




-
开放科学(资源服务)标志码(OSID):

-
病虫草害是阻碍农作物健康生长的主要因素. 目前,针对病虫草害的化学防治手段具有高效、快速、经济等特点,因而应用广泛. 但在传统的施药过程中,经常出现农药高效而利用低效的现象,导致药液流失于非靶标区域,造成药剂浪费、人畜中毒、环境破坏等问题[1]. 机械化植保作业可以根据特定靶标、作业冠层、种植模式合理地调整作业参数,有效解决病虫害化学防控中施药过量的问题[2]. 相较于其他植保机械,植保无人机表现出更好的灵活性和便捷性,易于控制且操作强度低,一定程度上不再严格受到地形的限制,能深入水田、山坡等地面机械难以进入的区域,因而防治范围更广. 植保无人机精准施药技术能够根据田间作物的生长发育阶段和病虫草害状况,按需对作物喷施农药,可显著提高施药作业效率、增加农药的有效利用率,有效减少施药过程中农药对操作者的危害和操作的危险系数,极大地降低了农药中毒的发生[3]. 目前,我国多个地方政府已经和国内一些无人机厂家达成合作协议,进行无人机植保作业的试点工作[4]. 可见,植保无人机对发展高效农业、精准农业具有重大意义,本文将对植保无人机的研究与应用现状,以及植保无人机施药技术的发展进行系统分析.
HTML
-
植保无人机与传统植保机具相比,具有作业效率高、成本低、环境污染小、机手安全性高、适用性强等优势,现已广泛应用. 市场上的植保无人机根据动力系统的不同,可分为电动、油动、混合动力3类;根据升力结构不同,可分为固定翼、单旋翼、多旋翼3类. 固定翼植保无人机续航时间长、飞行稳定性好,但必须有起降专用跑道;单旋翼油动植保无人机可垂直起降,无需跑道,飞行灵活,续航时间较长,但其结构复杂,制造和维护成本高;多旋翼电动植保无人机价格低且结构简单,易于操作和维修保养,能垂直快速起降,但其载药量少、续航时间较短[5].
-
美国和日本的农业航空植保技术发达,在装备智能化和专用药剂等方面处于世界领先水平. 在美国,超过40%的农田通过航空植保技术进行管理,水稻和森林植保作业完全依赖农业航空. 另外,美国政府认为在同种作物大规模连片种植模式下,小型植保无人机的低量喷雾技术虽然能产生更细的雾滴,但也会增加农药飘移的风险. 此外,由于无人机的载药量有限,其综合成本实际上高于大型有人驾驶植保飞机. 故美国农业航空植保机具以有人驾驶固定翼飞机(占比约87%)和旋翼机(占比约13%)为主. 澳大利亚、加拿大、巴西和俄罗斯等国由于农田作业环境相似,户均耕地面积较大,所用的航空植保机具与美国类似,农用飞机作业机型也以有人驾驶固定翼飞机和旋翼机为主[6].
目前,日本是全世界植保无人机普及率最高、相关技术最先进的国家,无人机已经成为该国农业植保的主力军,其中雅马哈(YAMAHA)公司的无人机技术尤为突出,经过几十年的发展和技术积累,雅马哈植保无人机几乎能满足农户对植保无人机的所有使用要求,如快速更换动力(油箱或者动力电池)、药水快速补充或药箱快速更换、定高飞行、自动起飞及根据地形变化的仿地飞行等,加之操作简单且飞行稳定性极佳,因此雅马哈无人机在世界农用无人机市场上占有率很高. 现阶段,日本的植保无人机以雅马哈公司生产的RMAX系列无人直升机为主,该系列直升机每年在日本的播种、施肥和植保作业面积超过97万hm2,被誉为“空中机器人”.
韩国在2003年左右开始引进国外先进的植保技术,迅速推动无人机在农业植保领域的应用,经过十几年的发展,韩国的无人机植保行业也已初具规模. 但韩国本身并不生产农用无人机,主要依赖引进日本的设备及施药技术. 此外,俄罗斯在无人机植保领域也不甘落后,据统计,其国内植保无人机的保有量超过11 000架,服务范围超过俄罗斯国内耕地面积的1/3 [7].
-
中国的农业航空起步较晚,最早可追溯至1951年,从探索、起步、发展直至成熟历经70余年. 1951年,我国首次使用了固定翼飞机进行蝗虫灭杀、森林播种及防火. “Y-5B”作为早期有人驾驶固定翼飞机的代表机型(图 1a)[8],发挥了重要作用. 随后,随着科技的进步和国家政策的支持,农业航空领域得到了快速发展. 2008年,“863”计划项目“水田超低空低量施药技术研究与装备创制”正式启动实施,意味着中国开始了植保无人机航空施药技术的正式探索[9],国内第一款18旋翼植保无人机“3WSZ-15”于2010年研制成功(图 1b). 2015年,首批植保无人机补贴试点在湖南和河南两省展开,自此植保无人机在国家的大力推广下实现了快速发展. 同年,各类资本开始进入中国商业植保无人机领域,诞生了一批以大疆、极飞等为代表的植保无人机机型(图 1c、图 1d),进一步推动了农业航空的发展. 目前,各大企业都在积极研发植保无人机的自动避障、防撞、全自动飞行等智能化技术,每年推出最新款研究成果,不断提升农业航空的技术水平和应用效果.

1.1. 国外研究现状
1.2. 国内研究现状
-
植保施药技术的创新旨在实现农药的减施增效,达到降低成本、减少环境污染和药物残留的目的. 目前,该技术领域的创新涉及用药量、混药、施用过程等各环节的优化,主要包括精准变量施药技术、精准在线混药技术、精准对靶施药技术和喷雾飘移控制技术. 此外,植保用药与生物防控技术的多元化发展,也在不断推动航空植保施药技术的进步[10].
-
精准变量施药技术依据作物病虫害及草害的发生程度和生长状况,通过处理已获取的田间信息来制定用药决策,并通过调节施药控制系统参数,实现精准施药. 该技术的实现主要依赖2个关键环节,即施药决策的生成与决策执行. 前者的核心在于创建融合地理信息的处方图和实时解析传感器数据;后者侧重于施药系统传感器类型的选择、变量施药控制方法和算法的优化.
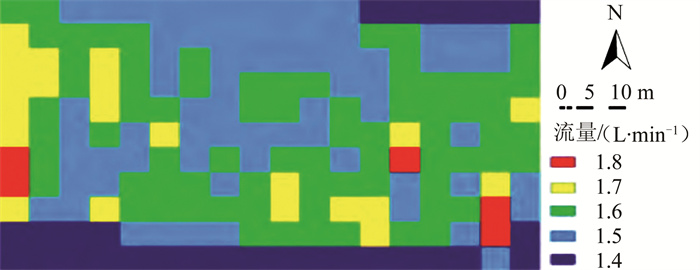
精准变量施药技术按需用药的理念有效降低了农药用量,减少了资源浪费和环境污染. 闫春雨等[11]使用无人机搭载的多光谱相机,在棉花脱叶剂喷洒前后,连续4次收集田间数据,建立了最优的监测模型,并据此生成作业处方图指导施药(图 2),成功节约了7.39%的农药使用量.
-
精准在线混药技术是将药剂与水独立存放,在施药作业时按照所需用药浓度实时在线混配进行施用的方法[12]. 现有的混药方式主要有直注式、旋动式和射流式3种. 直注式是通过支流管路,将药剂和水分别加压后混合[13];旋动式是在直注式的基础上,增加了起旋器和螺旋收缩管,以提高混药效率和均匀性[14-15];射流式则是利用文丘里效应,在高压清水流的作用下吸走药液,实现药剂与水的混合.
精准在线混药技术有效解决了传统预混式配药的混药不均匀和用药浓度无法实时调整的问题,减少了施药人员与农药的直接接触. 混药方式和混药器的设计与优化是影响混药配比效率与质量的关键. 房开拓等[16]以非弹性介质的动量计算为切入点,通过理论推导、仿真与试验相结合的方法,总结出一组用于射流式混药器设计分析的特性方程.
-
精准对靶施药技术是精准变量施药技术的基础. 变量施药前,农机需要准确获取施药靶点或区域,然后根据病虫草害的发生程度进行变量施药. 精准对靶施药技术的关键在于目标物的检测,目前已有红外线、超声波、激光雷达、机器视觉、光谱成像和多传感器融合等检测方法[17].
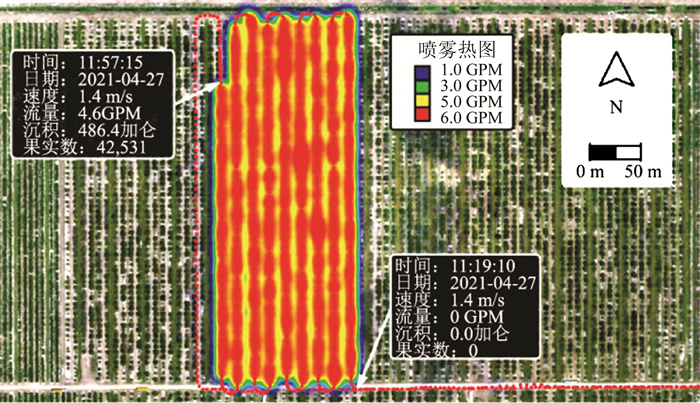
精准对靶施药技术进一步减少了药剂的用量,Partel等[18]使用多传感器融合检测施药靶标,并分类、变量喷施,有效减少了28%的施药量. 图 3为无人机具对靶变量喷施的施药处方图与作业轨迹. 但该技术在靶标识别方面仍需要进一步提高传感器识别效率、减少施药延时、提升检测准确性以及提高对靶定位精度等.
-
喷雾飘移控制技术是指向靶标沉降的农药雾滴受环境气流影响而向非靶标区域运动的现象. 影响雾滴飘移的因素主要分为两方面:一是自然风与作业机具风场耦合的环境气流;二是药滴粒径、动量等自身特性[19]. 目前,喷雾飘移控制技术主要包括改进喷嘴结构、优化喷施风场、防飘助剂研发、建立飘移风险预测和控制模型等.
在防飘助剂研发方面,相关研究集中于开发能够减少风场胁迫、分布均匀性更好、具有更高覆盖密度与沉积量雾滴群的药剂. 张海艳等[20]以雾滴在作物叶片表面的碰撞模型和雾滴拦截模型为基础,建立了用于植保无人机施药雾滴黏附量分析预测的模型,并开展了助剂对药液性质、雾化效果、雾滴沉积特征的影响试验,与清水相比,添加1%迈飞与0.5%迈图Target助剂溶液可使每公顷水稻田的雾滴黏附量分别增加800.78%和1 051.49%. 为分析助剂对药液防治效果的影响. 郑发娇等[21]测试了4.5%联苯菊酯水乳剂在不同浓度(1 000、1 500、2 000倍液)下分别添加0.1%有机硅表面活性剂、Silwet 408、矿物油、渗透剂JFC-2助剂的效果,发现与未添加助剂相比,各浓度的4.5%联苯菊酯水乳剂在添加助剂后的田间药液持留量增加了15.22%~41.96%,田间防效增加5.26%~30.03%.
在飘移风险模型探索方面,研究主要集中于飘移风险预测和控制模型的探究. 邹雄等[22]以多相流理论与质点运动学方法为基础,分析了雾滴直径、初始速度、风速与无人机飞行高度、速度对雾滴飘移的影响,证明雾滴的飘移距离与喷施雾滴的初始速度角度呈二次函数分布,特定条件下,雾滴初始速度角度为20°时的雾滴飘移距离最短. 倪佳胜等[23]结合CFD仿真模拟与风动试验数据,建立了气流速度、喷施高度和雾滴粒径对雾滴飘移距离影响的多元线性回归模型,该模型对雾滴飘移量的预测精度可达83.9%.
2.1. 精准变量施药技术
2.2. 精准在线混药技术
2.3. 精准对靶施药技术
2.4. 喷雾飘移控制技术
-
无人机精准施药技术可以针对田间作物的生长发育阶段和病虫草害状况,按需对作物喷施农药,显著提高施药作业效率,增加农药的有效利用率,并且减少对人体危害和对作物的损伤,因此,精准施药技术得到植保行业的高度重视,发展势头迅猛. 目前农业航空精准施药技术在我国植保领域仍处于发展阶段,应用前景非常广阔.
-
1) 植保农业无人机装备系统有待进一步完善.
一方面,无人机施药专用喷头性能亟待提高,对无人机专用喷头的深入研究和开发投入不足. 施药过程中,大多是将地面植保机械所使用的喷头直接用于植保无人机,针对无人机施药专用喷头的使用需求及选型缺乏依据,欠缺对作物病害、药剂、无人机类型和作业环境等多方面因素的综合分析,与精准施药的定义相距甚远,极易引起农药浪费和环境污染.
另一方面,植保无人机在使用过程中普遍存在承载量小、航行时间短等问题. 随着土地流转的增加,市场对高航行时间、高运载量的无人机需求量会越来越多. 因此,对无人机的飞行时长和载药量进行有效改善,可全面提高无人机在农作物灾害防治方面的作业效率.
2) 植保无人机施药规程与施药评价系统有待建立.
首先,目前仍缺乏针对不同作业场景实际施药具有指导意义的细化系统研究. 如对于不同的作物、农药和助剂类型及其防治机制,需要细化相应的喷雾参数(包括喷射压力、喷嘴安装角度、喷施量、喷施次数和喷雾时长等) 和无人机飞行参数(无人机类型、飞行高度和飞行速度等).
此外,无人机施药结果的评价体系尚未完善. 无人机施药质量与喷雾特性参数(如喷头型号、喷雾压力、喷雾角、雾滴粒径和农药剂型)、飞行参数(飞行高度、飞行速度和旋翼特征) 和气象环境(风速、风向、温度和湿度) 密切相关,而这些影响因素是可控、可测和可选择的. 然而,现有的大量研究均根据无人机施药某个或某些参数和效果的测量结果得出一定结论,缺乏测试方法的技术规范和对测量结果的评价标准.
-
1) 深度融合AI技术,提升植保无人机智能化作业水平. 在断点续喷、自动定高和自动避障等涉及全自动控制技术方面进行突破和发展,将人工智能(Artificial Intelligence,AI) 技术引入精准施药系统中,提高无人机对环境的自适应性能,以解决农业从业者操纵植保施药无人机难度相对较高的问题,使无人机精准施药技术尽快得到推广应用. 随着科技的快速发展,实现障碍物的快速识别与主动避障将是植保无人机智能化发展的必然趋势.
2) 加强药械与施药技术结合度,完善植保无人机精准施药系统. 在精准施药综合系统中,不断总结和积累此领域的研究和应用成果,将农药特性及研发、施药技术与无人机技术研发有机整合,加大航空施药专用喷嘴研发等薄弱环节的投入力度,形成合理有效的精准施药系统体系.
3) 以生产需求为导向,建立面向不同施药作业场景的植保无人机施药参数规程. 针对我国无人机施药现状和农药防治效果要求,在小麦、玉米和林果等典型靶标冠层区域,通过试验测量和计算机模拟仿真等办法,研究无人机飞控参数、喷雾参数和气象因子等因素对喷幅、农药雾滴沉积和飘移特征的影响,建立参数优化方程,确定最佳的作业参数,制定农业航空精准施药的测试方法和技术规范,形成植保无人机精准施药评价方法体系.
3.1. 存在的问题
3.2. 突破方向
-
加快植保无人飞机的推广应用是我国现代农业建设的需要. 目前,应用实践已经证明,植保无人机及其施药技术不受作物长势和地势限制,在提高作业效率、节本增效等方面具有不可替代的优势,因而在我国取得了极大的技术进步和应用推广. 随着经济的发展,中国面临着人口老龄化和城镇化发展带来的农村劳动力不足的严峻形势,且由于单体农户的小规模生产模式的存在,为了保障我国农业的稳定和可持续发展,加快实现农业机械化和现代化的进程,特别是山区与水田的全程机械化作业水平,已经成为中国国家层面的发展战略,植保无人机及其低空低量施药技术取代传统人力背负式喷雾作业,既符合当前中国农业现代化发展的要求,又在较大程度上提升了中国植保机械化水平.
另外,从日本等发达国家植保无人飞机的发展历程以及国内的市场需求来看,植保无人机市场前景非常广阔,其应用领域也在不断拓展. 植保无人机在中国是一个新兴产业,植保无人机及其施药技术与装备也处于不断发展之中,为保证植保无人机的健康发展和推广应用,深入研究植保无人机及其低空低量施药技术的重要性不容忽视;同时,更好地理解和掌握植保无人机施药技术有助于植保无人机及其喷施部件的设计和优化,促进农药的高效使用,对中国植保无人机市场的健康有序发展具有重要的促进意义.
 DownLoad:
DownLoad: