-
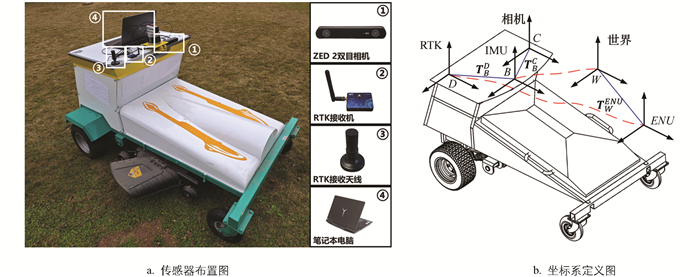
图 1 智能割草机实验平台
-
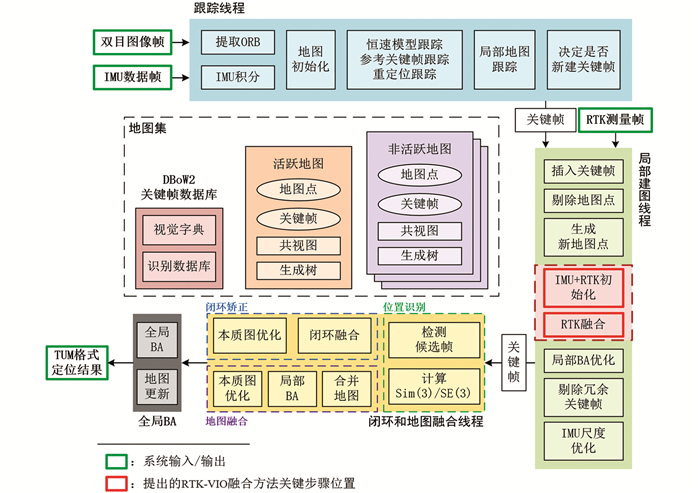
图 2 RTK-VIO融合定位算法系统架构
-
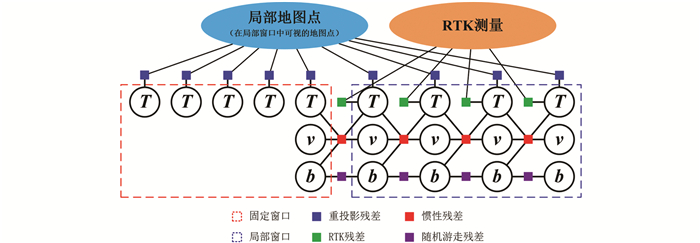
图 3 局部BA过程优化问题的因子图
-
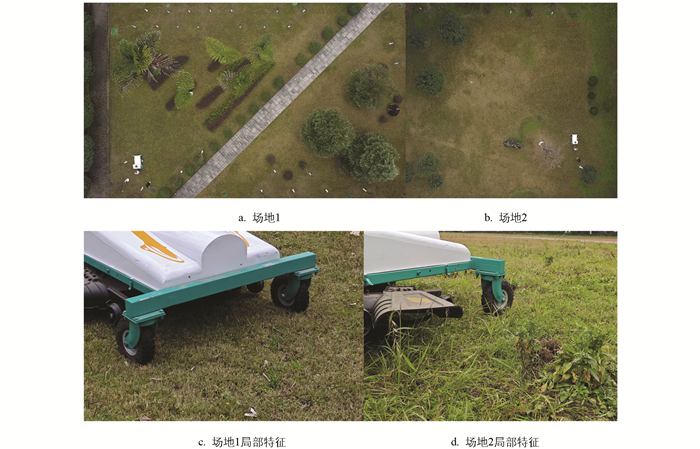
图 4 割草机实验场地
-
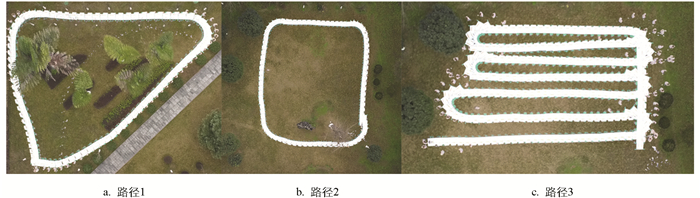
图 5 实验中智能割草机的作业路径
-

图 6 简单工况下的实验结果
-

图 7 一般工况下的实验结果
-

图 8 困难工况下的实验结果
-
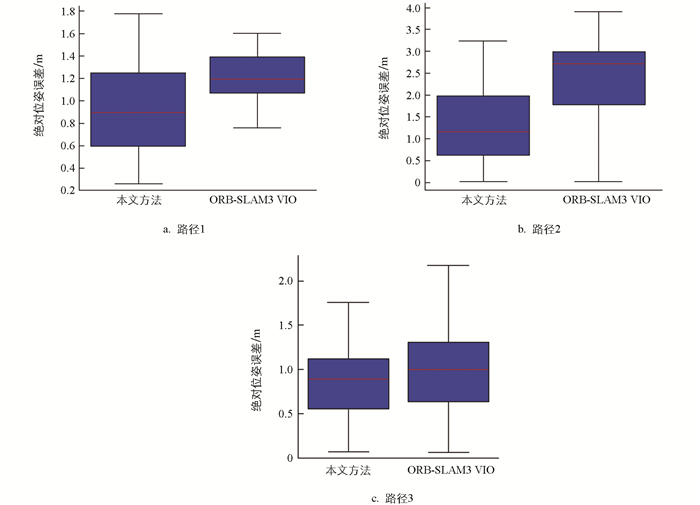
图 9 本文方法与对照方法的绝对位姿误差分布对比
Figure
9 ,Table
3 个