-

图 1 柑橘果园实景
-
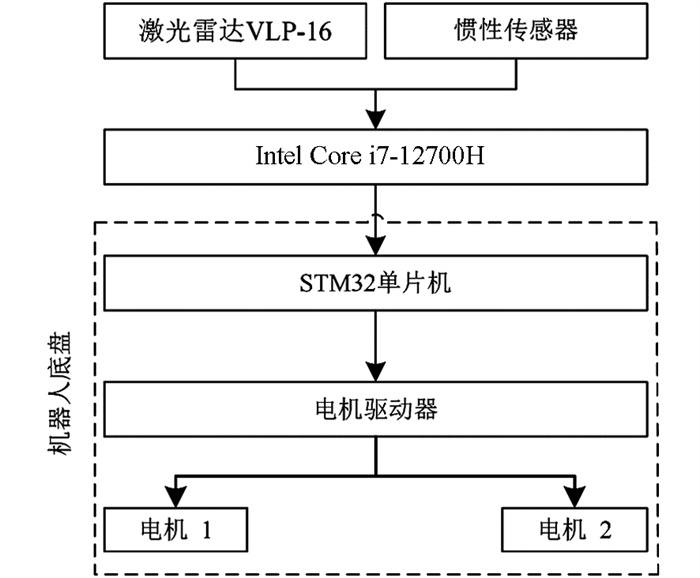
图 2 柑橘果园机器人组成
-

图 3 机器人工作流程
-
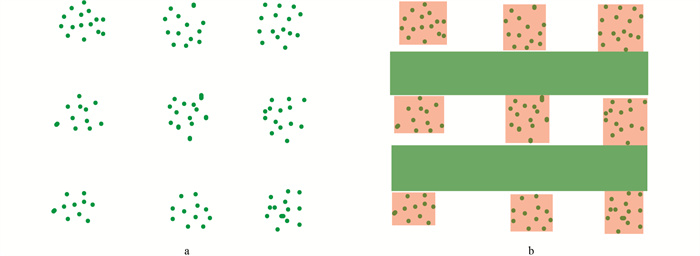
图 4 点云处理结果
-

图 5 轨迹优化方法对比
-
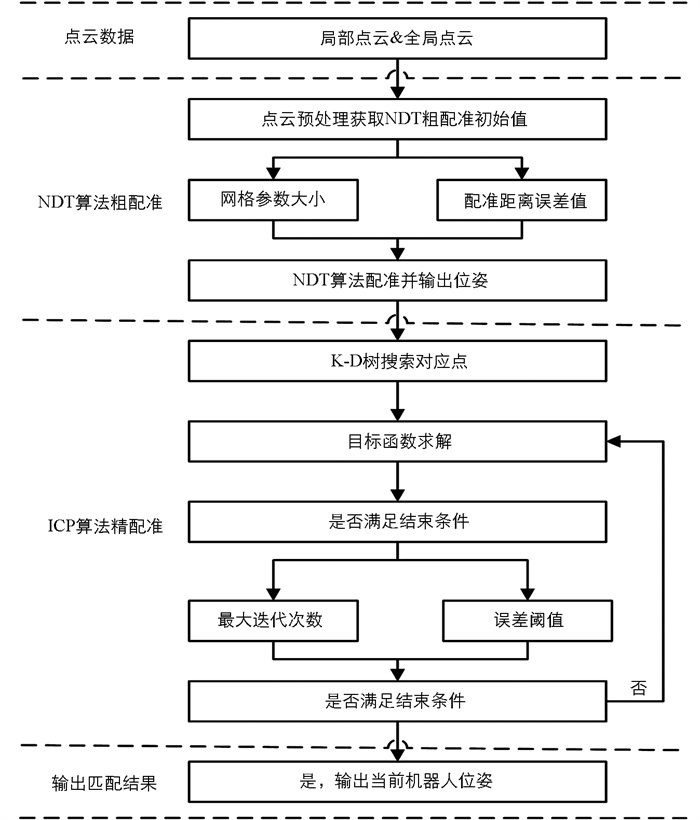
图 6 点云匹配流程
-
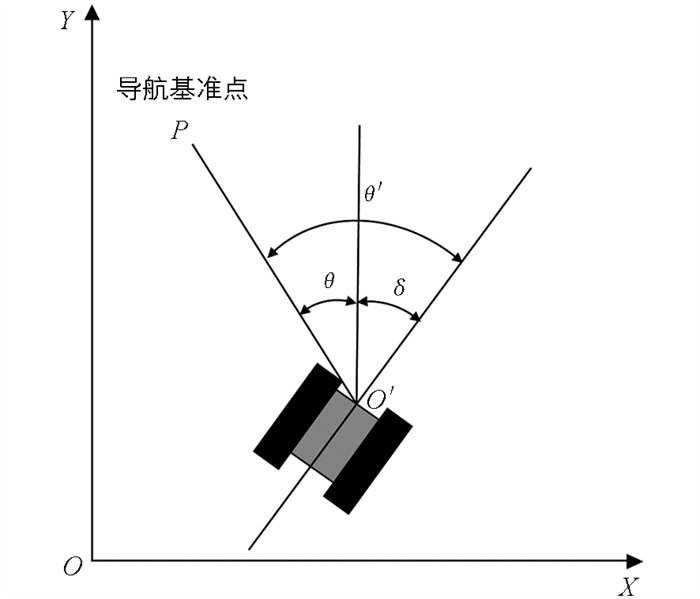
图 7 导航路径跟踪模型
-
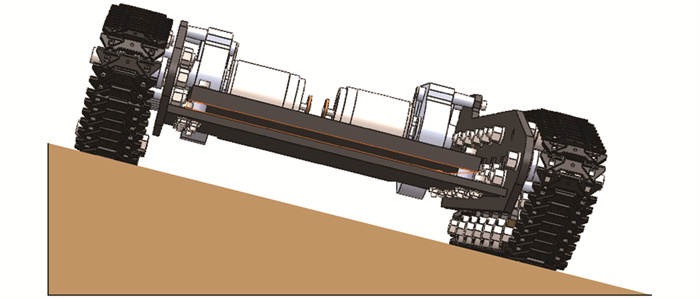
图 8 机器人斜坡运行示意图
-

图 9 自校正增量PID控制系统结构图
-

图 10 柑橘果园试验
-
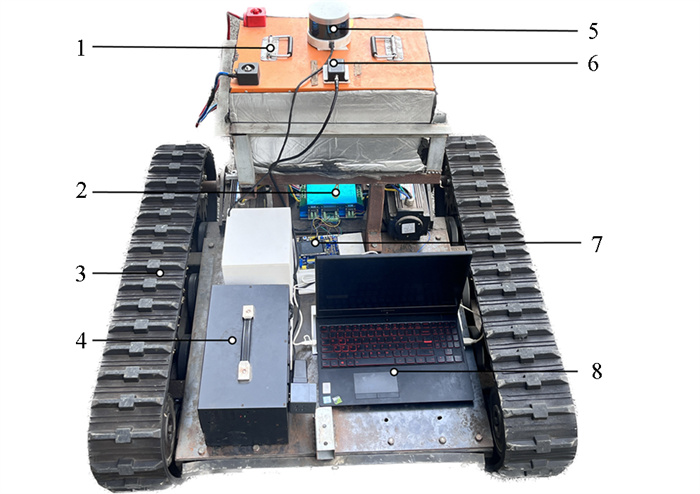
图 11 果园机器人
-
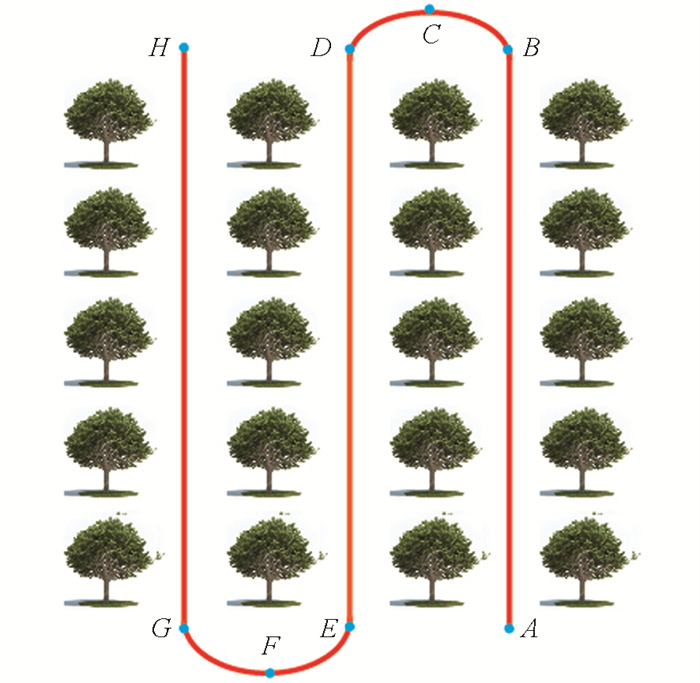
图 12 试验场景模拟图
-
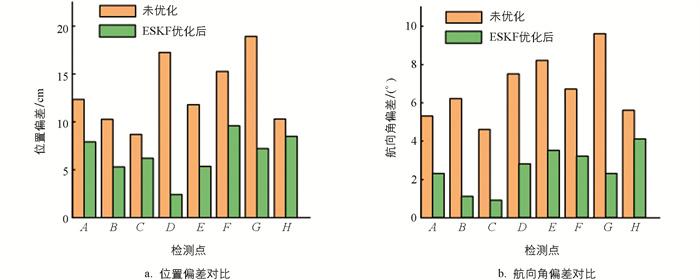
图 13 位置偏差和航向角偏差
-
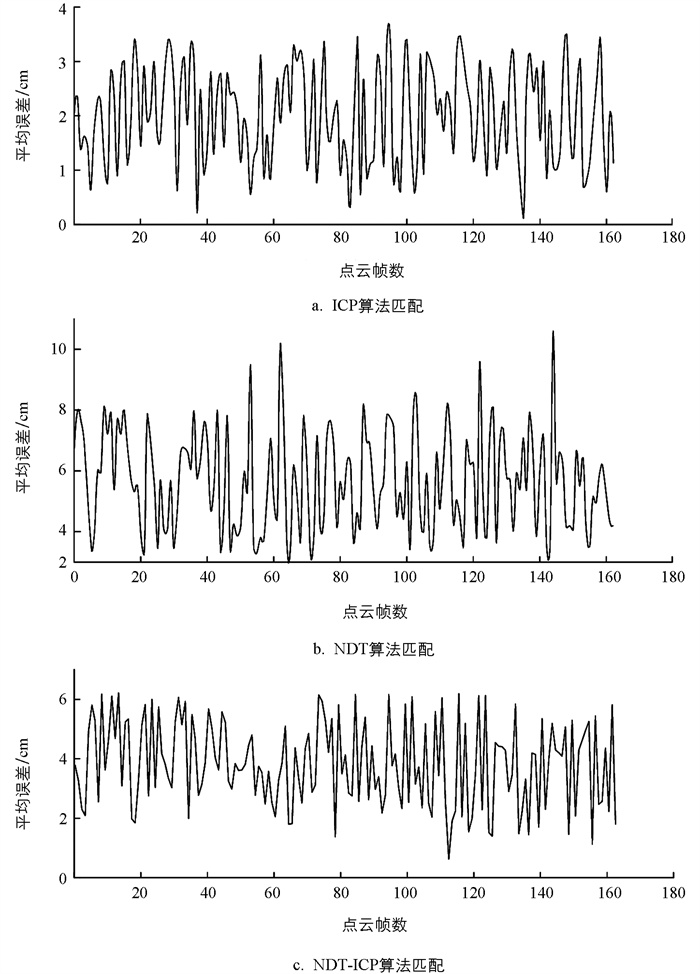
图 14 点云匹配定位精度对比
Figure
14 ,Table
3 个