




-
开放科学(资源服务)标识码(OSID):

-
农业是国民经济的基础,其现代化进程离不开先进农机装备的支持。随着科技的进步,自走式、智能化和高度自动化的农机装备已成为农业发展的必然趋势[1]。尤其在丘陵山区,地形复杂,耕地多为“鸡窝地”和“巴掌田”,大型农机难以适应此类作业环境。因此,小型轻便、自走式农业机械凭借其灵活性和适应性,逐渐成为该地区农业机械化发展的主流[2-3]。
自走式农机装备在无人值守运行时,必须对其运行状态进行实时监控,以确保其可靠性和安全性。传统的传感器监测方法虽然有效,但在电源供给和恶劣环境下的线缆布置方面存在巨大挑战[4]。近年来,振动能量俘获技术的发展为解决这些问题提供了新的思路。随着振动能量俘获技术与微电子技术的协同进步,基于能量俘获的动力设备状态监测研究取得了显著成果[5]。朱新傑等[6]基于LabVIEW设计了一套用于秸秆还田机的振动监测与分析系统,实时监测秸秆还田机运行状态。罗梦婷等[7]与苑泽坤[8]提出了压电-摩擦复合式振动能量采集器,用于智能轴承运行状态监测设备的供电。刘建政等[9]提出了压电-电磁-摩擦复合能量采集器,用于煤矿装备工况的实时监测。李守太等[10]与Chen等[11]提出了基于振动能量俘获技术的轨道道岔转辙机自供能传感器系统,利用轨道振动能量为拉杆插销附置的应变传感器和无线数据传输系统供电。孙玉华等[12]基于钢轨振动能量提出了一种在线波磨原位监测方法。路永玲等[13]利用微风振动能量回收,实现了对风速的实时监测。王旭东等[14]提出了一种压电-机械电磁复合式振动能量采集装置,用于回收拖拉机产生的振动能量,延长电动拖拉机的续航时间。Wang等[15]将电磁式能量俘获系统安装于皇竹草收割机割台处,利用割台高度变化和地面激励产生电能,通过能量管理电路为传感器实现自供电。Wang等[16]、章亚栋[17]、Tang等[18]提出了基于微风振动的摩擦电纳米发电机,构建了在线监测设备的电量自供系统。Tommasino等[19]与Holzmann等[20]采用应变压电能量俘获系统,直接利用航空部件振动产生的应变将振动能量俘获,用于航空部件传感器的自供电。Wang等[21]与Kang等[22]提出了高性能压电振动能量收集器,用于无线监控系统的电能自供给。
针对自走式玉米收获机运行状态监测实时性不足的问题,本文提出了一种基于机器振动能量的实时在线监测方法。通过设计电磁式振动俘能器,实现对自走式玉米收获机多工况振动能量的实时采集与转换,并建立电磁式振动俘能器输出响应与机器运行状态的映射关系。通过对比实测加速度信号与电磁式振动俘能器输出响应的时域特征和频域特征,验证该系统收集机器振动能量的有效性,以及通过输出响应准确识别机器运行状态的能力,以期为自走式农机装备的状态监测提供新的技术路径。
HTML
-
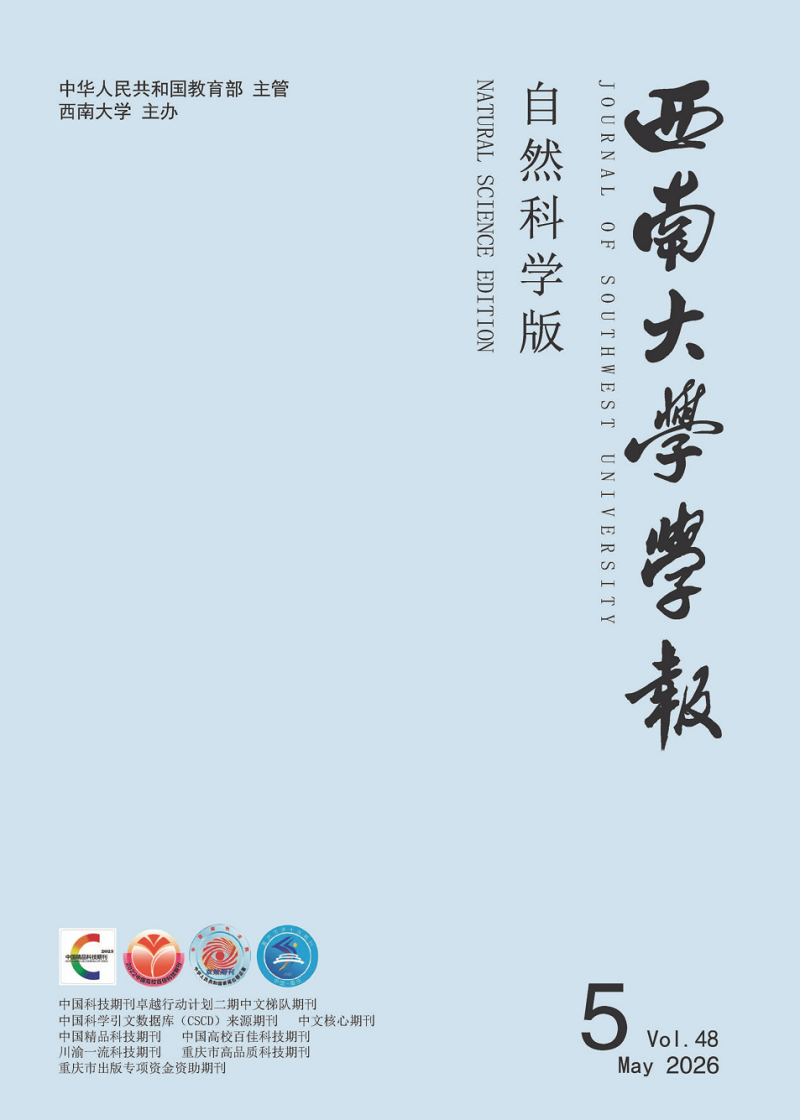
根据磁铁同性相斥的原理设计电磁式振动俘能器,其工作原理及磁场变化如图 1所示。上下2块磁铁固定,其与中间悬浮磁铁相对表面的极性相同,使中间磁铁在磁力作用下处于悬浮状态。在外界振动激励下,悬浮磁铁发生垂直方向的往复运动,导致外部线圈中的磁通量发生变化,从而产生感应电动势。根据麦克斯韦电磁耦合方程[23],有:
其中:μ0为真空磁导率(H/m);μr为介质的相对磁导率;B为磁感应强度(T);Br为悬浮磁铁表面磁感应强度(T);v为导电体的速度(m/s);Je为电流密度(A/m2);σ为电导率(S/m);E为感应电动势(V)。
式(1)和式(2)可用于计算电磁式振动俘能器产生的感应电动势E,则俘能器对负载的输出功率为:
式中:Rl为负载电阻(Ω);Ri为线圈内阻(Ω),公式为:
式中:σi为线圈导线体积电导率(S/m);ai为线圈导线横截面积(m2);S为线圈截面积(m2);N为线圈匝数;L为线圈长度(m)。
-
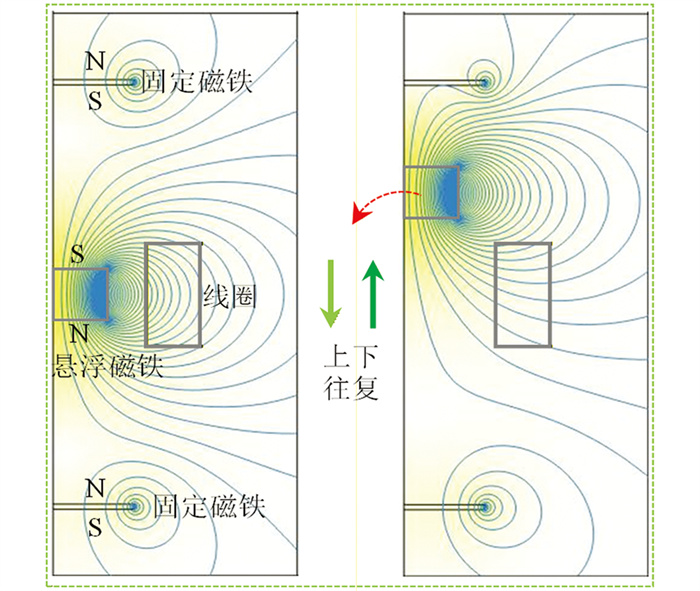
电磁式振动俘能器的具体结构如图 2所示。该俘能器主要由上下两端固定的磁铁和中间悬浮的磁铁组成,上下磁铁极性相反,通过磁斥力实现悬浮。上下磁铁固定在高强度聚氯乙烯圆筒内,圆筒外部绕制漆包线圈,悬浮磁铁的上下表面嵌入聚乳酸球形凹槽,凹槽内置铜珠以减少摩擦。电磁式振动俘能器的结构参数如表 1所示。
1.1. 设计理论
1.2. 电磁式振动俘能器及其参数
-
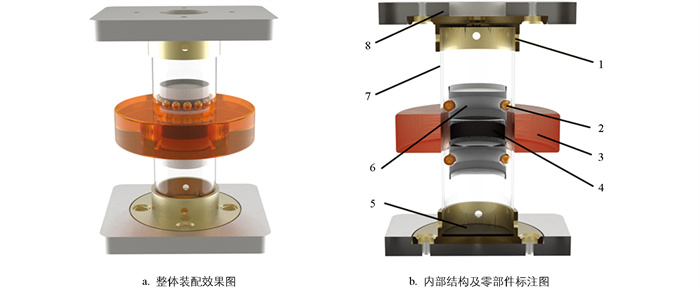
电磁式振动俘能器的结构模型如图 3所示,为便于建立系统的数学模型,引入局部坐标y系和全局坐标z系,以描述俘能器的运动特性。
-
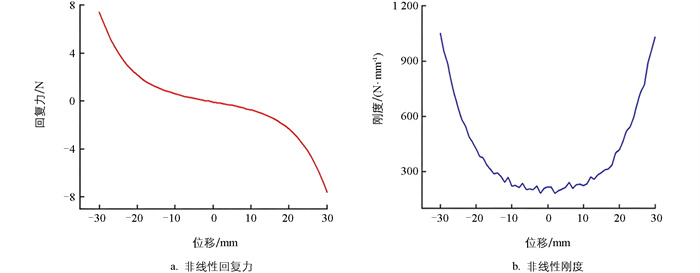
磁悬浮系统的回复力是表征电磁式振动俘能器非线性刚度的关键参数,通过建立回复力计算模型,可以预测悬浮磁铁在小位移范围内的运动特性,进而确定系统的共振频率。研究表明,共振频率可通过调节2个固定磁铁之间的间距进行优化[24]。基于俘能器的结构参数,利用COMSOL软件对系统的非线性回复力和刚度进行仿真计算,计算结果如图 4所示。
总回复力可由作用在顶部和底部磁铁上的回复力矢量和得出,即:
式中:Fb(y)为底部磁铁对悬浮磁铁的回复力(N);Ft(y)为顶部磁铁对悬浮磁铁的回复力(N);y为悬浮磁铁的位移(mm)。
根据Mann等[25]的研究,回复力采用幂级数进行描述,即:
其中:ρ为位移与回复力关系曲线的拟合系数,可通过最小二乘法拟合得到;h0为悬浮磁铁中心线至固定磁铁端面的距离(mm)。
将式(6)和式(7)代入式(5)并完成幂级数展开化简后,总回复力可整理为线性项叠加立方非线性项的形式:
式中:k为线性刚度,k=2ρ1+4h0ρ2+6h02ρ3;k3为非线性刚度,k3=2ρ3。
根据图 4拟合得到ρ1=-39.227 N/mm,ρ2=0.497 16 N/mm2,ρ3=-1.165 5×10-4 N/mm3,代入结构参数h0=41 mm,计算可得:k=1.904 7 N/mm,k3=-2.331×10-4 N/mm3。因此,所求得的回复力与位移的函数关系式为:
-
由图 3可知,z可表示为外界激励直接作用于电磁式振动俘能器上的位移,y可表示为该系统在外界激励作用下悬浮磁铁的位移响应,回复力与悬浮磁铁和外壳之间的相对速度成正比。根据基尔霍夫定律[26],可得电路方程式(10),其等效电路如图 5所示。
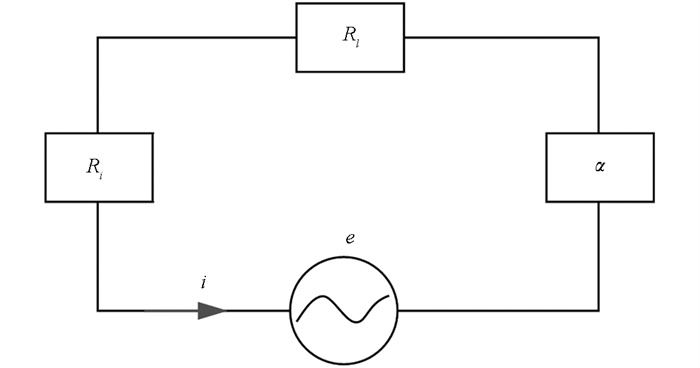
式中:i为电流(A);Ri为线圈电阻(Ω);Rl为负载电阻(Ω);α为机电耦合系数;
$\dot{y} $ 为悬浮磁铁的速度(m/s);$\dot{z} $ 为电磁式振动俘能器的整体速度(m/s)。由图 3可知,z为底座位移,即电磁式振动俘能器的激励,A为激励幅值,ω为激励角频率,则该俘能器在竖直方向上的机械系统合力方程为:
式中:m为2个聚乳酸球形凹槽圆柱和悬浮磁铁的总质量(kg);cm为机械阻尼系数,用于估计黏性阻尼和摩擦引起的能量损失;
$ \ddot{y}$ 为悬浮磁铁的加速度(m/s2);$\dot{y} $ 为悬浮磁铁的速度(m/s);$\dot{z} $ 为俘能器的整体速度(m/s);k为线性刚度(N/mm);k3为非线性刚度(N/mm3);α为机电耦合系数;i为电流(A)。悬浮磁铁上下振动使线圈切割磁感线并产生电动势,线圈内阻做功,自感随之增加。引入修正系数ce,即:
式中:Ri为线圈电阻(Ω);Rl为负载电阻(Ω);α为机电耦合系数。
联立式(10)-式(12)可得修正后的俘能器方程:
式中:c=cm+ce,用以描述系统的机械阻尼与电阻阻尼。
2.1. 电磁式振动俘能器结构模型
2.2. 磁悬浮系统回复力计算
2.3. 电磁式振动俘能器机电模型
-
自走式玉米收获机在运行过程中,履带与路面或田间土壤接触产生的振动激励属于随机振动。该振动与机器自身运行产生的振动相互耦合后,仍表现为随机振动。因此,对于电磁式振动俘能器而言,其所受的振动实际上是由一系列不同振幅、持续时间及行驶速度等多因素叠加形成的多点复合随机振动[27],具体的表达式为:
式中:F(t)为多点复合随机振动载荷(N);P为单个脉冲激励幅值(N);Nv为复合振动中随机激励的总个数;δ为狄拉克δ函数,用于描述脉冲激励的瞬时作用特性;x为位置(mm);xi为作用位置(mm);εi为激励存在的指示函数,当有载荷时εi=1,无载荷时εi=0;t为时间(s);ti为第i个激励的作用时刻(s)。
电磁式振动俘能器的内部运动若表现为单一的上下振动,可采用单自由度非线性系统中的Fokker-Planck-Kolmogorov(FPK)方程进行分析[28]。该方法能够有效描述系统在随机振动激励下的动态响应,为电磁式振动俘能器的性能优化提供理论依据。
设电磁式振动俘能器响应过程是马尔可夫过程,则响应的转移概率密度函数p=(x,t,x0,t0)满足扩散方程[29]:
式中:
$L=-\frac{\partial}{\partial x}[\boldsymbol{a}(x, t)]+\frac{1}{2} \frac{\partial^2}{\partial x^2}[\boldsymbol{b}(x, t)] ; \boldsymbol{a}(x, t) $ 为漂移系数,描述系统状态的确定性平均漂移率;b(x,t)为扩散系数,描述系统状态的随机扩散率。式(15)为正向FPK方程,描述系统从初始时刻、初始状态x0出发,向未来时刻t演化的概率动态规律,用于预测俘能器在随机激励下的响应概率分布,对应的反向FPK方程[30]为:
式中:
$L^*=-\frac{\partial}{\partial x_0}\left[\boldsymbol{a}\left(x_0, t_0\right)\right]-\frac{1}{2} \frac{\partial^2}{\partial x_0^2}\left[\boldsymbol{b}\left(x_0, t_0\right)\right] ; \boldsymbol{a}\left(x_0, t_0\right), \boldsymbol{b}\left(x_0, t_0\right) $ 分别为初始状态下的漂移系数与扩散系数。反向FPK方程以当前时刻t、当前状态x为基准,回溯初始时刻t0的概率演化特性,可用于俘能器的可靠性评估与参数反演分析。式(16)需满足的初始条件为:
若概率密度函数是稳态的,则式(16)为:
通过式(18)可求解俘能器响应的稳态概率密度,为性能优化提供理论依据。
若概率密度函数为非稳态,采用随机平均法对概率分布进行求解[31],并考虑悬浮磁铁的非线性运动方程为:
式中:X为悬浮磁铁相对于平衡位置的位移;
$\ddot{X} $ 和$\dot{X} $ 分别为悬浮磁铁的加速度与速度;f($\dot{X} $ )为非线性函数;ε为非线性强弱程度的正小参数;ω0为系统固有频率;F(t)为多点复合随机振动载荷。引入代换变量X=Acos ψ,ψ(t)=ω0+φ(t),代入式(19)得:
在式(20)和式(21)的平均方程中消除快速振荡项,其平均方程为:
其中:ξ1(t)和ξ2(t)分别为互相独立的单位白噪声;s(ω0)为F(t)的功率谱密度函数。
式(24)和式(25)为一维马尔可夫过程,即:
则平稳概率密度函数的一维FPK方程解析式为[32]:
-
试验在西南大学丘陵山区智能农机装备重庆市重点实验室自制的单行自走式玉米收获机上进行。该收获机由去穗机构、秸秆粉碎机构、行走机构、动力传动系统和控制系统组成,适用于丘陵山区的玉米收获及秸秆粉碎作业,但其可靠性是影响推广的关键因素。因此,监测其运行状态十分必要。试验布置如图 6所示:电磁式振动俘能器固定在玉米收获机前端、靠近动力传动系统的机架处,用于捕获振动能量;同时,无线自供电加速度传感器安装在相近位置,以进行对比验证;此外,示波器用于测试俘能器在耦合激励下的输出电压,分析其运行状态。
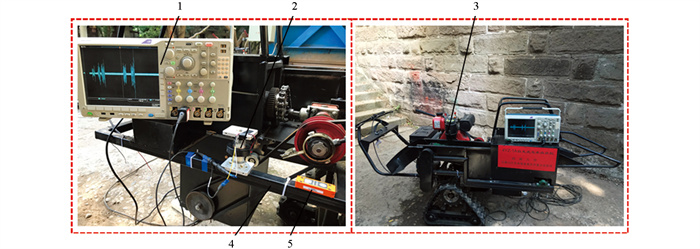
根据自走式玉米收获机的常用工作条件,其运行状态可分为4种工况:①仅行驶工况;②正常行驶并开启输送带;③正常行驶、开启输送带并启动柴油机;④正常行驶、开启输送带、启动柴油机并启动对辊蛟龙。以下分别简称为工况1、工况2、工况3和工况4。
在自走式玉米收获机的运行工况下,振动激励作用使电磁式振动俘能器的线圈切割悬浮磁铁的磁力线,从而产生电压响应。通过该电压响应,可以获取收获机在时域和频域的运行状态特征参数。同时,加速度传感器同步采集收获机同一位置的振动加速度曲线,根据测得的加速度值,也可获得收获机运行状态的时域和频域特征参数。通过对比不同工况下电磁式振动俘能器的电压输出响应与加速度传感器的加速度时域和频域特征参数的一致性,验证电磁式振动俘能器能否有效监测玉米收获机的运行状态。
-
自走式玉米收获机在正常行驶过程中(工况1),加速度传感器测得的加速度数据与电磁式振动俘能器输出的电压信号如图 7所示。
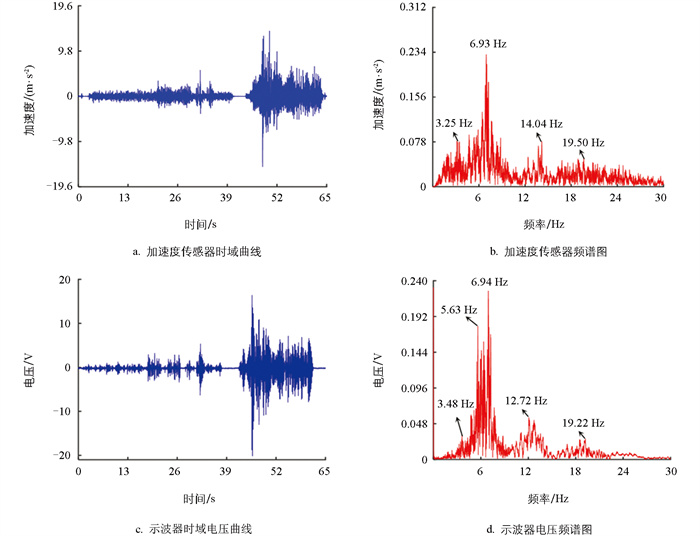
图 7a为加速度传感器时域曲线,最大加速度出现在48.2 s,数值为15.29 m/s2,且在43.8~64.1 s加速度呈较大幅度波动。图 7b为加速度传感器时域曲线经傅里叶变换得到的加速度频谱图,图中显示有4个峰值点,分别对应3.25、6.93、14.04、19.50 Hz,其中最大加速度峰值位于6.93 Hz,数值为0.24 m/s2。图 7c为示波器采集的电磁式振动俘能器时域电压信号曲线,最大电压负向峰值出现在45.7 s,数值为-20.17 V,且在42.0~61.0 s电压信号波动较大。图 7d为示波器采集的电磁式振动俘能器时域电压曲线经傅里叶变换得到的电压频谱图,最大电压峰值出现在6.94 Hz,数值为0.23 V,其余4个峰值点分别对应3.48、5.63、12.72、19.22 Hz。传感器频域加速度最大峰值点(6.93 Hz)与俘能器频域电压最大峰值点(6.94 Hz)的频率非常接近,其余峰值点的频率也较为接近。
在工况1下,加速度传感器测试的加速度与电磁式振动俘能器输出的电压时域信号变化趋势相同,两者波形较为吻合;在频域下,两者的多个峰值频率也吻合良好。
-
自走式玉米收获机在正常行驶并开启输送带过程中(工况2),加速度传感器测得的加速度数据与电磁式振动俘能器输出的电压信号如图 8所示。
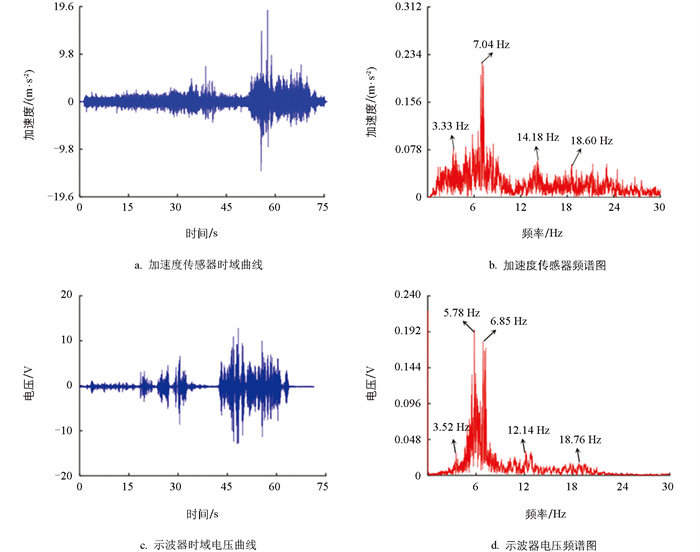
图 8a为加速度传感器时域曲线,最大加速度出现在57.6 s,数值为18.91 m/s2;在41.7~52.1 s加速度保持平稳且波动幅度较小,在52.1~70.0 s加速度波动较大。图 8b为加速度传感器频谱图,图中显示4个峰值点,分别对应3.33、7.04、14.18、18.60 Hz,最大加速度峰值出现在7.04 Hz,数值为0.23 m/s2。图 8c为电磁式振动俘能器时域电压信号曲线,最大电压峰值出现在47.9 s,数值为12.94 V;在33.0~42.3 s电压信号保持平稳且波动幅度较小,在42.3~64.0 s电压信号波动较大。图 8d为电磁式振动俘能器电压频谱图,最大电压峰值出现在5.78 Hz,数值为0.20 V,其余4个峰值点分别对应3.52、6.85、12.14、18.76 Hz。传感器频域加速度最大峰值点(7.04 Hz)与俘能器频域电压2个峰值点(5.78、6.85 Hz)的频率非常接近,其余峰值点的频率也较为接近。
在工况2下,加速度传感器和电磁式振动俘能器在时域和频域的峰值点及波动范围与工况1试验中的峰值点和波动范围较为相似,其主要原因是输送带与俘能器和传感器的布置位置相距较远,且输送带的传动较为平稳。
-
自走式玉米收获机在正常行驶、开启输送带并启动柴油机过程中(工况3),加速度传感器测得的加速度数据与电磁式振动俘能器输出的电压信号如图 9所示。
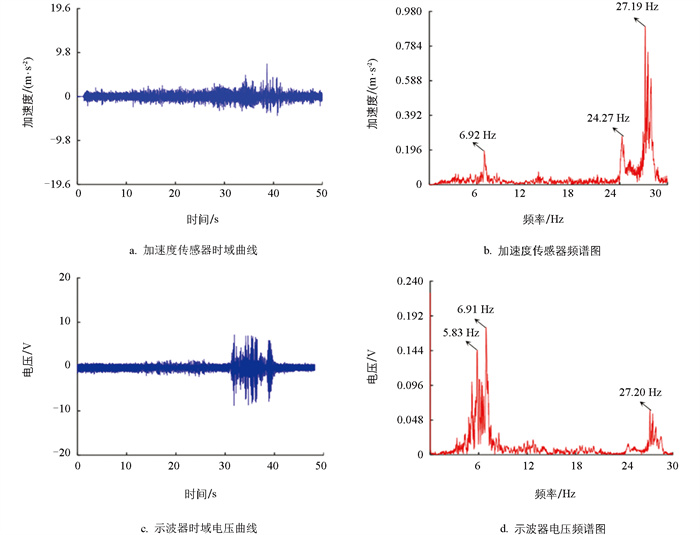
图 9a为加速度传感器时域曲线,整体波形较为平稳,最大加速度出现在38.7 s,数值为7.35 m/s2。图 9b为加速度传感器频谱图,图中显示3个峰值点,分别对应6.92、24.27、27.19 Hz,其中最大加速度峰值位于27.19 Hz,数值为0.89 m/s2。图 9c为电磁式振动俘能器时域电压信号曲线,最大电压峰值出现在31.9 s,数值为8.7 V,在30.6~40.1 s电压呈较大且平稳的波动。图 9d为电磁式振动俘能器电压频谱图,最大电压峰值出现在6.91 Hz,数值为0.18 V,其余2个峰值点分别对应5.83、27.20 Hz。传感器频域加速度最大峰值点(27.19 Hz)与俘能器第3个电压峰值点(27.20 Hz)的频率非常接近,传感器加速度第1个峰值点(6.92 Hz)与俘能器前2个电压峰值点(5.83、6.91 Hz)的频率也较为接近。
在工况3下,加速度传感器测得的加速度与电磁式振动俘能器的电压响应时域信号均处于平稳范围内,两者波形较为吻合;在频域方面,两者的多个峰值频率也表现出良好的一致性。
-
自走式玉米收获机在正常行驶、开启输送带、启动柴油机及启动对辊蛟龙过程中(工况4),加速度传感器测得的加速度数据与电磁式振动俘能器输出的电压信号如图 10所示。
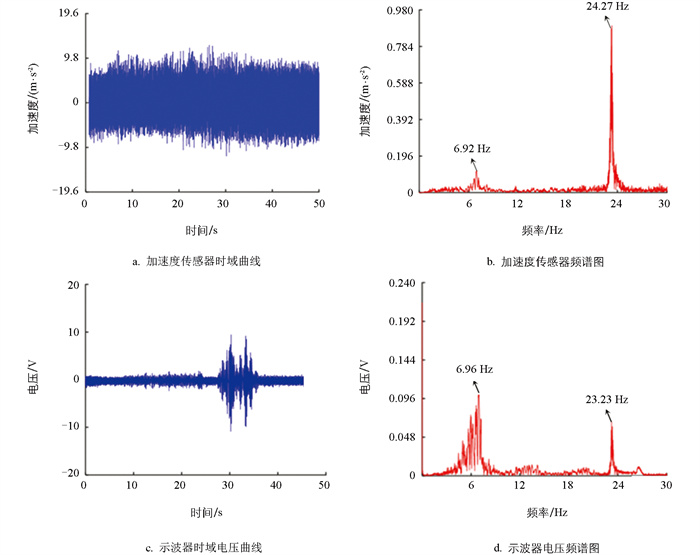
图 10a为加速度传感器时域曲线,启动对辊蛟龙后振动加速度明显增大,且整体保持平稳。图 10b为加速度传感器频谱图,可见2个峰值点分别对应6.92、24.27 Hz,其中最大加速度峰值为0.90 m/s2,位于24.27 Hz。图 10c为电磁式振动俘能器时域电压信号曲线,最大电压负向峰值出现在30.2 s,数值为-10.88 V,在27.6~34.7 s电压波动较大,但整体仍较为平稳。图 10d为电磁式振动俘能器电压频谱图,最大电压峰值为0.11 V,出现在6.96 Hz,第2个峰值对应23.23 Hz。传感器频域加速度的2个峰值点与电磁式振动俘能器频域电压的2个峰值点在频率上均高度接近。
在工况4下,加速度传感器测得的加速度与电磁式振动俘能器电压响应时域信号变化趋势相同,两者波形较为吻合;在频域方面,两者的多个峰值频率也吻合良好。
-
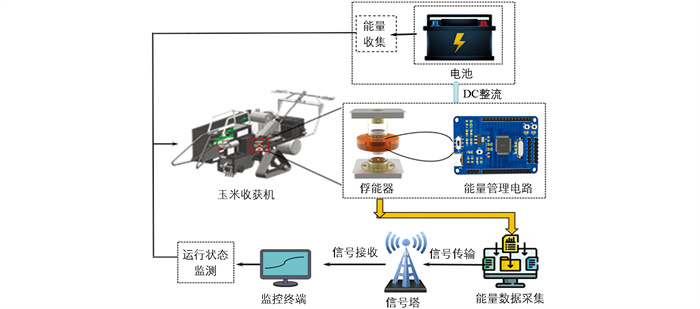
本文进一步提出了一种基于振动能量俘获的自供能玉米收获机运行状态监测系统,如图 11所示。该系统由监测对象、能量采集系统、能量管理电路和可视化监控终端4部分组成。其中,能量采集系统作为核心数据感知单元,通过采集电压信号来监测机器的运行状态。采集到的数据通过无线传输模块发送至监控终端,经过分析和处理后,在终端面板上实现运行状态的实时在线监测。由于振动的间歇性和不稳定性,系统收集的电能同样具有间歇性和不稳定性,且俘能器的能量转换效率较低(低于3%)[24]。因此,为了使系统采集的振动能量能够为传感器供电,必须通过能量管理电路将其转换为直流电能,并存储于蓄能电池或大容量储能电容中,为无线数据传输模块提供持续的电力支持。系统的数据传输和监测通常并非连续进行,而是按照特定频率(特定时间间隔)发送数据;在无数据传输时,系统处于休眠状态,几乎不消耗存储的电能。因此,利用俘能器进行振动能量俘获能够满足收获机运行状态监测的需求。这种自供能的机器运行状态监测系统不仅提高了能源利用效率,还为现代智慧绿色农业的发展提供了可行的技术参考。
3.1. 随机振动理论
3.2. 试验布置
3.3. 试验结果
3.3.1. 工况1
3.3.2. 工况2
3.3.3. 工况3
3.3.4. 工况4
3.4. 应用场景
-
为满足绿色农业发展的需求并实现对自走式农业机械运行状态的实时监测,本文提出了一种基于振动能量俘获的运行状态监测方法。以自走式玉米收获机为研究对象,设计了一种电磁式振动俘能器,并测试了该机器在4种不同运行工况下的输出电压响应数据。同时,将采集到的数据与传感器测试的加速度时域和频域振动特征参数进行了对比分析,得出以下结论:
1) 通过对自走式玉米收获机在不同运行工况下的测试分析,发现电磁式振动俘能器的电压输出响应与加速度传感器测得的加速度响应在时域曲线上表现出较好的一致性。此外,经过频谱变换分析,两者在频域的振动特征频率也表现出较好的一致性。该结果充分验证了利用电磁式振动俘能器输出电压响应来监测自走式收获机运行状态的原理具有科学性和可行性。
2) 提出了一种基于振动能量俘获的自供能状态监测系统,该系统通过能量管理电路将俘获的振动能量整流为直流电能,并存储于蓄能电池中,从而为自走式玉米收获机运行状态的无线传输模块提供自供电支持,实现远程实时监测。该研究为自走式农业机械运行状态的实时监测提供了一种创新思路,具有重要的理论和实际应用价值。
 DownLoad:
DownLoad: