-
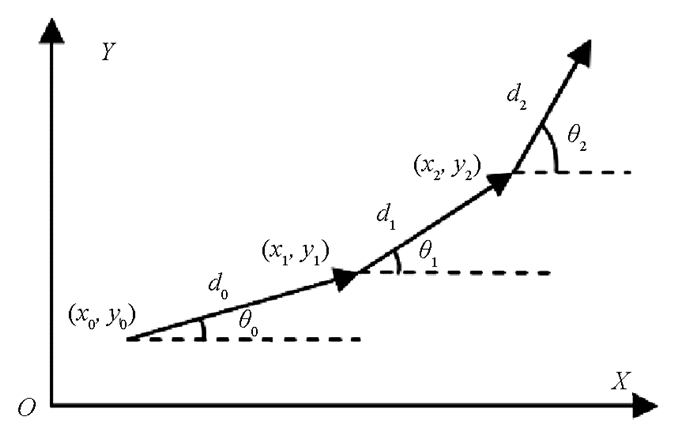
图 1 DR定位原理示意图
-
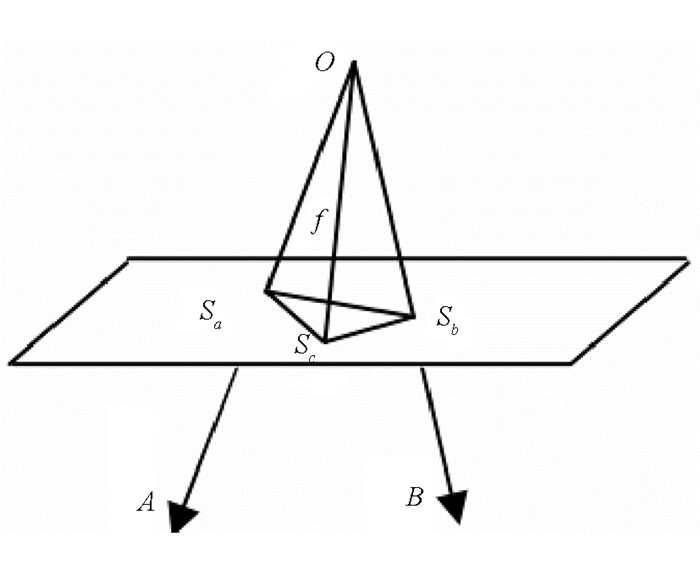
图 2 视觉测量原理图
-
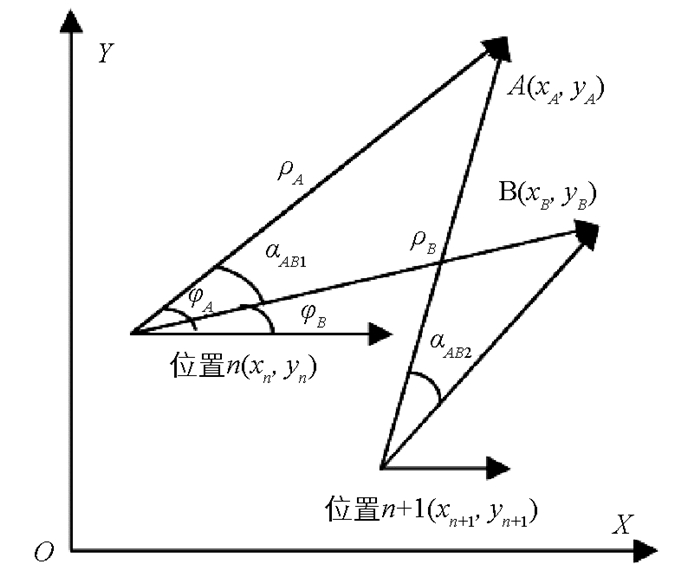
图 3 视觉与激光雷达的位置修正图
-
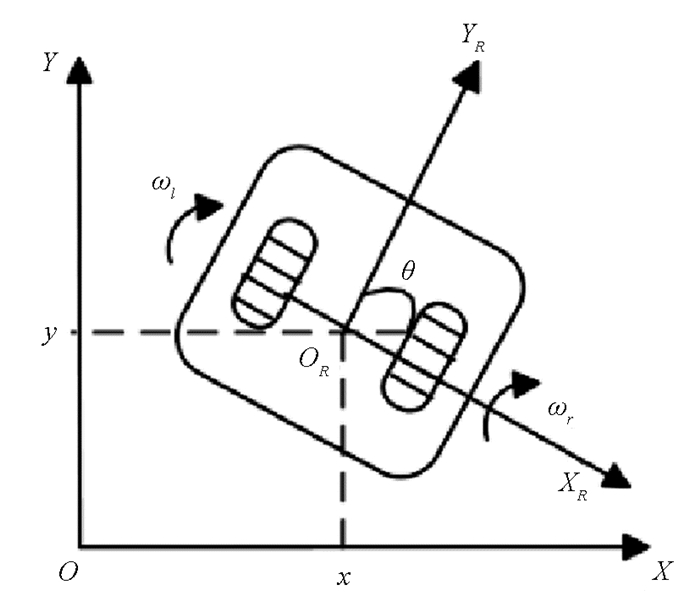
图 4 两轮驱动机器人运动学模型
-
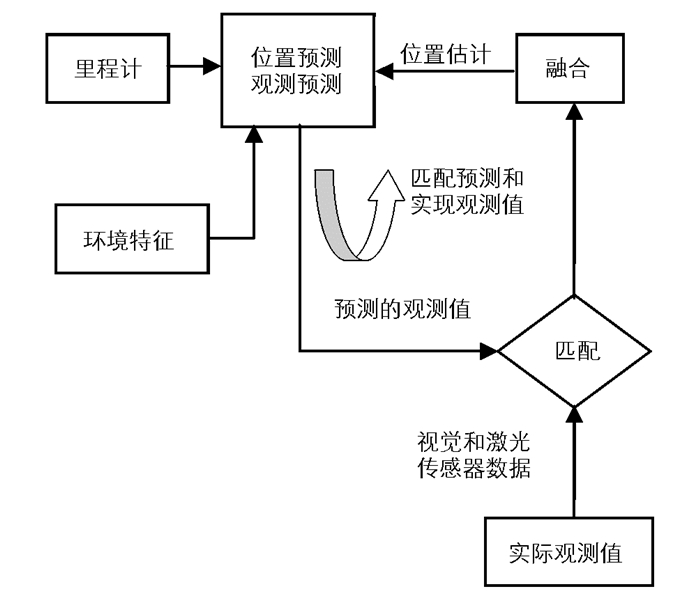
图 5 融合里程计、单目视觉与激光雷达信息的EKF定位算法框图
-
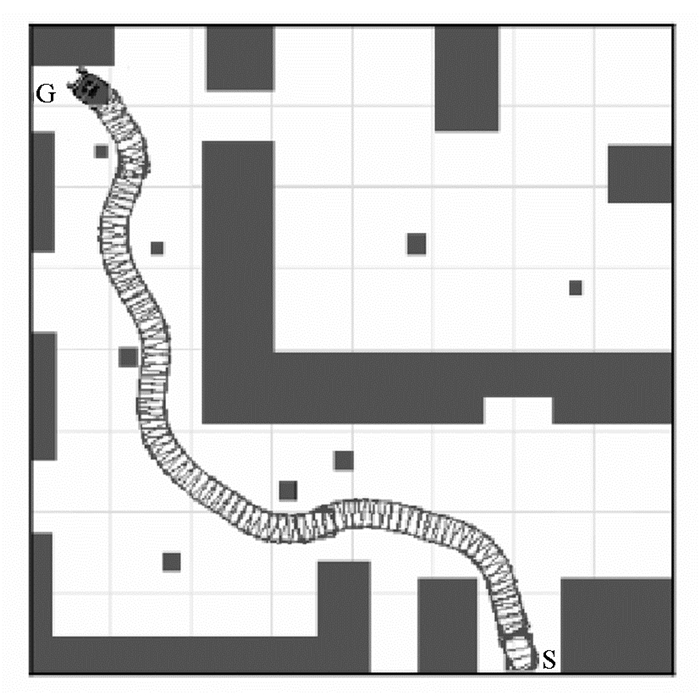
图 6 仅使用里程计的位置估计
-
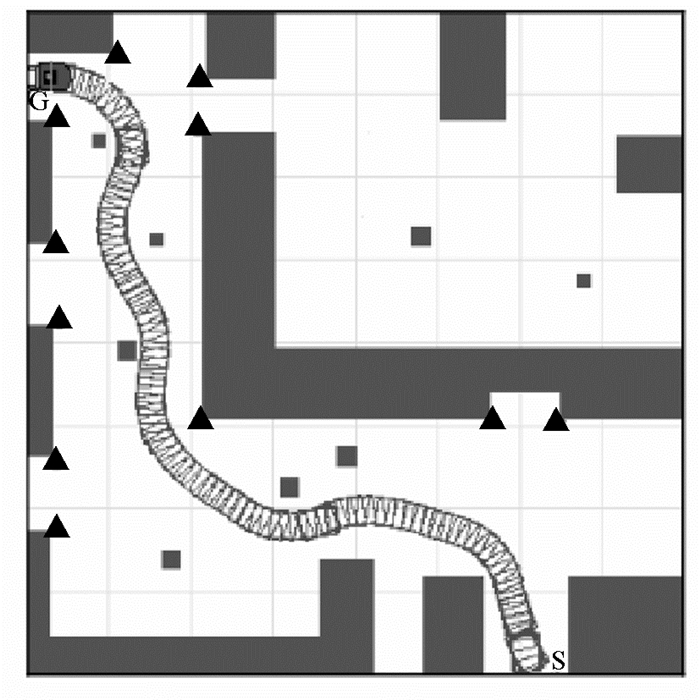
图 7 融合里程计、单目视觉和激光雷达信息的位置估计
Figure
7 ,Table
0 个