-
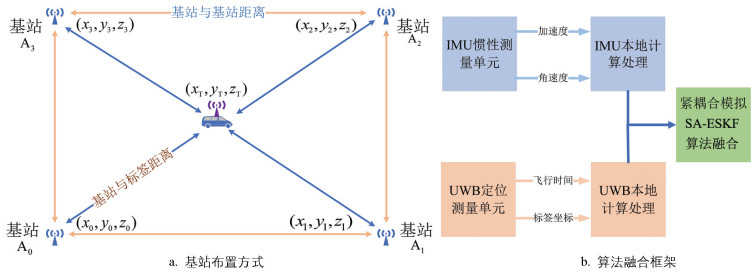
图 1 基站布置方式与算法融合框架
-
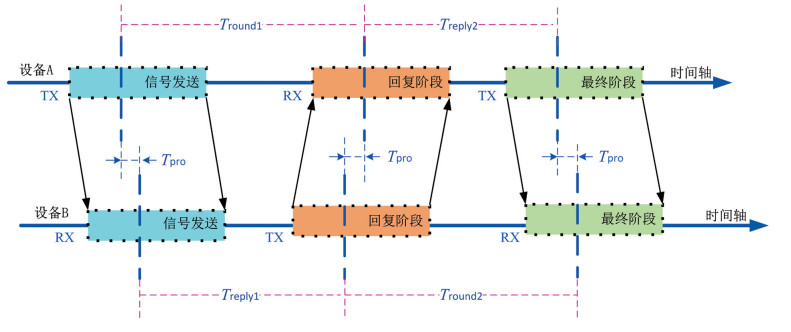
图 2 双边测距法原理
-
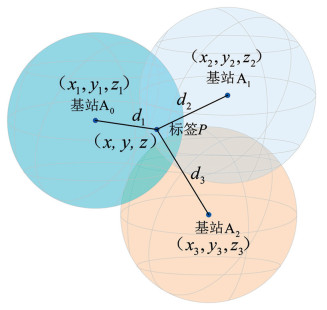
图 3 UWB三边定位原理
-
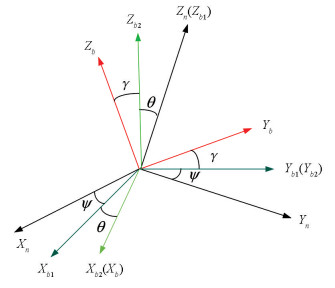
图 4 确定载体空间角
-
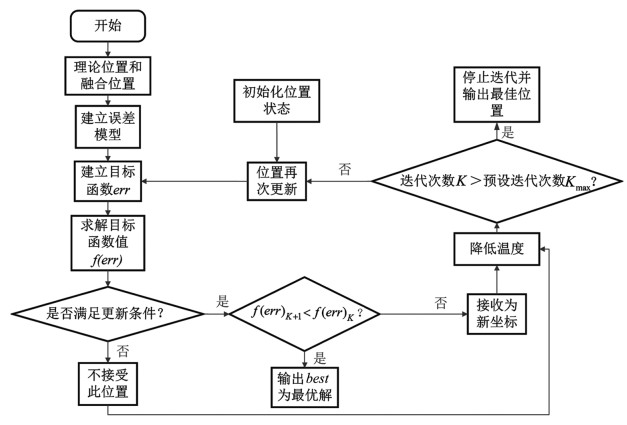
图 5 SA算法优化流程图
-
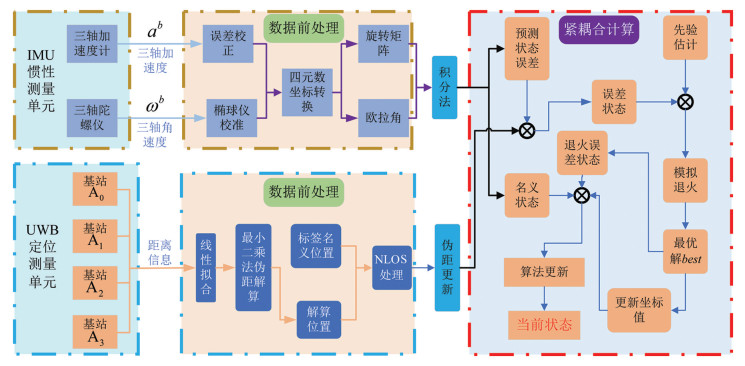
图 6 SA-ESKF算法流程图
-
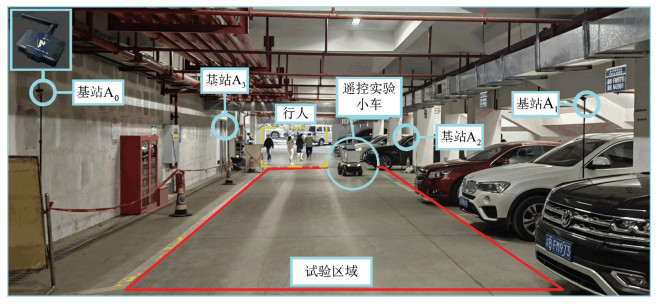
图 7 实验场地
-
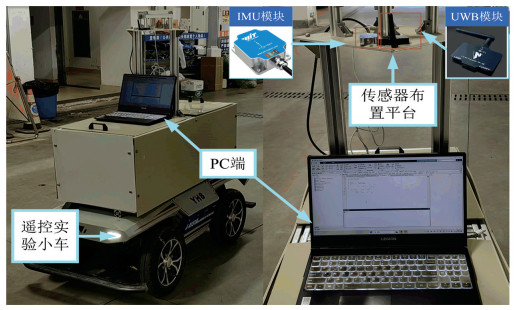
图 8 遥控实验小车与硬件布置
-
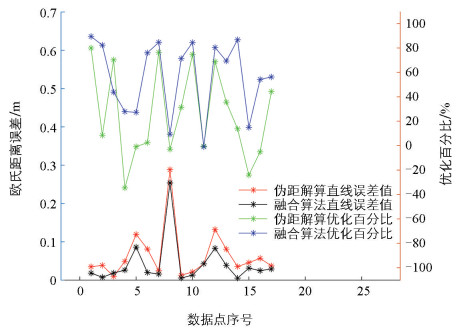
图 9 静态实验中欧氏距离误差与优化百分比
-
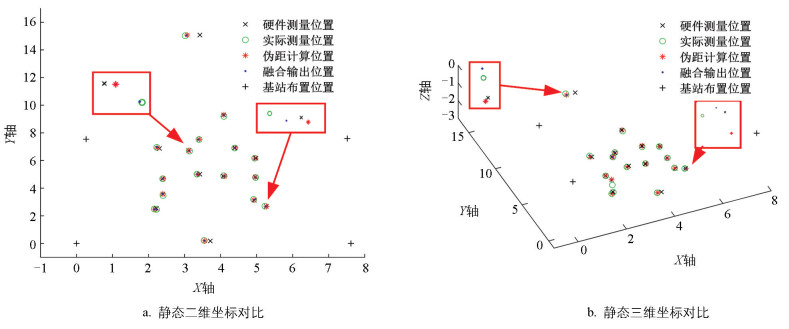
图 10 静态实验中各输出位置对比
-
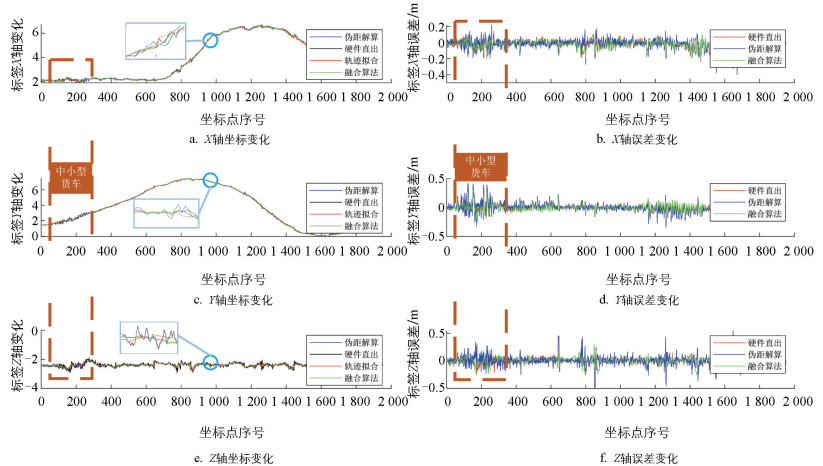
图 11 动态实验中三轴坐标与误差变化
-
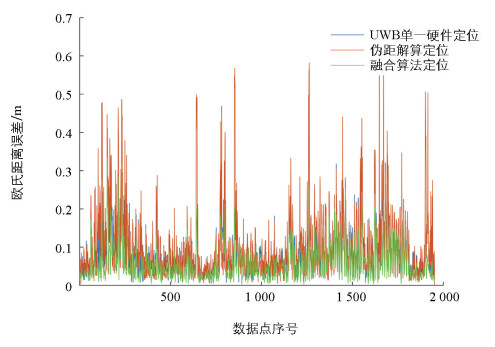
图 12 动态实验中3种定位方式欧氏距离误差对比
Figure
12 ,Table
3 个