




-
搅拌反应器具有操作灵活、搅拌性能良好、经济效益好等优点,广泛应用于农业、化工、医药、生物发酵以及冶金行业等生产过程[1]. 搅拌桨作为搅拌反应器的核心部件[2],其结构设计和参数优化一直是学者们关注的重点[3-5].
仿生学是借鉴生物进化成果推进技术进步和理论创新的重要源泉,已被运用于军事、医疗、工业等多个领域[6]. 将搅拌桨设计和仿生学结合有助于开发出性能优良的搅拌反应器设备. 刘作华等[7-8]提出了一种仿生刚柔组合桨,设计思想源于鱼类、鲸类的游动和鸟类飞行,通过柔性身体的运动部位与周围流体相互作用,使能量以波的方式传递到流场远处,从而提高设备的能量利用率,实现流体高效、节能地混合. ZOU等[9]受生物体消化道混合过程的启发,设计了一种软弹性反应器,该反应器在高黏度流体混合方面具有优势. PIV (Particle Image Velocimetry)作为一种无干扰、瞬态和全场速度测量技术[10],可以测得一定范围内空间点上的速度分布信息,获得丰富的流场形状和流动特性[11-14],PIV技术已经成为研究流场结构的主要手段之一.
本文基于仿生学设计出一种新型鲸尾型搅拌桨,设计思想源于鲸鱼靠鲸尾推动前行,并搅动鲸尾周围液体[15],这正是搅拌系统所需要的. 本文提取鲸尾轮廓参数进行几何建模,以此制作成桨叶,替换RT(Rushton Turbine)搅拌桨上的直叶片成为一种新型鲸尾型搅拌桨,即WTT(Whale Tail Turbine)搅拌桨,并运用2D-PIV技术研究WTT搅拌桨的流场结构和混合性能,本研究可为搅拌桨设计提供一种新思路.
HTML
-
收集多张鲸尾图片,通过对比分析,本文确定了一张具有代表性的图片,如图 1(a)所示. 将鲸尾图片导入Matlab2018中进行图像处理,首先对图片进行二值化处理、中值滤波,然后经过Canny算法对轮廓提取,最后将轮廓线导入Matlab拟合工具箱进行曲线拟合. 考虑到鲸尾对称性,拟合出了图中5条曲线. 其表达式分别为
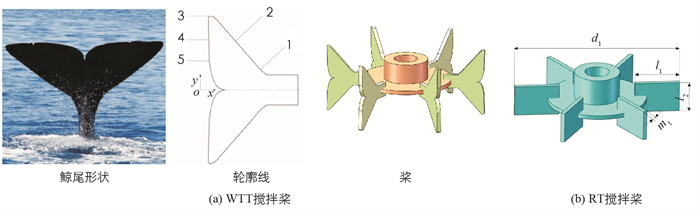
在Solidworks2014中画出这5条曲线,并将其制作成厚度(m1)为2 mm的搅拌桨叶. 为更好地研究该桨叶的性能,使其叶片面积与直径d1为80 mm的RT搅拌桨桨叶相同,如图 1(b)所示. RT搅拌桨的尺寸与化工行业标准HG/T3796.5-2005一致[16],尺寸参数如表 1. 将制作的新型鲸尾叶片代替RT搅拌桨的直叶片,形成WTT搅拌桨,该桨与RT搅拌桨有相同的直径. 考虑到3D打印技术加工的精确性和快速性,本文利用3D打印技术加工WTT搅拌桨.
-
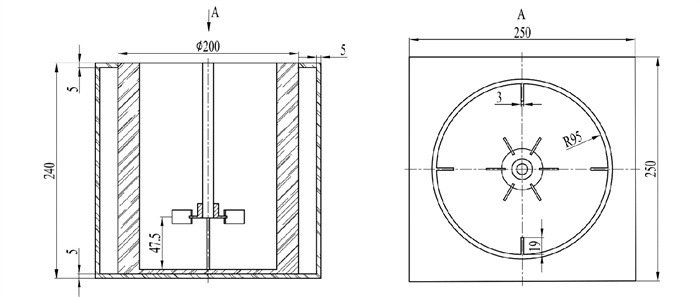
实验用的搅拌罐为平底圆柱型有机玻璃罐,为减小光折射对拍摄的影响,将圆柱型有机玻璃罐放置并固定在250 mm×250 mm×255 mm方形有机玻璃容器内,并且在圆柱型罐和方形有机玻璃容器之间加入纯净水,水高度和罐内的液体高度一致.
实验使用的搅拌模型和舒雷[14]选择的模型相同,其尺寸结构如图 2,搅拌罐D=200 mm,高H1=240 mm,壁厚m2=5 mm,罐内均匀分布4块标准挡板,挡板高H2=240 mm,宽l3=19 mm,厚m3=3 mm. 在实验过程中,搅拌桨分别采用RT搅拌桨和WTT搅拌桨,其尺寸大小与前述相同,搅拌桨叶中心平面距离罐底面高h=47.5 mm.
-
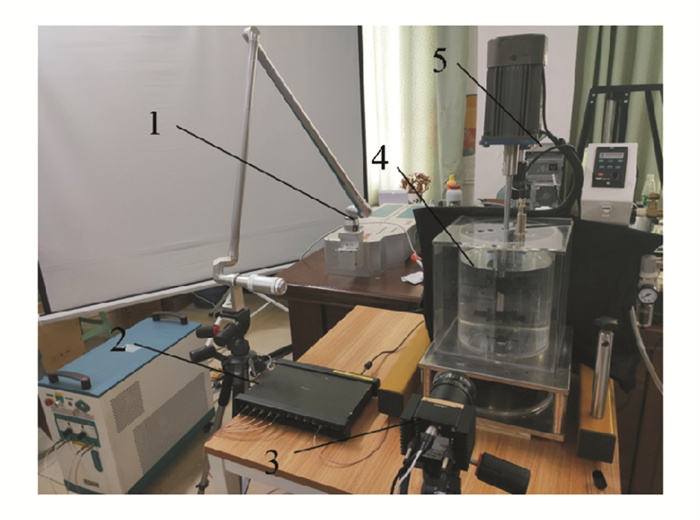
使用北京立方天地科技有限公司2D-PIV实验装置,如图 3所示. 主要由以下部件组成:Vlite-380双脉冲激光器(北京镭宝光电技术有限公司生产,脉冲频率1~15 Hz,波长532 nm);CLM-B204M-TF000 CCD相机(IMPERX公司,图像分辨率2048×2048,满帧采集速率30帧/秒);MicroPluse 725同步控制器(北京立方天地科技有限公司);软件MicroVec.V3.6(北京立方天地科技有限公司),HPZ44 Workstation Mini Tower计算机;霍尔传感器(NJK-5002C).
-
搅拌罐中水液面高度为190 mm,为减少水中气泡对实验准确性的影响,装好水后,静置4 h再进行实验操作. 对搅拌桨进行喷漆处理,目的是防止搅拌桨反光损坏相机,搅拌轴转速为120 r/min.
-
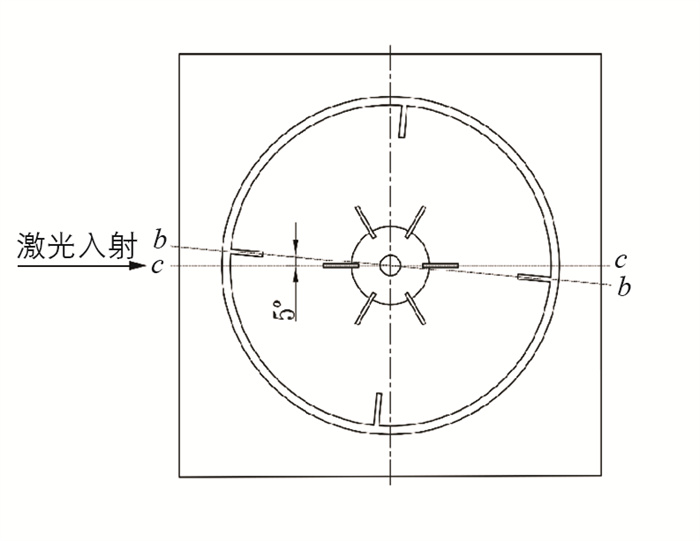
为避免挡板干扰激光平面的照射,两挡板产生的平面b-b与经过搅拌轴中心线竖直平面c-c夹角为5°,如图 4所示. 激光器产生的片光源与竖直平面b-b重合,厚度为1.5 mm. 相机拍摄区域为搅拌罐右下100 mm×100 mm区域[14]. 为获得角度解析的流场数据,即同一平面的流场数据,利用霍尔传感器实现锁相功能. 查询区域是PIV实验数据处理划分的最小区域,可以影响实验的精确性[12],本文查询区域大小设置为32×32像素,两相邻查询时间重叠50%.
