




-
开放科学(资源服务)标识码(OSID):

-
在直流微电网中,如何将微电网系统中分布式发电机(Distributed Generators,DGs)的发电成本降至最低并确保电网的经济运行一直是一个重要课题[1-2]。分布式发电机(包括风能、太阳能光伏、燃料电池、微型涡轮机等)通过电力电子设备连接到直流微电网的直流母线上,其运行成本各不相同,为了优化系统的运行成本,有必要进行经济调度[3-4]。
在直流微电网中,为了实现DGs之间的协调控制,通常采用3种基本的策略:集中控制、分散控制和分布式控制[5-6]。分散控制无需通信网络即可运行,而集中控制和分布式控制都需要通信网络。此外,在集中控制中,有一个中央控制器与所有本地控制器相连,以获取所有DGs单元的平均输出电压、平均输出功率等信息,并执行先进的控制策略[7-8];在分布式控制中,中央控制器被取消,所有本地控制器相互协作连接,从而提高了系统的可靠性和灵活性[9-10]。通过经济运行协调控制策略,使微电网系统的发电成本保持在最低水平[11]。
传统上,为了使直流微电网的总运行成本最小化,可以通过中央控制器进行集中控制,执行优化计算[12-13]。Fan等[14]提出了一种基于二次编程技术的控制策略,用于解决实时经济运行问题。该问题以基于单位成本曲线的二次目标函数为基础,通过在运行约束条件下使总运行成本最小化来确定可运行机组的最佳发电水平。目标规划技术和运行约束条件等被建模为线性方程/不等式,以确保即使在不可行的条件下也能获得最佳可用解决方案。
Chiang[15]在融合了改进遗传算法(Improved Genetic Algorithm,IGA)和乘数更新算法(Multiplicative Updating,MU)之后,提出了改进乘数更新遗传算法。IGA使用改进的进化方向算子和迁移算子,可以高效搜索和积极探索解;MU用于处理电力系统经济调度(Power Economic Dispatch,PED)问题的方程和不等式约束,可以更高效地解决具有阀点效应和多种燃料的机组电力经济运行。针对非凸经济运行问题,Chaturvedi等[16]提出了一种新的自组织分层粒子群优化算法,该算法更适合具有各种非线性的现代发电机组的成本曲线,当加入时变加速系数时,性能得到进一步提升。
上述集中控制方案具有高精度和可控性等优点,但它们也面临着通信和计算负担过重等问题,并可能出现单点故障。考虑到上述问题,Zhang等[17]提出了一种增量成本共识(Incremental Cost Consensus,ICC)算法。增量成本共识算法通过选择各发电机组的增量成本作为共识变量,以分布式方式解决了传统集中式经济运行问题。Binetti等[18]基于并联运行的两种共识算法,提出了一种具有输电线损和发电机约束的分布式电力经济运行算法。第1种算法是一阶共识协议,通过校正项进行校正,利用对系统功率不匹配的局部估计来确保发电需求相等。第2种算法使用“最新信息共识”的策略对系统中的功率失配进行估计,可以有效处理不同规模和拓扑结构的网络。
分布式控制不需要中央控制器,但不同的风电机组之间仍存在通信问题,而且共识算法的实施通常比较复杂。为了进一步提高系统的可靠性、可扩展性和经济性,需要开发一种完全分散的控制方式。Nutkani等[19]提出了一种基于成本的下垂方案,该下垂方案考虑了DGs之间运行成本的变化,从而重新定义了DGs的工作频率和电压,进而确定了DG的下垂特性。
本研究首先讨论了直流微电网的经济运行问题,当系统中各DG的增量成本相同时,系统总运行成本最低;而后推导和分析了系统运行过程中传统投切控制与母线电压和增量成本投切控制间的差异;为了使系统在负荷变化等动态过程中快速返回稳态,提出了可变垂度系统作为增量成本垂度控制,通过在动态过程中增大或减小系统垂度系数的大小,增强DGs释放或吸收功率的能力,使系统母线电压更快地返回稳态;最后,通过仿真和实验验证了该方法的正确性。
HTML
-
在直流微电网中,风电机组通过直流/直流变换器与直流母线相连,其电气原理如图 1。由于各种DGs的运行成本特性不同,为了优化系统的运行成本,必须进行经济运行的策略优化。为了提高直流微电网的可靠性、可扩展性和经济性,在直流微电网的变换器中采用了传统的基于增量成本(IC)的下垂控制策略,以分散的方式优化运行成本,采用这种技术后,DGs的IC与系统全局指标(频率或直流母线电压)的收敛性达到相等,而后根据每个DGs的IC自动实现功率分配,在不需要通信和中央控制器的情况下实现总运行成本的优化。
不同可调度DGs(柴油发电机组、燃料电池、蓄电池等)的发电成本包含许多因素,但一般可以用二次函数[20]表示:
式中:Ci(Pi)表示第i个DGs的发电成本;Pi表示第i个DGs的发电功率;ai、ai1、ai2表示第i个DGs的成本系数。
在电力系统常规经济运行的实际考虑中,对于有n个DGs的直流微电网,其经济运行目标是使总发电成本最小,由式(2)给出。系统的功率平衡要求的等式约束如式(3),每个DGs的发电容量限制的不等式约束如式(4)。
式中:Ctotal表示总发电成本。
式中:PD表示负载功率。
式中:Pi min表示最低的发电功率,Pi max表示最高的发电功率。
根据传统的拉格朗日松弛技术[21],假设所有DGs的额定功率不违反,当每个DGs的IC相同时,系统的运行成本最优。第i个DGs的增量成本定义为其成本函数的导数,表示为:
式中:ICi(Pi)表示第i个DGs的增量成本;ai1、ai2表示第i个DGs的成本系数。
当系统中所有DCs的IC达到相等时,系统运行在成本的最优点。由于直流微电网中存在全局状态,在稳定状态下,全局状态会自动强制所有DGs相等,例如交流微电网(MG)中的频率和直流MG中的直流母线电压,通过选择适当的全局状态作为系统指标并将其与IC相关联,IC的收敛将成为自动的。这是提出基于IC下垂控制策略的基本思想。
-
在直流微电网中,母线电压是一个全局状态,在稳定状态下,所有DGs应保持相同的母线电压,同时所有DGs的IC应收敛到最优工作点处。如果建立母线电压与IC的关系,则可以通过母线电压的同步来实现IC的收敛[22]。由传统下垂控制的P-V下降关系和公式(5)中的IC函数可知,母线电压与IC是线性相关的,由此可以建立母线电压与增量成本(V-IC)的下垂特性为:
式中:Vdc表示母线电压;Vref表示参考电压;dIC为直流MG中所有DGs的共同下垂系数。考虑到功率容量和最大母线电压偏差的约束,dIC由式(7)给出:
式中:Vdc,max表示最大母线电压;Vdc,min表示最小母线电压;ICmax表示最大增量成本。
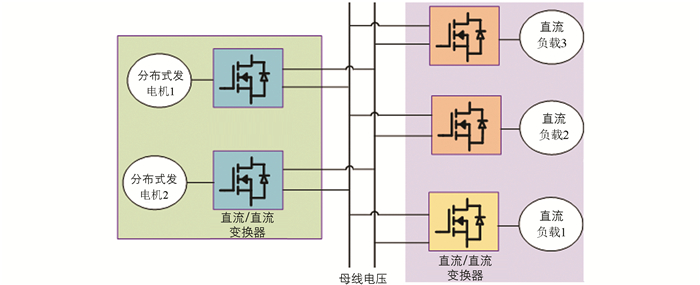
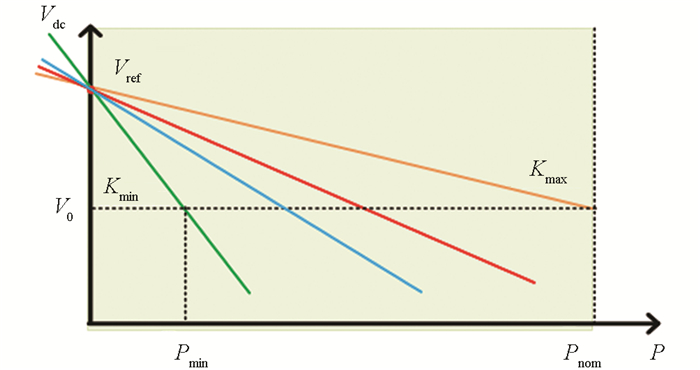
采用该V-IC的下垂控制方案,当DGs端子电压相等时,每个DGs的IC可以自动收敛到最优值。图 2说明了在提出的V-IC下垂控制方案下,两个DGs之间可以实现经济功率共享。DG1和DG2集成到公共交流母线上给负载PD供电,始终保持公式(8)中的功率平衡关系。
式中:P1为DG1的输入功率;P2为DG2的输入功率。
图 2的左侧表示为DGs的IC函数特性,右侧展示了所提出的V-IC策略特性。假设稳态前DG1提供P1,DG2提供P2,对应的IC分别为IC1和IC2。由V-IC下垂关系可以看出,DG1系统和DG2系统的端电压分别为V1和V2,且V2<V1。为了实现母线电压相同,DG1增加供电,DG2减少供电。当DG1和DG2分别与电源P1o和P2o达到母线电压相等时达到平衡点。此时的两个发电机组的IC在ICo处相等,平衡点是系统运行成本的最优点。
基于V-IC的下垂控制方案,可得到最优点ICo处IC的表达式,如式(9)。根据式(5)中的相关IC函数,可以得到第i个DGs对应的最优发电功率,如式(10)。采用所提出的V-IC下垂方案,实现了无互联线的直流微电网的最优经济运行。
式中:ICo表示最优增量成本;Vo表示最优点电压。
式中:Pio表示第i个DGs对应的最优发电功率;ai1、ai2表示第i个最优发电功率的系数。
1.1. 直流微电网系统框架
1.2. 基于母线电压与增量成本的下垂控制算法
-
基于V-IC的下垂控制方案,将直流微电网的母线电压和DGs的IC相互关联,当DGs端的母线电压相等时,每个DGs的IC可以自动收敛到最优值,此时系统保持经济运行[23],但V-IC的下垂控制方案只是考虑了系统的各个DGs稳态时的IC保持相等,并没有考虑到动态性能的调节能力。
为了解决这一问题,同时提高变换器的快速性和稳定性,改善直流配电网的电压质量,本研究提出了一种变下垂系数的增量成本下垂控制。该控制策略在负载功率波动瞬间通过调节变换器下垂特性曲线的斜率,快速释放或吸收能量,类似在直流侧增加了一个虚拟电容,通过虚拟电容的释放或储存能量,有效地改善系统的动态性能,并有利于防止电压的突变。
系统经济运行时DGs的V-IC下垂特性为式(6),为了在系统负荷变化时给直流侧电压提供快速的功率补偿,变下垂系数的增量成本下垂控制对V-IC下垂曲线进行了改进,新的下垂特性为:
式中:
$ k\left(\frac{d V_{\mathrm{dc}}}{d t}\right)$ 表示变下垂系数;ICj(Pj)表示第j个DGs的增量成本。变下垂系数项可以表示为:式中:K1为系统稳态时的下垂系数的倒数
$ \frac{1}{{{d}_{\text{IC}}}}$ ;K2为常数。由式(12)可知,
$ k\left(\frac{d V_{\mathrm{dc}}}{d t}\right)$ 是与$ \frac{d V_{\mathrm{dc}}}{d t}$ 成正比的变下垂系数函数。当直流母线电压保持不变时,$ \frac{d V_{\mathrm{dc}}}{d t}$ 为零,下垂系数保持K1不变,此时系统的下垂特性与V-IC下垂特性相同;而当母线电压受到扰动发生变化时,$ \frac{d V_{\mathrm{dc}}}{d t}$ 相应增大或减少,从而增大或减小DGs提供的功率,为直流配电网提供惯性支持;当电压恢复到稳态值时,下垂系数又恢复到K1。当DGs采用V-IC的下垂控制时,由可知变换器输入的增量成本为:
式中:IC′j表示第j个变换器输入的增量成本;ICref表示参考增量成本;k表示电压系数。
当直流微电网采用变下垂系数的增量成本下垂控制时,由式(11)和式(12)可知其变换器输入的增量成本为:
式中:K1和K2表示下垂系数。
结合式(13)可以得到:
DGs所连接变换器的直流侧电容两边的电压电流关系式为:
式中:Io和Ii分别为直流侧电容流向母线方向和变换器流向直流侧电容方向的电流;C为直流侧电容。两边同时乘以直流电压Vdc可得直流系统受到扰动时,直流侧电容的充放电功率,即:
式中:Pi为变换器流向变换器直流侧电容方向的功率;Po为变换器直流侧电容流向直流网络侧方向的功率。
联立式(5)、式(15)和式(17),替换其中的Pi,整理可得
式中:A为DGs增量成本与功率的等效换算常数。
等式(18)两边同时对时间积分得到:
式中:Wo表示变换器直流侧电容流向直流母线的能量;W′i为变换器流向变换器直流侧电容的能量。
若取Vref≈2Vdc,式(19)可改写为:
由此可知,采用基于变下垂系数的虚拟惯性控制相当于在系统受到扰动瞬间,等效增大了变换器直流侧的电容,该电容为虚拟电容Cvir,其大小为:
因此可以通过调节K2来调节虚拟电容值的大小。K2越大,虚拟电容值Cvir越大,虚拟电容储存的能量也就越大。
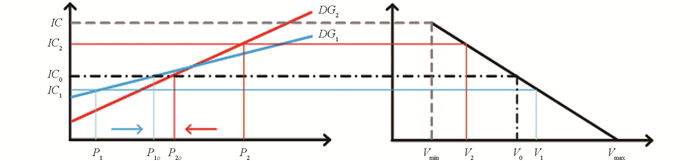
对于变下垂系数的增量成本下垂控制系统,当负载变化时,其变下垂特性示意如图 3。
从图 3可以看出,假设初始时刻,系统的下垂曲线为k1,此时系统运行在A点,母线电压为V1,DGs提供的功率为P0。当系统的负载发生变化,母线电压突然下降时,系统的运行点移至B点,按照传统下垂的控制方法,系统的运行点下降,DGs此时应该增加功率补偿,为P1。对于变下垂系数的增量成本下垂控制策略,在暂态过程中,母线的电压发生变化,此时下垂曲线也跟着发生变换为k2,下垂曲线的值变小,此时DGs提供的功率从P1增加至P2,DGs提供的功率增加,母线电压快速恢复稳定。当母线电压稳定时,下垂系数恢复为k1。
-
当系统的负载发生变化时,系统的变下垂系数项需要受到一定的限制。当负荷增加时,需要变换器快速提供功率,为直流电压提供惯性支持。但在DGs快速提供功率时,为了保证DGs发出的功率不超过其最大容量,需要对DGs的输出功率大小进行限制,即需要满足:P<Pmax,此时的下垂系数k<Kmax;为了保证系统的稳定运行,下垂系数也不应过小,因此需要对下垂系数的最小值进行限制,即k>Kmin。参数变化的限制如图 4。
从图 4中可以看出,假设系统稳定运行时,母线电压为Vo,DGs的额定功率为Pnom,为了让DGs安全运行,DGs的发电功率不能超过其额定功率,K2有最大值限制,即:
式中:Kmax表示最大下垂系数;Pmax表示DGs的最大发电功率。
同时为了保证系统的稳定运行,下垂系数也不应过小,DGs应该大于其最小发电功率Pmin,K2有最小值限制,即:
式中:Kmin表示最小下垂系数;Pmin表示DGs的最小发电功率。
由图 4的分析可知,在负载功率发生波动时,下垂曲线的变化幅度越大,DGs连接的变换器所能够提供的补偿功率也就越大。但在变下垂系数的增量成本下垂控制进行功率补偿的动态过程中,应保证在下垂系数变化不超过K2的前提下,充分利用下垂曲线的变化裕度,为直流电压提供最大的功率补偿。因此,对公式(12)所示变下垂系数进行优化,得到优化后的动态下垂系数为:
式(24)所对应的动态下垂系数的关系曲线如图 5。
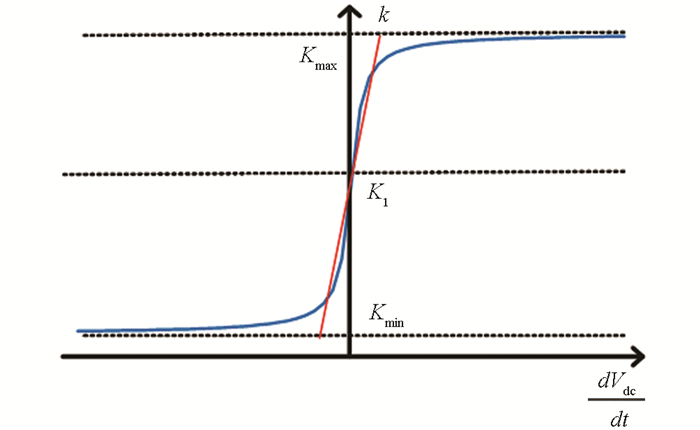
由图 5可以看出,当母线电压变化较大时,
$ \frac{d{{V}_{\text{dc}}}}{dt}$ 的值较大,根据反正切函数特性,此时变下垂系数项k会逼近下垂系数的极限值Kmax或Kmin,但不会超出极限值的范围,保证了DGs的正常功率和系统的稳定运行;当母线电压变化较小时,$ \frac{d{{V}_{\text{dc}}}}{dt}$ 的值也较小,根据反正切函数特性,此时$ k\left( \frac{d{{V}_{\text{dc}}}}{dt} \right)$ 的曲线斜率较大,使得较小的$ \frac{d{{V}_{\text{dc}}}}{dt}$ 对应的下垂系数k的值也很大,较小的负荷波动也能引起下垂曲线较大的变化,使得DGs能够提供较大的惯性。对下垂系数进行优化后,图 5还可以发现:当母线电压处于稳态时,
$ \frac{d{{V}_{\text{dc}}}}{dt}$ 的值接近0,此时变下垂系数项的值接近K1,与图中红色直线近似。由式(21)得到,这条直线的斜率与该变下垂系数的增量成本下垂控制的虚拟电容是线性关系,其值为:由式(25)可知,虚拟电容Cvir的大小取决于下垂系数的倒数K1、下垂系数的变化范围Kmax和Kmin、以及K2的取值。可通过改变K2的值来调节Cvir的大小,从而调节系统在发生动态时所能补偿的功率大小。
本研究所提出的变下垂系数的增量成本下垂控制策略,一方面可以充分发挥变下垂系数项的特点,在系统发生动态变化时,充分使用下垂系数项的变化范围,使用较大或较小的下垂系数值,为系统提供较大的功率补偿;另一方面,有效防止下垂系数变化过大,从而保证了系统的稳定。
2.1. 变下垂系数的增量成本下垂控制的提出
2.2. 变下垂系数项的设计指导
-
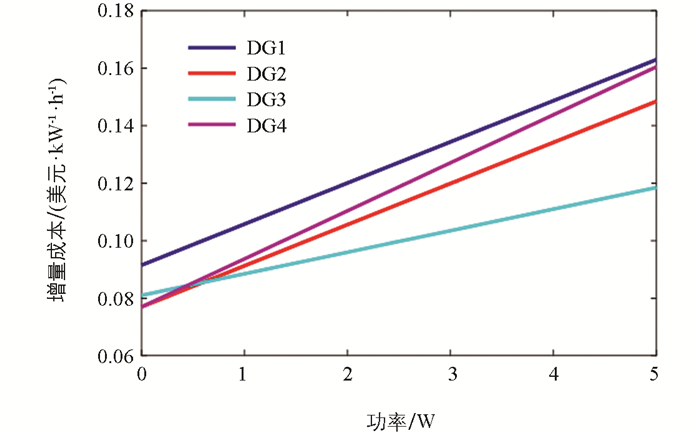
为了更好地体现变下垂系数的增量成本下垂控制和V-IC下垂控制在直流微电网动态时性能的差异,在Matlab/Simulink和HIL实验中搭建图 1中的电气模型系统框图,验证所提出的改进方法和分析结果,其中直流微电网的分布式发电机组由DG3和DG4组成,并通过BOOST变换器接入电网中,直流母线电压(Vdc)设置为360~400 V。4个DG具有相同的额定功率,4个DG的成本函数系数如表 1,BOOST变换器和电源的参数如表 2。根据式(5),各个DG的IC如图 6。基于式(7),V-IC下垂方案的系数为40/0.15。考虑线路阻抗为0.05 Ω。
-
假设数学模型与实际模型一致。
1) 验证V-IC下垂控制
在直流微电网中,DG3和DG4通过BOOST变换器连接到直流母线,给直流负载供电,其中BOOST变换器的控制基于双环PI控制。
直流负荷初始为1 kW,在2 s时,负载增加到2 kW。图 7显示了采用传统下垂方案下每个DGs的功率和IC的动态响应仿真结果,可以看出稳态时DGs之间的功率是相等的,但是每个DGs的IC不相等,无法实现经济运行,从而验证了直流微电网的仿真模型。
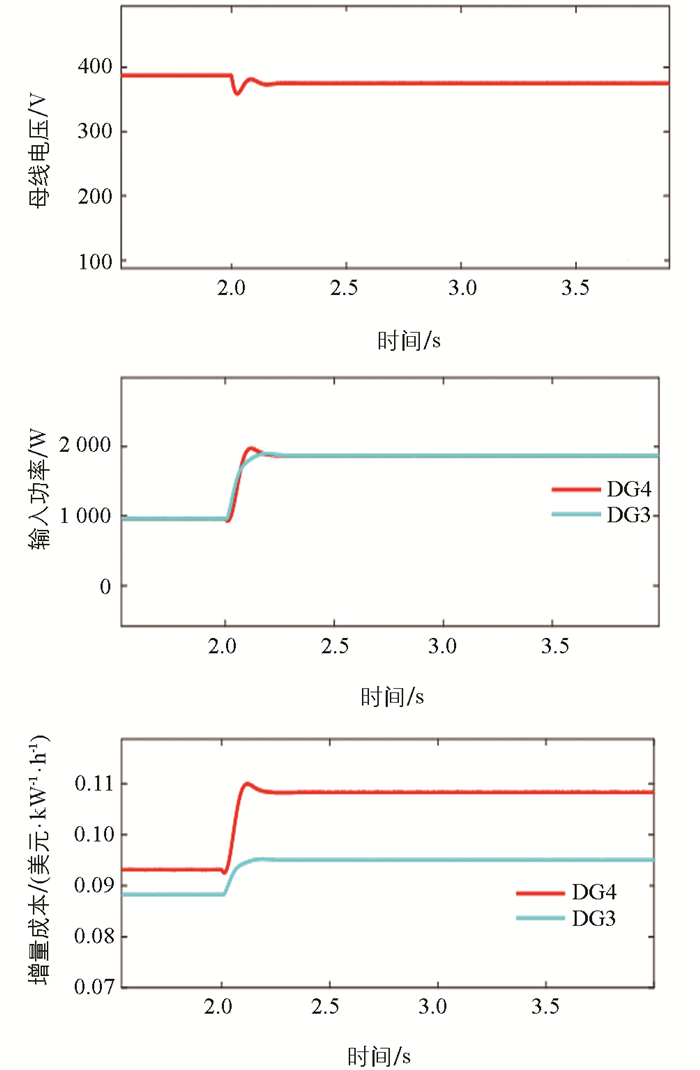
图 8为在相同负荷变化下,V-IC下垂控制方法的仿真响应。结果表明,在不同的负载条件下,当直流母线电压接近平衡点时,DGs的IC总是收敛到相等,各DGs根据IC特性进行最优发电,最大限度地降低了运行成本。
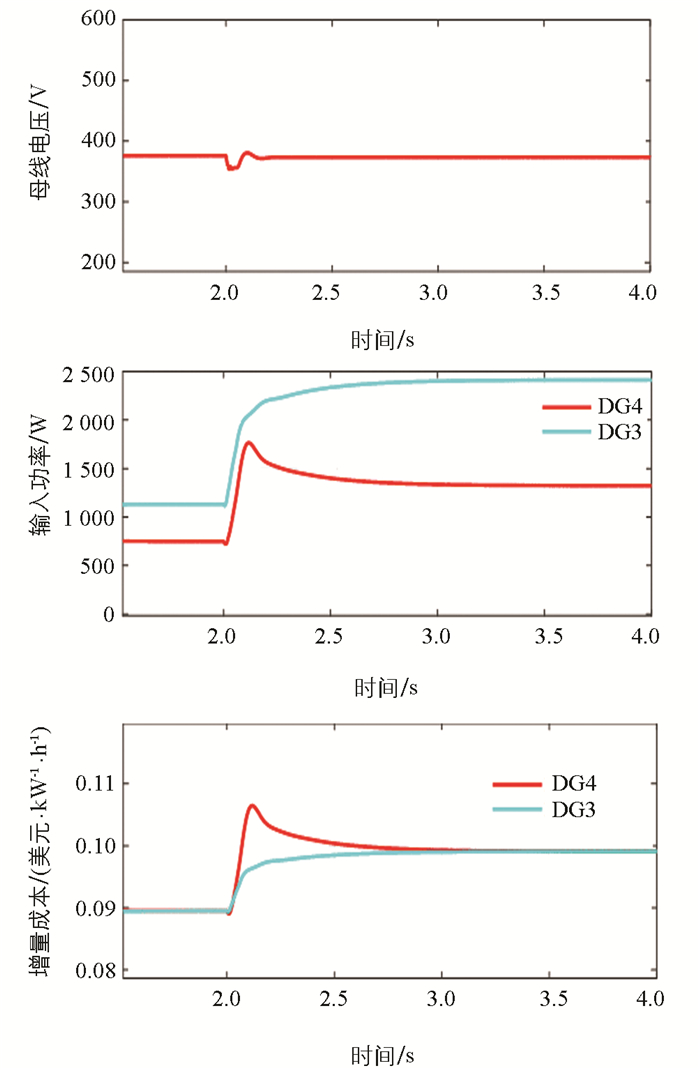
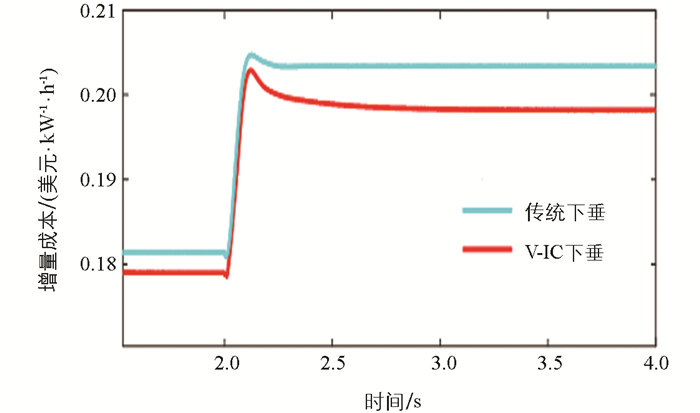
图 9为两种方法的总IC比较。两种负载条件下的总成本分别为:传统下垂控制下为0.181美元/(kW·h)、0.203美元/(kW·h);V-IC下垂控制下的总成本分别为0.179美元/(kW·h)、0.198美元/(kW·h)。与传统的下垂控制方法相比,所提出的控制策略使总运行成本分别降低了1.10%、2.46%,验证了所提出的V-IC下垂策略在直流MG经济运行中的有效性。
2) 变下垂系数的增量成本下垂控制和V-IC下垂控制的对比仿真
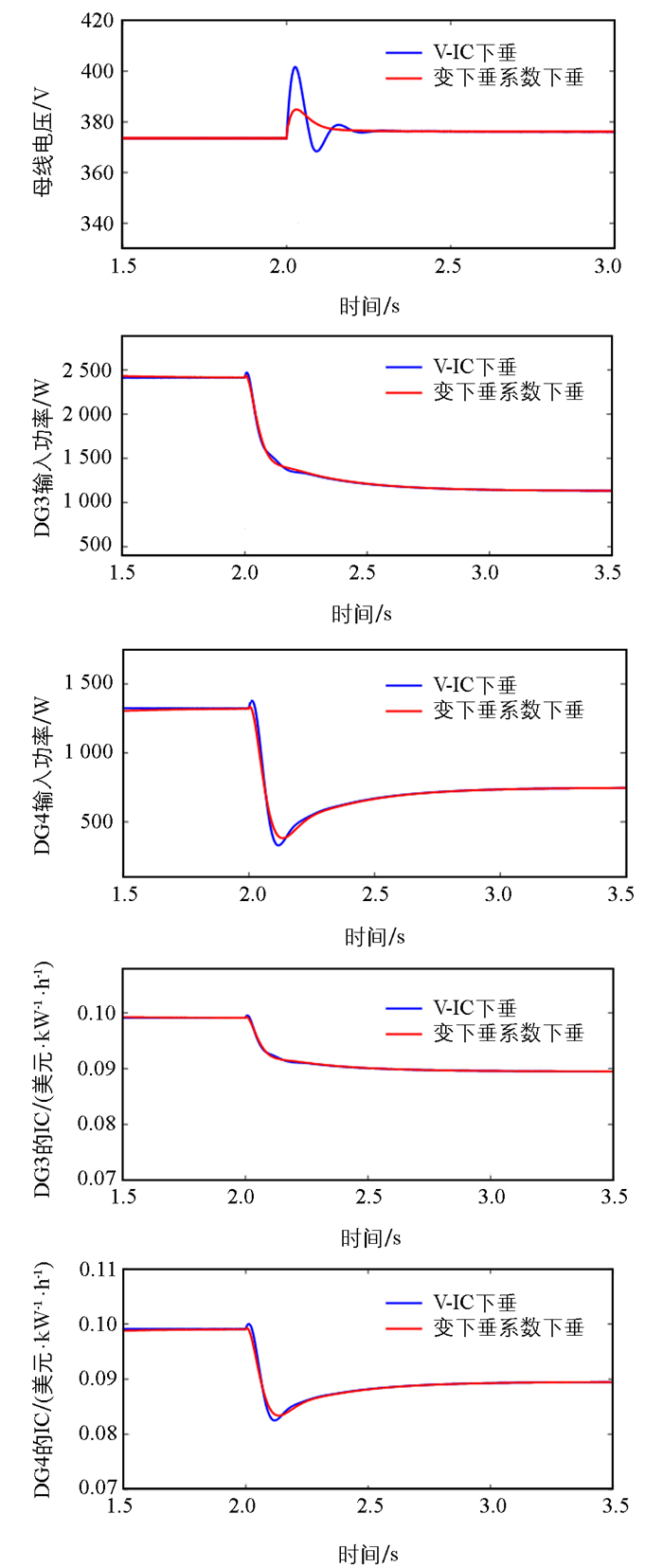
变下垂系数的增量成本下垂控制策略通过使V-IC下垂控制的下垂系数项变成一个随着母线电压的变化而变化的变下垂系数项,可以在系统发生动态变化时,为系统提供更大的功率补偿。当系统稳态时,直流母线的电压保持不变,此时变下垂系数的增量成本下垂控制和V-IC下垂控制的特性一样。图 10是负载功率从1 800 W跳变到3 700 W时变下垂系数的增量成本下垂控制和V-IC下垂控制的系统参数变化示意图。图 11是负载功率从3 700 W跳变到1 800 W时变下垂系数的增量成本下垂控制和V-IC下垂控制的系统参数变化示意图。
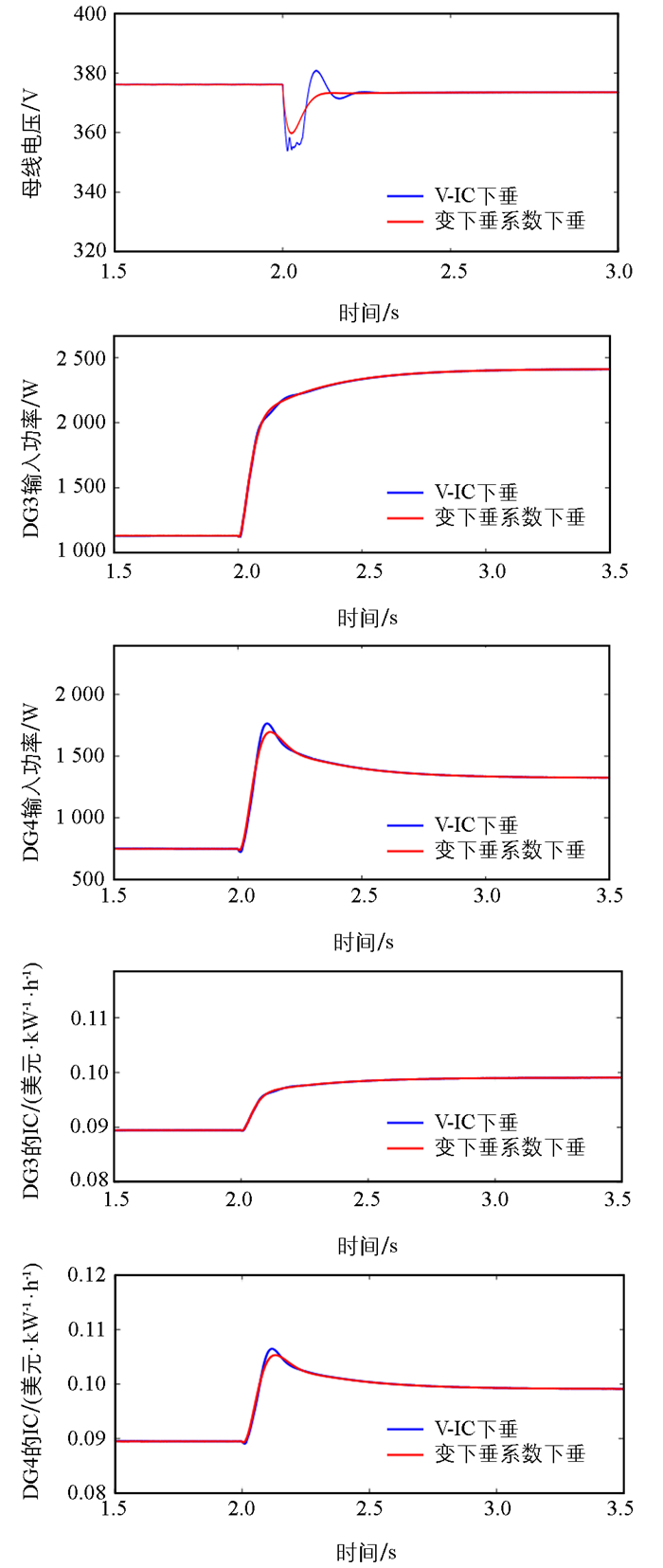
从图 10中可以看出,当负载功率提高时,变下垂系数的增量成本下垂控制策略的电压的跌落值为16 V,母线电压的恢复时间为0.101 s。V-IC下垂控制电压的跌落值为23 V,母线电压的恢复时间为0.209 s,且恢复过程中具有一定的超调量。与此同时,变下垂系数的增量成本下垂控制在DG4的输入功率变化和IC变化时,动态恢复过程中具有更小的超调量,动态性能更好。因此,具有变下垂特性的增量成本下垂控制方法具有更快的电网功率补偿速度,母线电压的跌落值更小,母线电压的动态性能更优秀,同时DG的动态过程超调量也更低。
从图 11中可以看出,当负载功率降低时,变下垂系数的增量成本下垂控制策略的电压抬升值为11 V,母线电压的恢复时间为0.118 s。V-IC下垂控制电压的抬升值为28 V,母线电压的恢复时间为0.186 s,且动态恢复过程中具有3次摆动。与此同时,变下垂系数的增量成本下垂控制在DG4的输入功率变化和IC变化时,动态恢复过程中具有更小的超调量,动态性能更好。因此,具有变下垂特性的增量成本下垂控制方法具有更快的电网功率吸收速度,母线电压的抬升值更小,母线电压的动态性能更好,同时DGs的动态过程超调量也更低。
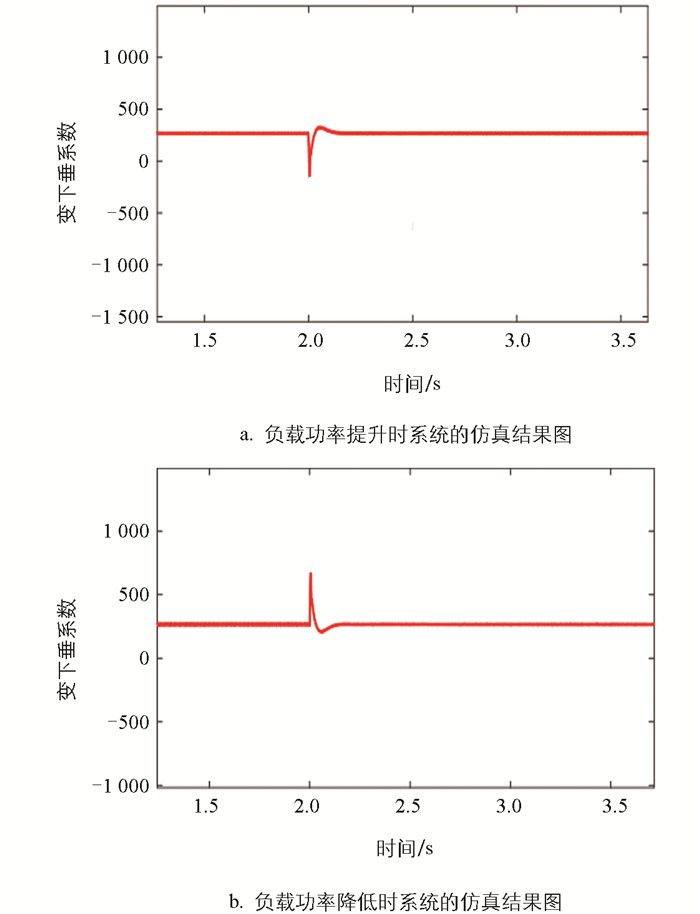
变下垂系数的增量成本下垂控制策略的变下垂系数项的变化曲线如图 12。变下垂系数项在稳态时保持恒定不变,只有在负载或系统发生动态变化时才会速度增大或减小,迅速吸收或释放功率,提高系统的动态性能。
-
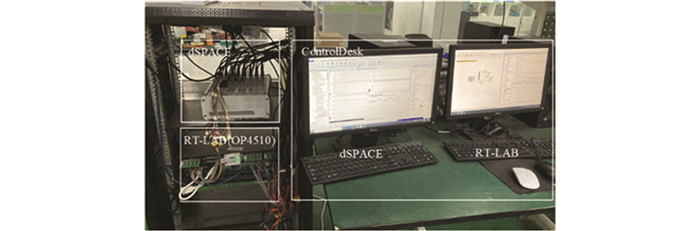
为了更好地验证所提方法的理论性,对变下垂系数的增量成本下垂控制和V-IC下垂控制进行了硬件在环平台的实验验证(HIL),实验平台如图 13。为了实验的合理性,实验参数和仿真参数保持一致,得到的实验结果如图 14、图 15。
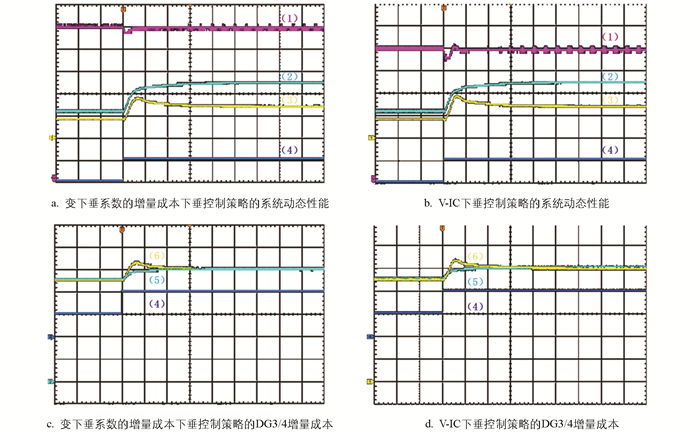
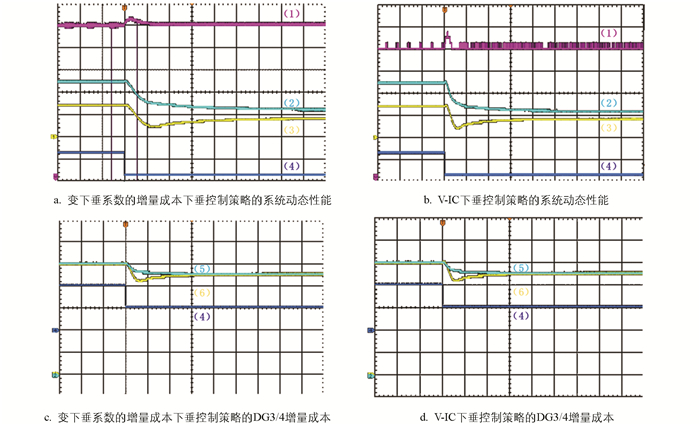
在图 14和图 15中,1号曲线表示母线电压,刻度为50 V;2号曲线表示DG3的输入功率,刻度为1 kW;3号曲线表示DG4的输入功率,刻度为1 kW;4号曲线表示直流母线的电流,刻度为5 A;5号曲线表示DG3的增量成本,刻度为0.02美元/(kW·h);6号曲线表示DG4的增量成本,刻度为0.02美元/(kW·h);水平时间刻度均为200 ms。
由图 14可以看出,当负载功率提高时,变下垂系数的增量成本下垂控制策略的母线电压跌落值为13 V,需要耗时0.08 s回到稳态水平,而V-IC下垂控制的母线电压跌落值为21 V,需要耗时0.125 s回到稳态水平,变下垂系数的增量成本下垂控制的直流母线电压的跌落值更小,补偿速度更快。
图 15显示,当负载功率降低时,变下垂系数的增量成本下垂控制策略的母线电压抬升值为10.5 V,需要耗时0.14 s回到稳态水平,而V-IC下垂控制的母线电压抬升值为40 V,需要耗时0.14 s回到稳态水平,变下垂系数的增量成本下垂控制的直流母线电压的抬升值更小,吸收速度更快。
另一方面,可以看到DG3和DG4的增量成本相同这一点在两策略下都成立,表明系统可以保持IC相同的经济运行,此时系统运行成本最优。
HIL的实验结果表明,所提出的变下垂系数的增量成本下垂控制在保证系统IC不变的条件下,明显提高了系统的动态性能,使得系统吸收和释放功率的速度变快,有利于母线电压的快速恢复。
3.1. 仿真和实验设计
3.2. 仿真结果
3.3. 实验结果
-
本研究提出了一种变下垂系数的增量成本下垂控制方法,首先推导了传统下垂控制和母线电压与增量成本下垂控制两种方法在系统运行过程中增量成本(IC)分布的差异,并通过分析和仿真验证了V-IC下垂方法可有效降低系统运行成本。在两种典型负载条件下,所提策略使系统总运行成本较传统下垂控制分别降低了1.10%和2.46%,验证了其在直流微电网经济运行方面的有效性。
在此基础上,引入变下垂系数项,构建变下垂系数的增量成本下垂控制策略,在母线电压发生变化时可动态调整下垂曲线,增强系统功率释放与吸收能力,提高动态性能。仿真和HIL实验结果表明,该方法在负载突变状况下具有更小的电压跌落值、更快的恢复时间,同时保持了各分布式电源IC的一致性,保障了系统的经济性。
仿真与实验验证表明,所提出的控制策略不仅能降低运行成本,还可有效提升系统的电压动态响应能力,在直流微电网应用中具有良好的实用价值。
 DownLoad:
DownLoad: