




-
我国甘蔗种植主要集中在南方,其中广西的种植面积占60%,广西属典型的喀斯特地貌,大部分甘蔗地处在沟坡山丘,地势起伏高低不平,甘蔗垄高变化大.而现有的甘蔗收割机无法根据蔗垄高度的变化自动调节刀盘高度,其主要原因是甘蔗掉落茎叶与杂草的存在,以及甘蔗倒伏等情况给甘蔗垄高实时检测带来困难,难以实现刀盘切割高度根据蔗垄高度变化自动调节控制,刀盘位置过高或过低都会影响种植户的经济效益.
目前针对甘蔗地垄高的研究主要有基于压力传感器[1-3]、超声波测距雷达[4]的蔗垄高度检测和基于图像识别的甘蔗—土壤分界面自动检测[5]等.基于压力传感器的蔗垄高度检测装置检测精度较高、稳定性较好,但受蔗地条件的土壤类型以及土壤含水率、甘蔗种植密度等影响较大,每次作业前都需要对蔗地土壤进行基准压力检测,过程复杂且耗时长;基于超声波测距雷达的甘蔗垄高检测装置原理简单、成本低、对恶劣天气适应性较好,但超声波传播速度慢、受蔗地复杂环境影响大、分辨率低方向性差,会造成较大的测距误差;基于图像识别的装置使用Visual C++把动态采集的图像进行去抖处理,识别甘蔗与土壤分界位置进行切割位置控制,但环境设置过于理想,甘蔗地实际收割环境复杂,常常伴有甘蔗掉落茎叶以及杂草的覆盖、甘蔗倒伏等情况,难以正确识别甘蔗土壤分界位置,造成测距误差.上述研究仍处试验研究阶段,还未形成完整可靠的仿形系统投入使用.
本文将微波频段的LFMCW雷达用于甘蔗垄高实时检测. LFMCW雷达系统结构简单、体积小、成本低,广泛应用于民用与军事领域,市场上大多数的汽车雷达正是采用三角波调制的LFMCW雷达.微波频段的LFMCW雷达不仅具有较强的穿透能力,且传播速度快、测距时间短、响应时间间隔小、能实现实时检测.微波频段的LFMCW雷达还可以穿透植被等覆盖物的遮挡到达土壤表面,并且拥有较大的带宽,能够获得更高的测距精度[6].
HTML
-
LFMCW雷达通过发射调制频率连续波获取回波信号进而得到目标信息.常用的LFMCW雷达的发射波调制方式有两种:锯齿波、三角波,三角波可同时用于测距与测速,锯齿波只能用于测距.考虑到甘蔗收割机自身的移动,研究采用三角波调制方式. LFMCW雷达将发射信号与回波信号混频得到差拍信号,差拍信号经过信号处理获得差拍频率,差拍频率由传播延迟和多普勒频率组成,可从差拍频率得到雷达探测目标的距离和速度信息,三角波调制的LFMCW雷达测距原理如图 1所示.
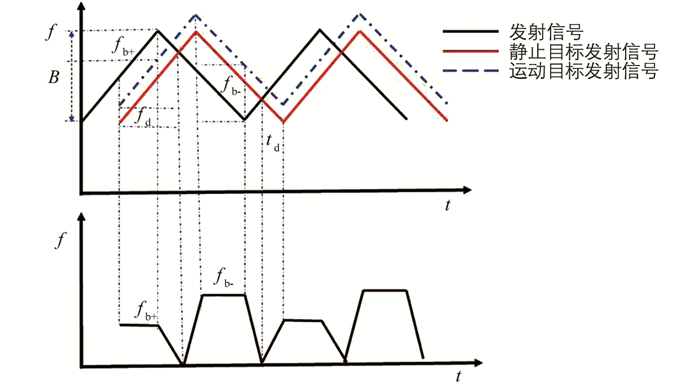
图 1中,B表示调频带宽,fb+表示上差拍信号频率,fb-表示下差拍信号频率,fd表示多普勒频移,与目标的移动速度v有关,其值为:
${f_d} = 2\frac{{{f_c} \times v}}{c}$ ,td表示回波信号的时间延迟,其值为${t_d} = 2 * \frac{{{R_0} + vt}}{c}$ ,fc表示发射机工作频率,c表示电磁波的传播速度,R0表示雷达天线到目标的距离.对称三角LFMCW雷达的发射信号为[7]
其中AT为信号包络,fT(τ)是发射频率的时间线性函数,T为周期.
移动速度为v,距离雷达R0的目标回波信号可以表示为
其中AR为接收信号的幅度,其大小取决于天线增益、雷达发射功率、目标的距离与目标的雷达散射截面积(RCS).将发射信号与回波信号在时域相乘进行混合,传递到低通滤波器,低通滤波器输出差拍信号,对差拍信号进行傅里叶变换与恒虚警处理(CFAR),可求得上差拍信号频率fb+与下差拍频率fb-,进而可求得目标的距离与速度,如公式(3)、(4)所示.
利用公式(3)可得雷达发射天线到目标物的距离R0.
-
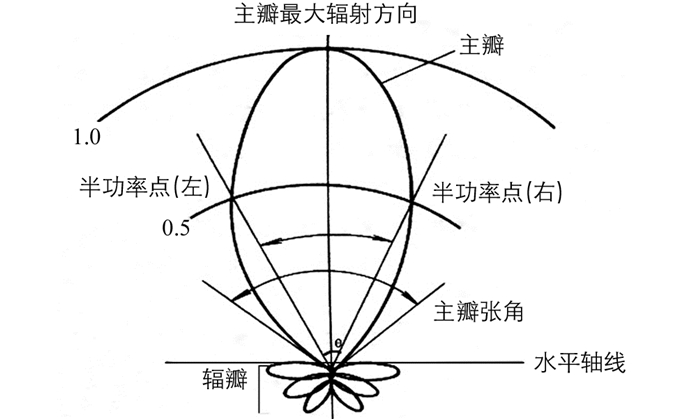
雷达天线将电磁能量集中在一个很窄的方向上形成波束发射出去,遇到波束内的目标后,电磁能量朝着各个方向反射,其回波被天线接收. LFMCW雷达天线发射波束的覆盖范围过宽会导致甘蔗垄沟也在波束覆盖范围内,造成误检.天线发射电磁波如图 2所示,天线分为主瓣与副瓣两个部分,主瓣的辐射最强,波束与轴线垂直的方向是主瓣最大辐射方向.主瓣的宽度也称半功率波瓣宽度,代表主瓣的能流密度不低于最大值一半的区域.为了满足甘蔗根系的营养需求,农场种植的甘蔗垄宽一般为1.85 m,沟宽20~25 cm,成熟的甘蔗植株高度3~6 m,直径2~5 cm.考虑到甘蔗株高,仿真中取天线到蔗垄土表的距离R0=8 m,若想覆盖范围不超过蔗垄的宽度,经计算只需在选择天线时天线主波瓣角θ≤13°[8].
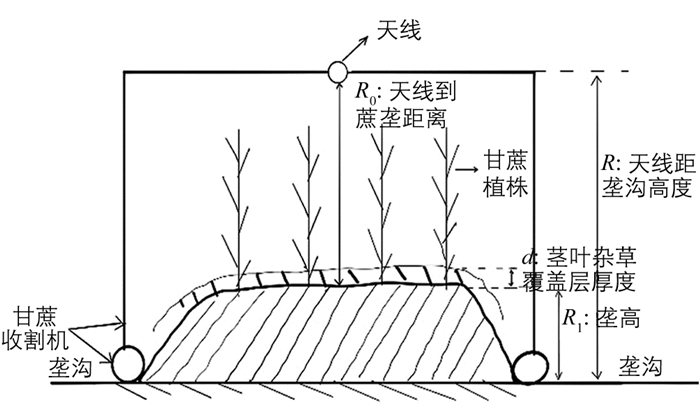
雷达波穿过甘蔗植株与茎叶覆盖层时甘蔗植株之间存在相互散射,会造成测距误差,该问题将在下一节仔细阐述.甘蔗垄高的检测装置原理如图 3所示,蔗垄是小起伏的粗糙地面,雷达接收天线到垄沟表面的距离R是固定值,雷达天线发射电磁波穿透甘蔗植株与掉落茎叶的遮挡到达蔗垄的土壤表面,反射电磁波信号再次穿透覆盖物被雷达天线接收,经信号处理可得到天线与蔗垄表面的距离R0,蔗垄高度R1可由R1=R-R0得到,依据实时测定的垄高值,按照控制规则进而实现刀盘高度的自动调节.
1.1. LFMCW雷达测距原理
1.2. 蔗地垄高检测原理
-
雷达的系统参数、土壤表面参数以及植被参数都会影响雷达的后向散射结果.地表有植被覆盖时,接收天线收到的信号包括目标信号、杂波信号以及噪声.目标信号为经过植被层双层衰减的地表直接后向散射;杂波信号为植被层的直接后向散射、植被层—地表—地表—植被层相互耦合作用的后向散射、地表下层—植被—地表下层相互耦合作用的后向散射[6];噪声一般来自器械内部,用高斯白噪声表示.
-
LFMCW雷达工作频率的选择主要考虑电磁波的穿透深度与距离分辨率两个方面,雷达的工作频率又称为中心频率,是雷达起始频率与截止频率的中值,雷达波长会影响电磁波的穿透深度,调频带宽会影响雷达的距离分辨率.
由于介质的吸收和散射,雷达波信号在传播时会逐渐减弱直至消失,导致其无法穿透植被到达土壤,最终影响测距.由电磁场理论可知,当雷达发射功率P(x)在介质中衰减到
$\frac{1}{e}$ 时,其穿透的距离Lp称作穿透深度. Lp取决于电磁波波长λ和介质的复介电常数ε,在复介电常数一定时,波长越长,Lp越大.复介电常数由实部和虚部组成,ε′表示其实部,与介质的介电特性有关,ε″表示其虚部,与入射波在介质中的吸收和转化有关,当ε″/ε′<0.1,穿透深度可以用公式(5)表示,式中λ为电磁波的波长[9].雷达的距离分辨率与调频带宽的关系如公式(6)所示:式中,ΔR表示雷达的距离分辨率,c表示电磁波的传播速度,B表示雷达的调频带宽,调频带宽B的值等于LFMCW雷达工作的起始频率与截止频率的差值,带宽越大,距离分辨率越高,但由于成本及工艺技术的限制,带宽不能无限增大.在微波频段,2.4 GHz是常用的WIFI频率,临近该频率的电磁波容易被干扰,因此考虑到距离分辨率与工作频率的稳定性,选用的工作频率应在L波段(1~2 GHz).甘蔗一般种植于疏松肥沃的沙壤土,种植密度每平米6~8株,成熟蔗杆直径2~5 cm,栽种土壤含水率不超过40%,10%~30%最为常见[6],对应介电常数实部通常在4~14之间,虚部通常在-2.5~-0.2之间.蔗杆的含水率较高,一般为75%,甘蔗种植容积率为0.19%~1.6%,计算甘蔗植被整体的介电常数时,可将其看作是由植株与植株间的空气组成,而蔗叶长达1 m,宽4~6 cm,因此甘蔗茎叶在介电常数中占主导地位[10].收割季节甘蔗茎叶含水率低而呈枯黄色,在0~20 GHz的雷达频率下,对应的甘蔗茎叶介电常数实部约为2,虚部<0.001[11].当工作频率为1.5 GHz时,雷达波长λ=0.2 m,由公式(5)可知,穿透深度可达45 m.因此,文章选用1.5 GHz的雷达波不仅抗干扰能力强、成本相对较低,而且拥有较大的带宽与波长,能够得到更高的检测精度与穿透深度.
-
地表参数主要与地表粗糙度与土壤含水量有关,与植被参数与植被散射体的几何尺寸、含水量、空间位置分布、密度等有关.含水量主要影响物体的复介电常数,复介电常数与其他参数共同影响物体的雷达散射截面积(RCS).土壤目标信号与覆盖物杂波的信噪比可用公式(7)表示,δs0,δv0分别表示土壤与覆盖物的平均雷达散射截面积(NRCS).除了在植被覆盖物生长旺盛期间,叶子鲜绿、含水率高且土壤干燥贫瘠的情况外,大多数情况下,δv0≪δs0,因此在信号处理时,雷达到土壤表面的测距是与土壤表面返回波的较高峰值有关[12].
物体的NRCS是衡量其反射电磁波能力的标准,与物体的自身特性有关,也与电磁波的入射频率、极化方式、入射角等有关,难以定量表述,实验中土壤与植被的NRCS根据已有文献的数据资料取值.植被茎叶的介电模型由非分散残余部分、自由水部分、束缚水部分组成,其复介电常数如公式(8)所示,值的大小主要与含水率Mg有关.公式(8)中,εv表示植被茎叶的复介电常数;εr表示非分散残余部分,其表达式为:εr=1.7-0.74Mg+6.16Mg2;vfw表示自由水的容积率,其表达式为:vfw=Mg(0.55Mg-0.007 6);fc是电磁波频率,ϑ是纯水中的电导率;vb表示植被束缚水的体积百分比,其表达式为:vb=4.64
$\frac{{{M_g}^2}}{{1 + 7.36{M_g}^2}}$ .植被杆茎的介电模型与茎叶类似,Mv表示体积含水量,其值为:Mv=Mgρ/[1-Mg(1-ρ)],ρ表示容积率[10].杂波幅度的概率密度函数(PDF)可以用来描述杂波复散射截面积x的随机起伏性.杂波的幅度分布模型包括:瑞利分布、对数正态分布、韦布尔分布和K分布.韦布尔分布适用于近距离即严重杂波的情况,能够较好拟合植被杂波的幅度分布,其概率密度函数为[13]
q为尺度参数,代表分布的中位数;p为形状参数,代表分布的倾斜度,p主要与地形有关,其值一般为0.5~2.尺度参数q与形状参数和杂波的NRCS有关,NRCS用σc表示,其关系式为
NRCS与介电常数将植被的干扰与Weibull杂波的分布建立了联系.
2.1. 雷达系统参数
2.2. 环境参数
-
仿真界面是基于MATLAB 2018a版本的图形用户交互界面(GUI)进行填充,用MATLAB语言编写程序,服务器配置为Inter(R)Xeon(R)Gold 6148 CPU @2.40 GHz处理器,64GB内存,WINDOWS 10专业版,64位操作系统,NVIDIA GeForce RTX2080显卡. GUI便捷、准确、实用性强,非专业人员也能快速理解并操作.如图 4所示,本文设计的GUI能够快捷地更改测试参数,直观地显示出不同参数对测距的影响.
-
Weibull模型能够更好地模拟真实环境下植被的杂波分布,针对Weibull杂波的原理框图如图 5所示.
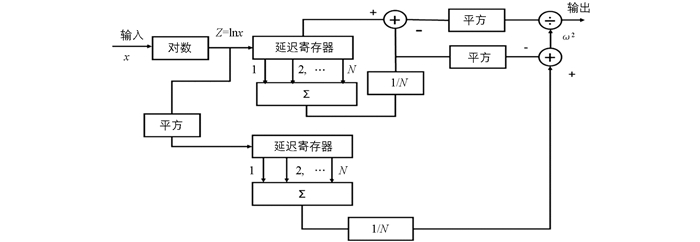
令z=lnx,则公式(9)可变成[13]:
其均值和方差分别为
公式(11)中γ为欧拉常数,约为0.577 2.对z进行归一化处理,可得:
其概率密度函数可写为
把w加到门限为ω0的检测器上,可得其虚警概率:
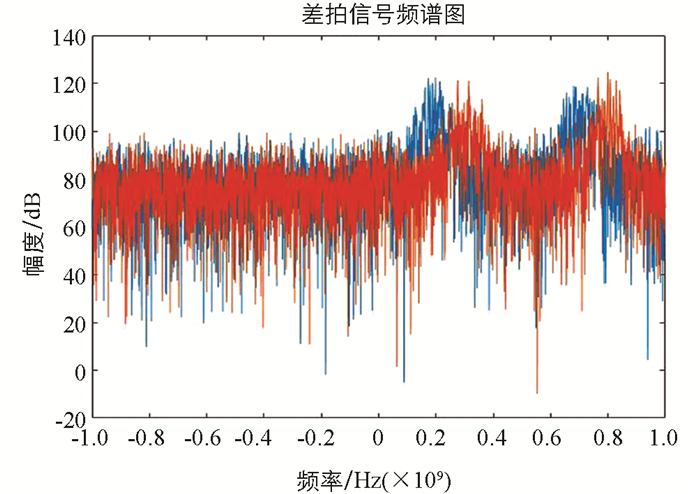
信号处理的主要目的是获得正确的差拍频率并通过差拍频率获得目标的真实距离和速度信息.将接收天线收到的回波信号与发射信号混频并滤去高频分量,得到差拍信号.当没有杂波干扰时,差拍信号、CFAR处理后的信号分别如图 6、图 7所示,可以直接得到差拍频率,获得目标信息.当目标回波信号被杂波和噪声干扰时,要精确地对目标进行距离测量,就需要能够抑制强杂波的影响.
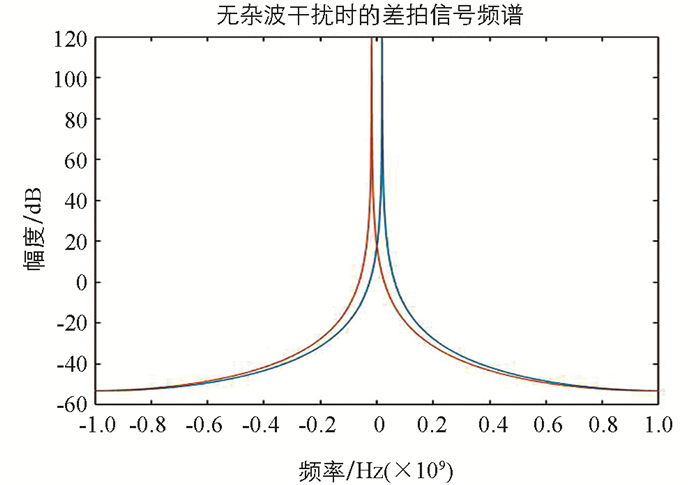
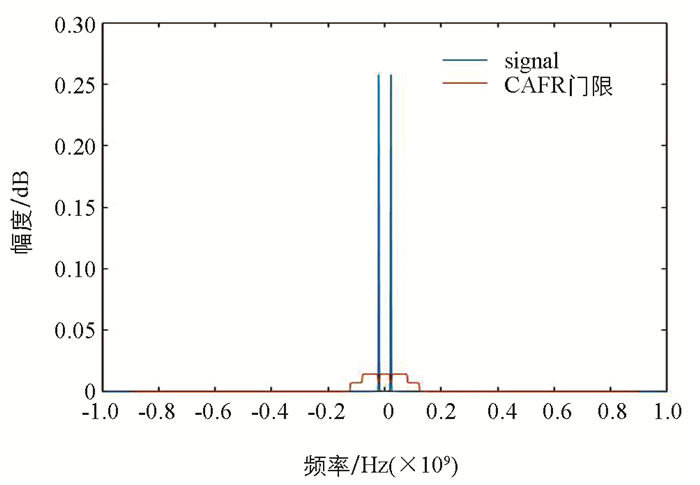
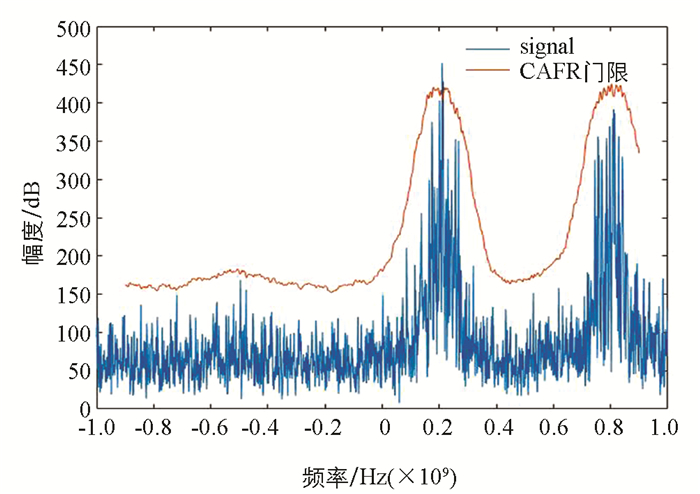
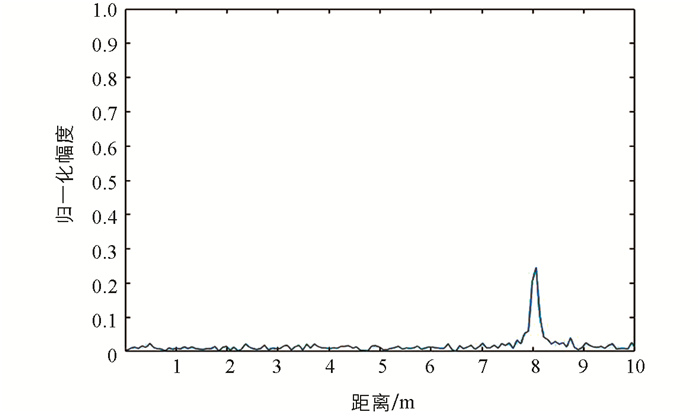
图 8、图 9为杂波影响下的差拍信号频谱与经过平均单元恒虚警检测(CA-CFAR)处理后的信号频谱,可以看出,CA-CFAR能够抑制杂波的干扰,检测到目标信号的频谱峰值. 图 10为CA-CFAR后对目标距离检测结果图,其仿真参数为:天线到蔗垄距离R=8 m,雷达工作频率fc=1.5 GHz,调频带宽B=1 GHz,甘蔗收割机移动速度v=1 m/s,甘蔗植株NRCS=-4 dBsm.由图 10可知,检测得到的距离为R0=7.987 1 m,检测误差为12.9 mm,检测误差在可接受范围内,本文的信号处理能够较好地抑制植被杂波的干扰,获得理想测距精度.
-
蔗地垄高检测精度要求较高,在植被覆盖的情况下,需要精确调整调频带宽B的大小.在甘蔗收割机静止时,调频带宽B对检测精度的影响如表 1所示,R表示雷达天线到蔗垄的真实距离,R0表示仿真系统检测的距离,假设R=8 m,由表 1的数据分析可知,随着调频带宽的增大,测距误差减小,当B=1 GHz时,测距误差12.5 mm,已经能满足甘蔗垄高检测的精度要求.综合成本等实际因素的考虑,本文选择1 GHz为最终的调频带宽.
雷达装载于甘蔗收割机之上,甘蔗收割机的移动会对测距的准确性造成影响.在田间工作时,为了保证收割质量,甘蔗收割机移动速度较为缓慢,最大为5 m/s.在调频带宽B=1 GHz,R=8 m时,甘蔗收割机移动速度造成的测距误差如表 2所示.由表 2的数据分析可知,甘蔗收割机由静止状态变为运动状态,测距误差从12.5 mm增大到12.9 mm,当移动速度逐步增加至5 m/s,测距误差仍为12.9 mm.仿真数据表明,雷达信号源随甘蔗收割机移动速度的改变对蔗垄高度检测误差影响较小.
目前没有针对植被覆盖密度、含水率、覆盖厚度等植被参数对雷达测距影响的研究,但是参数的改变会影响植被的NRCS,NRCS用于衡量散射体反射电磁波强弱的能力,不仅与物体自身的特性有关,还受雷达发射频率、入射角、极化方式等诸多因素影响,难以定量表述.当入射波频率为L波段(1~2 GHz),低入射角情况下,甘蔗在收割季节的NRCS的值的范围在0.05~0.4 m2[14],转化为分贝平方米对应的值为:-13.01~-3.98 dBsm.在本次实验中,假设NRCS从-13~-4变化.当植被的RCS变化时,信噪比(SNR)随之改变.在调频带宽B=1 GHz,R=8 m,v=1 m/s时,甘蔗植株NRCS变化对SNR与测距误差的影响如表 3所示.
表 3的数据为20次测试得到的平均值,由表 3数据分析可知,在-13~-4 dBsm区间,NRCS绝对值增大,SNR减小,系统误将杂波当作目标信号造成检测误差,导致检测误差增大,当NRCS等于-13 dBsm时,检测误差最大为32.6 mm.
天线到蔗垄的检测距离R的变化对雷达测距误差也会造成影响,依据成熟甘蔗植株高度(3~6 m)假设R的值从4 m变化至9 m,在调频带宽B=1 GHz,甘蔗收割机移动速度v=1 m/s,NRCS为-4 dBsm时,R的改变造成的测距误差如表 4所示.
由表 4的数据分析可知,雷达天线安装距离变化会影响测距误差.当检测距离R=4 m时,测距误差最大为32.7 mm,随着检测距离增大,检测误差逐渐减小,这是由雷达的调制带宽引起的,检测距离过小,雷达距离分辨率要求更高,但是更高的距离分辨率要求更大的带宽与更高的信号源,增加检测成本,32.7 mm的测量误差是试验允许的最大误差范围.
3.1. GUI设计
3.2. 信号处理
3.3. 仿真结果
-
该文设计了一个图形用户界面,利用LFMCW雷达实现甘蔗垄高的实时检测的仿真,仿真将植被的干扰用Weibull杂波分布代替,通过植被的平均雷达散射截面积建立联系,能够较好地模拟真实环境下的植被杂波分布.仿真分别测试了调频带宽、雷达波源随甘蔗收割机的移动速度、植被参数、雷达天线到蔗垄表面检测距离的变化对检测精度的影响,测试数据表明,检测精度与调频带宽成正相关;装载雷达波源的甘蔗收割机运动状态的改变对检测精度会造成影响,运动时的测距误差大于静止状态,在0~5 m/s的移动速度下,其误差最大为12.9 mm;植被参数改变导致NRCS变化,NRCS为-13 dBsm时,测距误差得到最大值为32.6 mm;雷达天线到蔗垄表面的检测距离的变化也会影响测距误差,当检测距离不低于4 m时,其误差最大为32.7 mm.仿真结果表明,本文的仿真算法能够处理杂波等造成的干扰,经过信号处理后的检测误差能够满足甘蔗垄高检测的要求.
 DownLoad:
DownLoad: