成时间和水平方向总运动距离随管径变化曲线
-
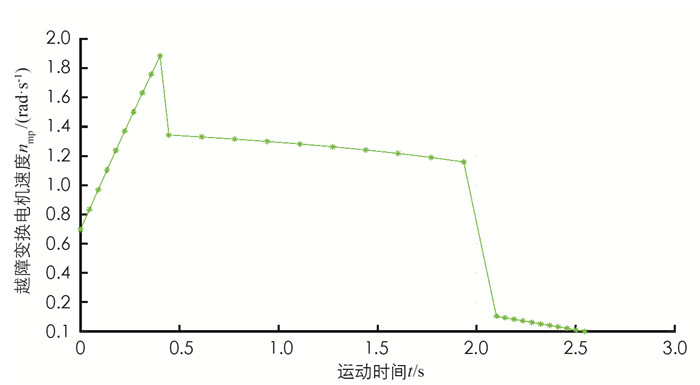
图 22 越障运动模块偏转电机转速随时间变化曲线
Figure
22 ,Table
2 个