-
跨帧延时时间参数设置不合适会导致拍摄的图像在后期处理时带来很大麻烦,甚至无法计算出正确的数据结果,因此在设定此参数时需要谨慎. 跨帧延时时间参数公式为[17]
式中:δt为跨帧时间,s;δd为最大像素位移,pixel;D为拍摄区域尺寸;vmax为流场最大速度,m/s;R为相机分辨率,pixel.
根据公式(6),跨帧延时时间参数设定为700 μs.
-
在相同转速下,搅拌罐内流体的速度会随时间变化而变化,同一点流体瞬时速度围绕其时均速度值上下波动. PIV测量的是流场瞬时速度,为了得到时均速度,需对实验结果进行多次采样取平均值. 实验记录了c-c平面的600副图像,即300组数据,对300组数据进行时均化处理,得到该平面的时均速度,将得到的结果导入Tecplot2014做进一步分析处理.
2.1. 几何模型
2.2. PIV实验装置
2.3. 实验操作与设置
2.3.1. 实验预处理
2.3.2. 拍摄平面与查询区域的选择
2.3.3. 跨帧延时时间参数调整
2.3.4. 数据采集和处理
-
为了更好地分析不同搅拌状态下流场的径向速度、轴向速度,对径向速度和轴向速度进行无量纲处理. 即径向速度、轴向速度分别除以桨叶尖端速度(Vtip=0.5 m/s),且分别记为Ur,Uz. 提取径向位置x=50 mm和x=40 mm两条轴向直线的速度数据,制作成图 5所示的4幅速度曲线. 图 5(a),(c)分别是在x=50 mm和x=40 mm处提取的轴向直线的径向速度. 图 5(b),(d)分别是在x=50 mm和x=40 mm处提取的轴向直线的轴向速度. z为搅拌罐内拍摄平面轴向位置,零点位于搅拌罐底部,x为搅拌罐内拍摄平面径向位置,零点位于搅拌罐壁面.
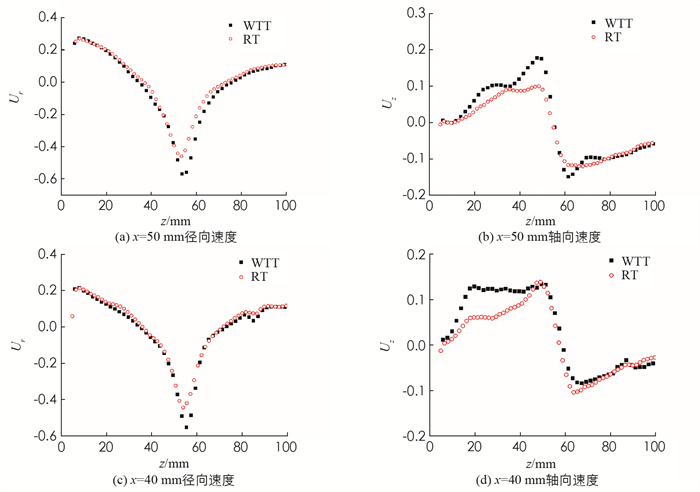
从图 5(a)可以看出,无论是WTT搅拌桨还是RT搅拌桨,搅拌罐内产生的较大径向速度都主要集中在z=40~70 mm之间,而这一高度和叶片安装高度大致相同. 在z=55 mm处,两者都出现了最大的径向速度,但是WTT搅拌桨的最大径向速度有所提高. 对整体而言,WTT搅拌桨产生的径向速度在桨叶安装高度范围内有略微的提高,但是不明显. 从图 5(b)可以看出,在z=55 mm时,轴向速度约为0 m/s,在z < 55 mm时,两者轴向速度先增大后减小,当z>55 mm时,两者的轴向速度,先减小后增大. 但是当z < 50 mm时,WTT搅拌桨产生的轴向速度大于RT搅拌桨产生的轴向速度,两者轴向速度相差明显. 由图 5(c)可知,两种搅拌桨在该位置产生的径向速度升降趋势和图 5(a)一致,但是由于离桨叶较远,两者的径向速度降低,另外,两者的最大径向速度差增大. 从图 5(d)看出,在z>50 mm时两者轴向速度相差不大,在z < 50 mm时,两者轴向速度差异明显,尤其是在z=20~40 mm之间时.
综上所述,WTT搅拌桨相比RT搅拌桨,可以提高最大径向速度和搅拌罐下部的轴向速度,而且远离桨叶时两者轴向速度差距更加明显.
-
图 6(a)是RT搅拌桨的流线图,从图中看出,在桨叶附近,流体水平向外壁面流动,当运动到搅拌罐壁面,流体改变方向,分别向上和向下运动,最终形成两个较大的主循环,这是典型的径向流搅拌桨产生的流场,这与施乃进等[13]观察到的流场一致,从侧面证明了实验的准确性. 另外除两个大漩涡以外,还形成两个较小的漩涡,主要是因为拍摄的平面距离挡板十分接近,流体打击挡板造成的漩涡. 图 6(b)是WTT搅拌桨的流线图,可以看出WTT搅拌桨形成上下两个主循环,这说明该桨也是一个径向流搅拌桨,且主循环涡的核心位置并没有改变.
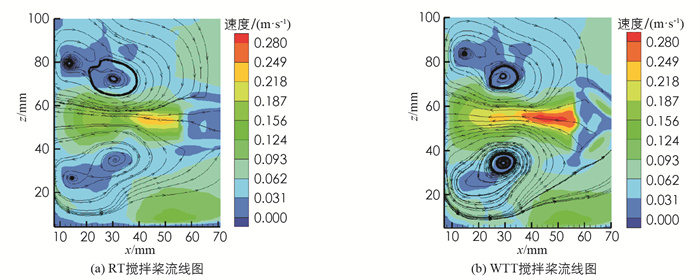
图 6(a)、图 6(b)同样是搅拌桨的时均流场图,对比两图可看出,在RT搅拌桨高度附近,速度范围主要集中在0.124~0.249 m/s,而WTT搅拌桨的速度范围主要在0.124~0.280 m/s,即WWT搅拌桨在搅拌桨高度附近可以产生更大的速度区域. 在搅拌罐底部,WTT搅拌桨产生的速度也有所提升. 总体来说,WTT搅拌桨可以产生更大的速度和混合区域,可促进流体的混合和能量的传递.
-
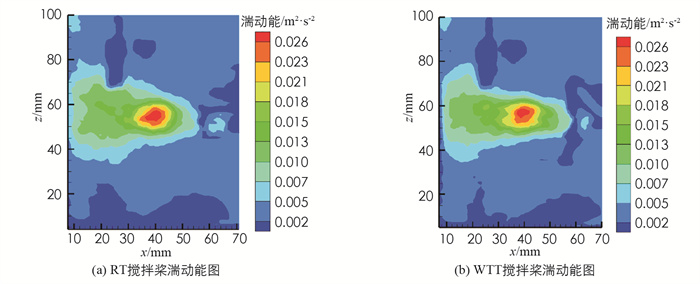
湍动能是衡量流场湍动指标之一,流场的微观变化情况与湍动能的变化息息相关. 图 7是两种搅拌桨状态下流场的湍动能图. 在2D-PIV实验中,湍动能的计算公式[17]为
式中:k为湍动能,m2/s2;
${\overline {{{u'}^2}} }$ 和${\overline {{{v'}^2}} }$ 分别为径向和轴向脉动速度平方均值,m2/s2.图 7(a)为RT搅拌桨的湍动能图,图 7(b)为WTT搅拌桨的湍动能图. 从图 7(a)可以看出,最大湍动能出现在z=40 mm,x=55 mm处,这是由于此处是上下两个主循环的交界之处,且较大湍动能主要集中在桨叶安装高度附近,其他地方湍动能较小,尤其是在槽底湍动能几乎为零,这不利于流体的混合. 图 7(b)看出,WTT搅拌桨的最大湍动能也出现在两个主循环交界之处,较大湍动能也集中在桨叶安装高度附近,另外在槽底部,湍动能有所改善.
-
最大李雅普诺夫(Lyapunov)指数是描述系统动力学特性的一个重要参数,它是指系统在相空间中相邻轨道间收敛或发散的平均指数率[18],常被用来判断系统是否处于混沌状态,如果系统的最大Lyapunov指数大于零,则该系统处于混沌状态,且指数越大,混沌程度越高,混合性能越好.
用PIV系统采集搅拌罐内典型点的速度时间序列数据,选取2个典型点,分别为P1和P2,其位置坐标(x,z)分别为(40,30)和(40,50). 两点径向速度、轴向速度时间序列如图 8所示,Ur表示径向速度,Uz表示轴向速度.
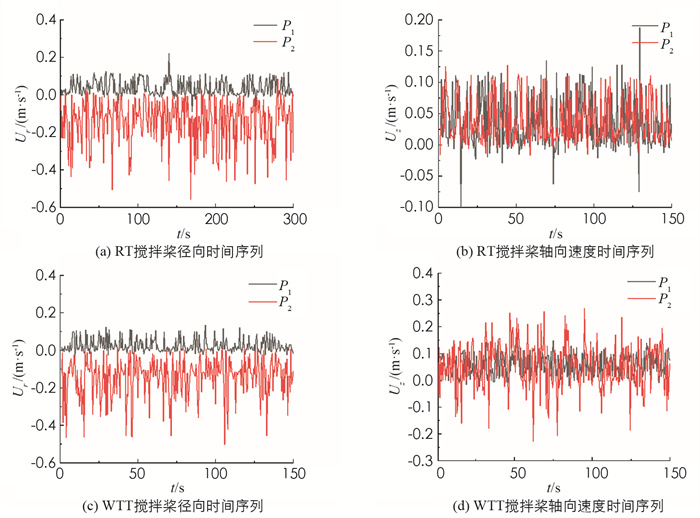
对时间序列进行傅里叶变换得到平均周期P,再用C-C算法计算出嵌入维数m和时间延迟t,得到结果如表 2. 再利用小数据算法计算出最大Lyapunov指数,结果如表 3所示. 其中,小数据算法思想[18]如下:
1) 根据时间延迟t和嵌入维数m重构相空间{Yi,i=1,2,…M},其中M为重构相空间中相空间点个数.
2) 找到相空间每个点Y′j的最近邻点Yj,并限制短暂分离,即:
3) 对相空间每一个点Yi计算出该邻点的i个离散时间步的距离dj(i)
4) 对每个i,求出所有j的lndj(i)平均y(i),即
5) 利用最小二乘法对所得的数据进行拟合,作出回归曲线,该直线的斜率就是所求的最大Lyapunov指数.
由表 3可知,在两种桨型状态下,各位置的最大Lyapunov指数均大于0,由此说明两种桨型产生的流场均处于混沌状态. 在P1点时,WTT搅拌桨的轴向速度和径向速度的最大Lyapunov指数均大于RT搅拌桨,径向速度的最大Lyapunov指数提高了55.9%,轴向速度的最大Lyapunov指数提高了3.6%,这说明在该点WTT搅拌桨可以提高流场混沌程度,且对径向速度的混沌程度提升更多. 在P2点时,WTT搅拌桨产生流场的径向和轴向速度的最大Lyapunov指数也大于RT搅拌桨,说明在该点WTT搅拌桨产生的流场混沌的程度更高. 同时注意到,径向速度和轴向速度的Lyapunov指数提升较大,尤其是轴向速度的Lyapunov指数提升63.4%.
3.1. 速度分析
3.2. 迹线图与时均流场图
3.3. 湍动能分析
3.4. 最大Lyapunov指数
-
本文运用仿生学原理,加工制作了一种鲸尾型WTT搅拌桨,并运用了PIV技术对该搅拌桨流场进行了研究,得到结论如下:
1) WTT搅拌桨相比RT搅拌桨,可以提高最大径向速度和搅拌罐下部的轴向速度,而且远离桨叶时轴向速度差距更加明显.
2) WTT搅拌桨可以产生更大的速度,这有利于流体的混合与能量的传递. WTT搅拌桨和RT搅拌桨的最大湍动能主要集中在两个主循环汇合处,但是WTT搅拌桨在槽底部的湍动能有略微提升.
3) WTT搅拌桨产生的轴向速度和径向速度的最大Lyapunov指数都是大于RT搅拌桨,即WTT搅拌桨拥有混沌程度更高的流场,更好的混合性能.
 DownLoad:
DownLoad: