-
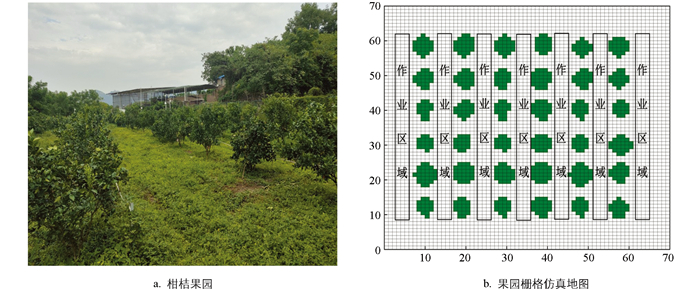
图 1 柑橘果园环境与模型建立
-
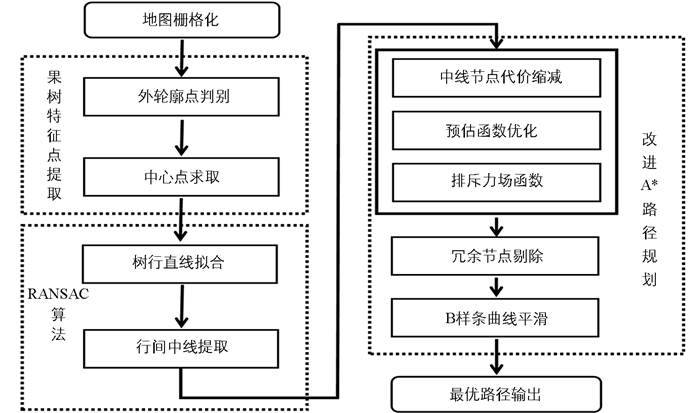
图 2 算法框架
-
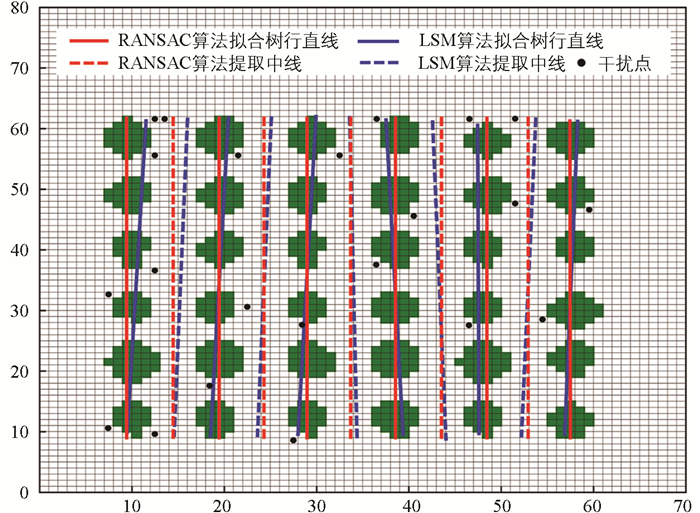
图 3 树行直线拟合及中线提取
-
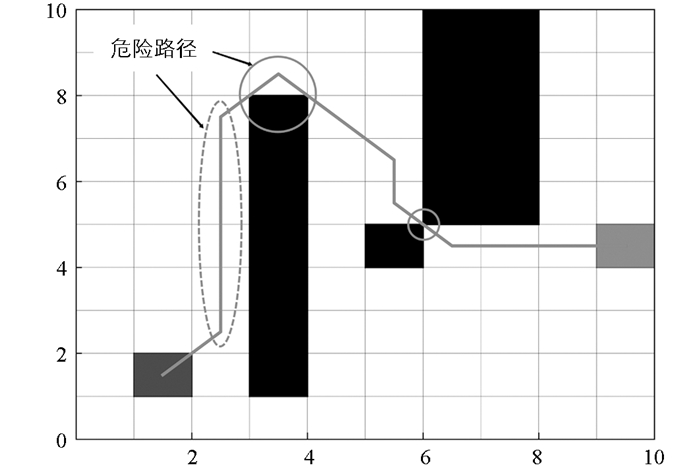
图 4 危险路径
-
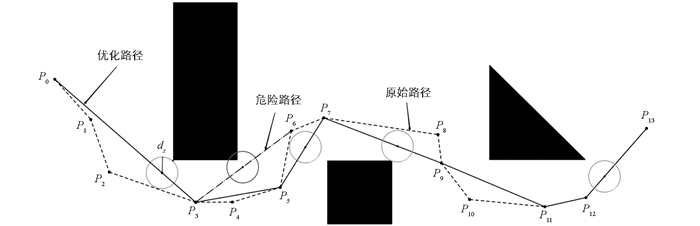
图 5 安全距离阈值冗余节点剔除过程
-
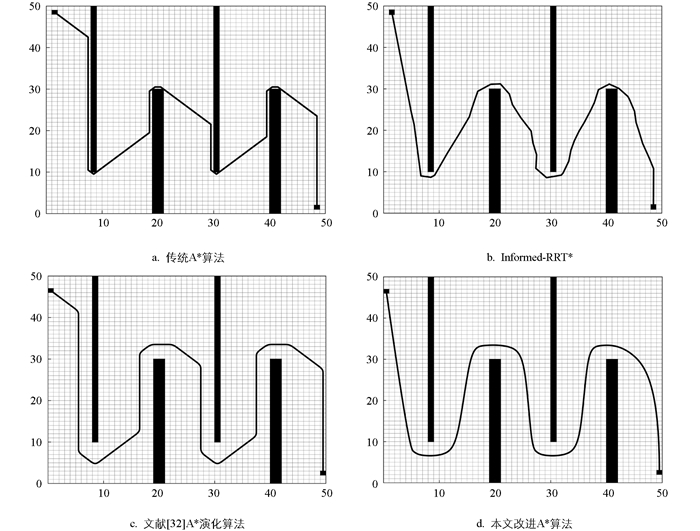
图 6 静态栅格地图不同路径规划算法效果对比
-
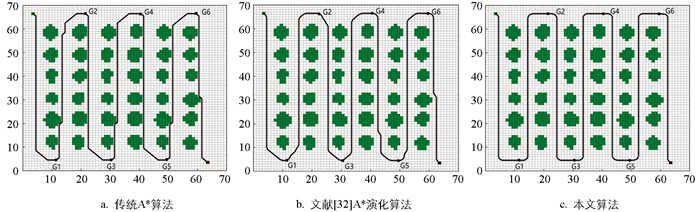
图 7 果园栅格仿真地图不同路径规划算法结果
-
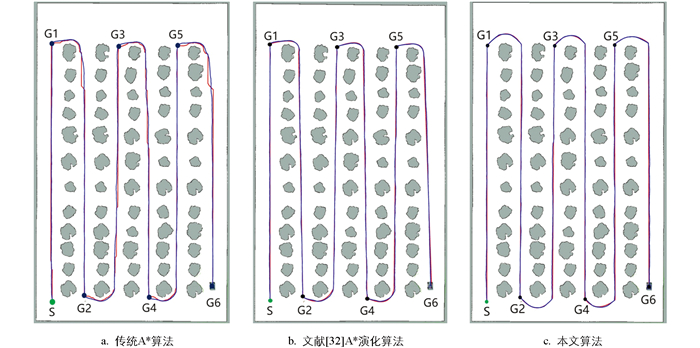
图 8 模拟果园路径跟踪试验结果
-
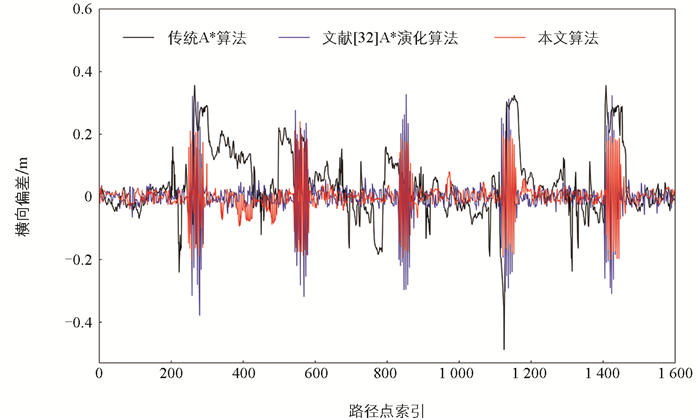
图 9 路径跟踪试验横向偏差对比图
Figure
9 ,Table
3 个