-
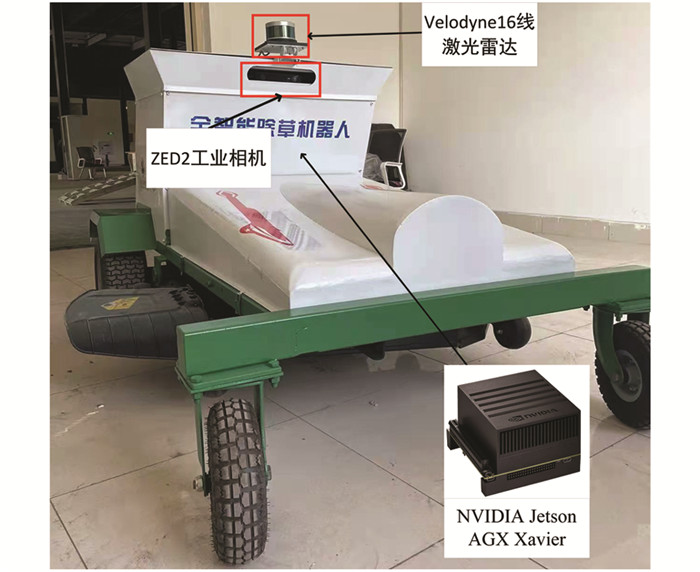
图 1 硬件系统框架
-
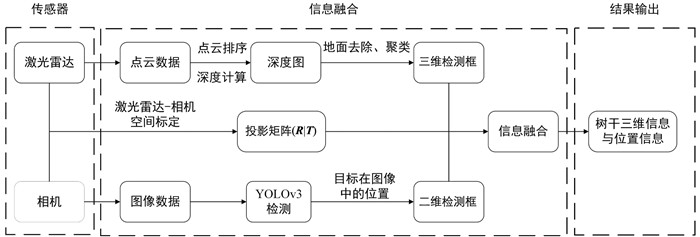
图 2 软件系统框架
-
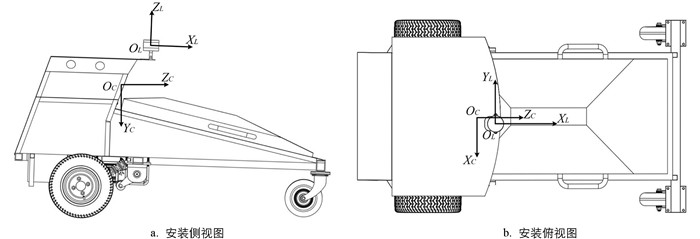
图 3 激光雷达与相机安装示意图
-
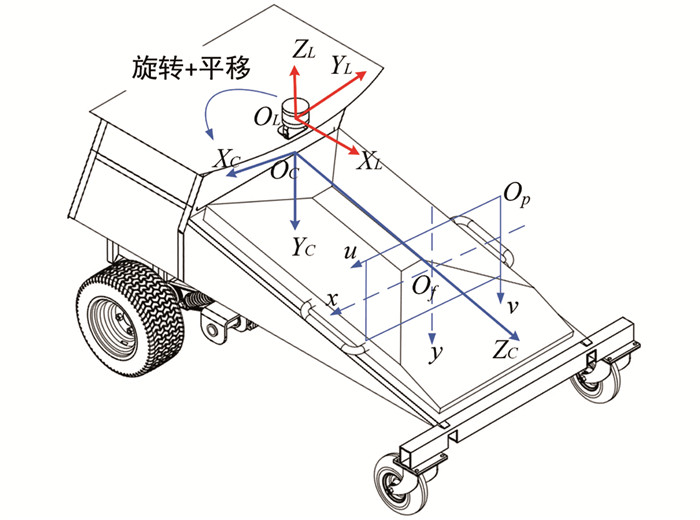
图 4 各传感器坐标系关系
-

图 5 激光雷达与相机标定结果
-

图 6 激光雷达点云聚类流程图
-
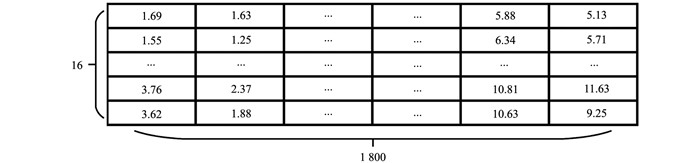
图 7 VLP-16激光雷达深度图示意图
-
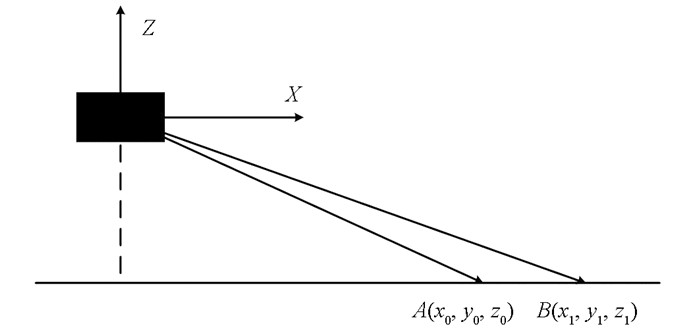
图 8 激光雷达相邻线束地面激光点
-
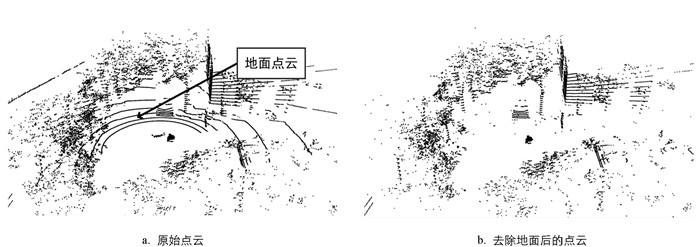
图 9 地面点云去除前后对比
-
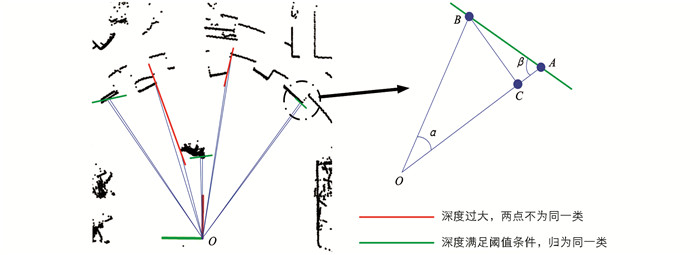
图 10 基于深度图的点云聚类
-
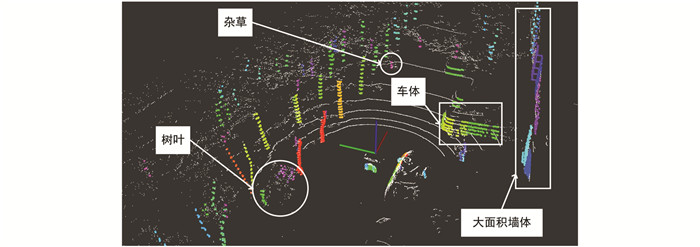
图 11 传统深度图点云聚类结果
-
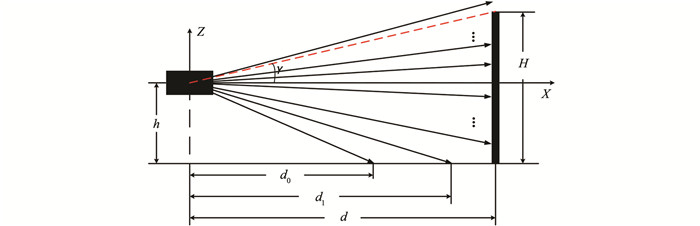
图 12 激光雷达线束分布
-
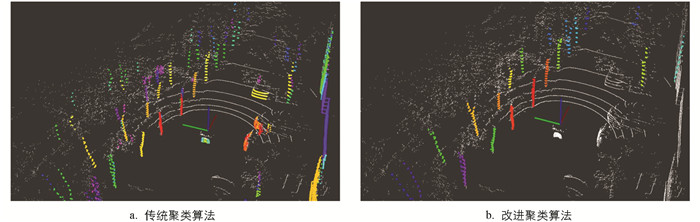
图 13 聚类算法改进前后对比
-
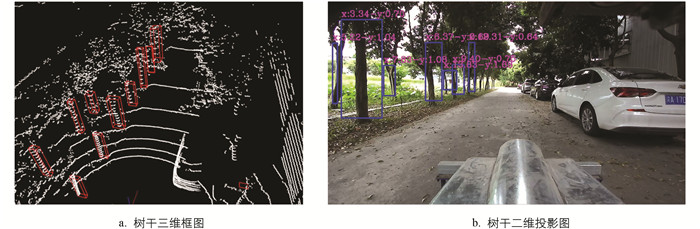
图 14 树干的三维框图与二维投影图
-
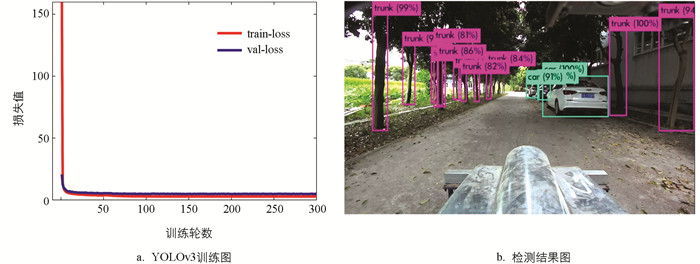
图 15 基于YOLOv3的树干检测
-
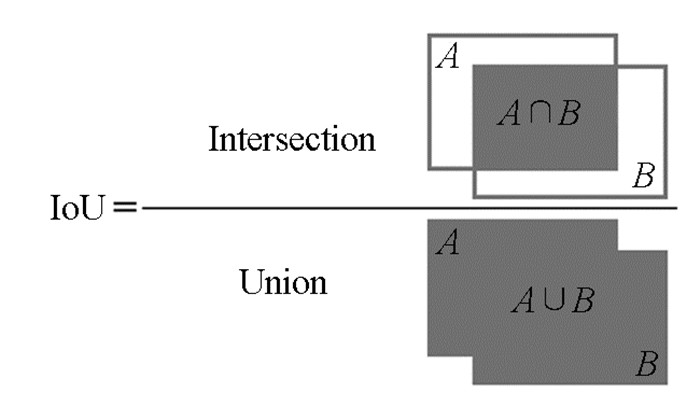
图 16 IoU计算图
-
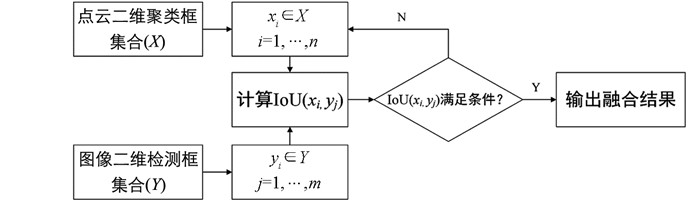
图 17 基于IoU的融合算法流程图
-
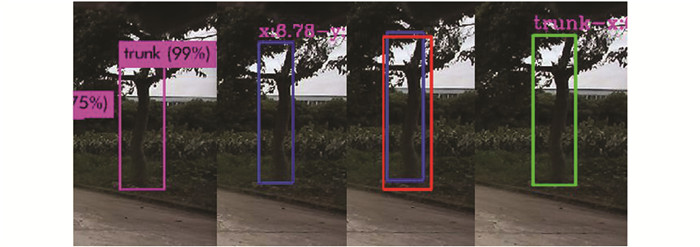
图 18 IoU融合图
-
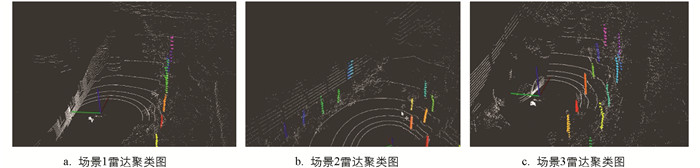
图 19 激光雷达聚类结果
-
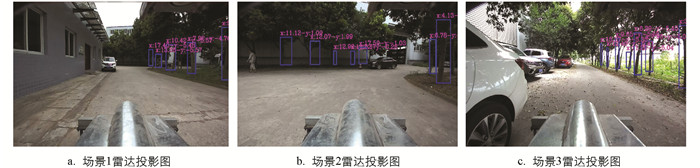
图 20 激光雷达投影结果
-
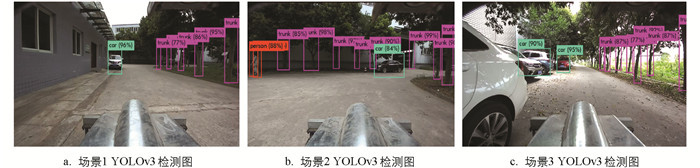
图 21 YOLOv3检测结果
-
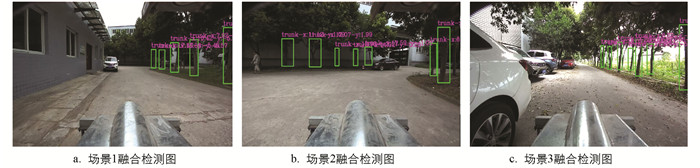
图 22 融合检测结果
Figure
22 ,Table
3 个