


 下载:
下载:

-
苹果(Maluspumila Mill.)是蔷薇科经济价值较高的植物[1],也是中国第一大果品[2],其种植区域主要分布在渤海湾区和黄土高原地区[3],其中,黄土高原区域因其气候温凉、海拔高(600~1 300 m)、昼夜温差大(11.8~16.6 ℃)、光照充足、土层深厚、干燥少雨(年降雨500~800 mm)、病虫害发生轻和环境污染小等特征已成为我国苹果发展最具潜力的区域,也是世界公认的最大优质苹果产区[4-5].
为了能准确估算苹果园的经济收益,对苹果产量进行快速精确预测是必要的手段,而准确计数苹果结果对准确预测苹果产量具有重要借鉴意义.对于采摘后的果实,由于所处环境条件可人为改变,计数工作相对简单、易操作.但对自然生长状态下的苹果,由于果园作业场景复杂,自然光照随时间变化较大,从早晨或黄昏的弱大气光到中午的强太阳光,光照强度和颜色都存在一定的差异,且因果树树叶遮挡,多果邻接会产生各种不同形式的阴影使准确识别苹果果实具有较大的挑战性[6].图像分割法可以实现对图像中目标物的提取[7],目前利用图像分割法已开展的相关研究工作主要集中在服务于提高苹果自动化采摘机器人的识别率[8-12]和如何在苹果分级系统中对红色果品进行准确识别[8, 13],研究重点则以分离及准确定位粘连苹果为主要内容[14-19],研究方法主要以RGB(红、绿、蓝)颜色模型为基础并结合多种其它颜色模型展开.例如,司永胜等选择R-G颜色差为颜色特征,提出了一种基于K-均值聚类的苹果图像识别算法对颜色和背景相近的绿色苹果进行识别[20];张传栋等将RGB颜色空间转换至HIS(色调、强度、饱和度)颜色空间,利用色调信息,采用基于ExR(超红)的算法并应用基于区域的分割方法实现了对目标的有效分割,并通过估计轮廓曲线段的圆心及其半径参数,最终实现了对果实的定位[21];JI等将R-G颜色差作为识别红色苹果的方法改进了苹果采摘机器人的工作效率[22];张润浩等将苹果影像由RGB颜色空间转换至YUV(U和V表示颜色信息,Y表示强度)颜色空间,并利用色差分量V建立果实与背景分割的高斯分布拟合模型,根据拟合结果自动获取分割阈值,实现了自然场景下苹果的准确分割[23];王晓慧和黄兆良等利用Otsu(最大类间方差法)分割R-G和ExR-ExG(超红减超绿)图像,实现了对红色苹果的识别[8, 13].相对以上研究,目前针对计数成熟期苹果树结果数量的相关研究,鲜有文献报道.
因此,本研究通过对比多种图像分割算法对成熟期苹果影像的分割,选取适宜的分割方法,通过训练提高其影像分割精度;并以影像分割为基础,计算分割后影像中单果的平均面积,通过求解影像中苹果的总面积与单果平均面积的比值,确定苹果数目,对求解结果进行准确率计算.
全文HTML
-
图像采样区地处黄土高原中南部陕甘交界的陕西省长武县洪家镇王东村(35°14′N,107°41′ E),海拔1 220 m,属暖温带半干旱湿润性大陆季风气候,年均降水584 mm,年均气温9.1 ℃,无霜期171 d,地下水埋深50~80 m,属黄土高原典型旱作农业区.地貌类型为黄土高原沟壑区,土壤类型为黑垆土.农林作物以苹果、小麦(Triticum aestivum L.)、玉米(Zea mays L.)为主.
-
于2016年10月中旬(苹果收获季),使用华为荣耀7智能手机在太阳光较弱的时间段,将镜头平行于水平地面,并固定拍照距离,以自然曝光的模式,对目标果实进行拍照并采集影像.影像采集后,为方便分割处理,在不影响影像中目标与背景形状及颜色的前提下,影像统一裁剪为960×1891像素大小,以JPG格式导入计算机.
-
将RGB颜色空间转换为HIS颜色空间,并获取H及S颜色分量(RGB转换HIS公式参见参考文献[21]).选取适宜的分类数,使用K均值聚类算法分别对H及S颜色分量进行聚类分析,获取分割图像.
提取RGB颜色空间下的R,G,B颜色分量,分别对R颜色分量、1.4×R-G、R-G/G-B、2×R-G-B以及R-G运算结果进行Otsu分割[24],并对分割结果进行比较.
在比较多种分割算法的基础之上,提出1.1×R-G色差运算与Otsu分割法相结合的影像分割方法.
对二值化处理后的影像使用MatLab(版本R2015b)软件中的“bwareaopen”命令进行去噪处理,去除噪声后的影像通过“bwarea”命令计算影像中苹果区域的总面积(像素数),并计算单果平均面积(像素数),以影像中苹果区域的总面积与单果平均面积的比值确定苹果结果数目.对计数结果进行准确率计算.
-
采用EXCEL2013进行数据处理及运算.
1.1. 图像采集区简介
1.2. 图像采集
1.3. 图像分析方法
1.4. 数据处理
-
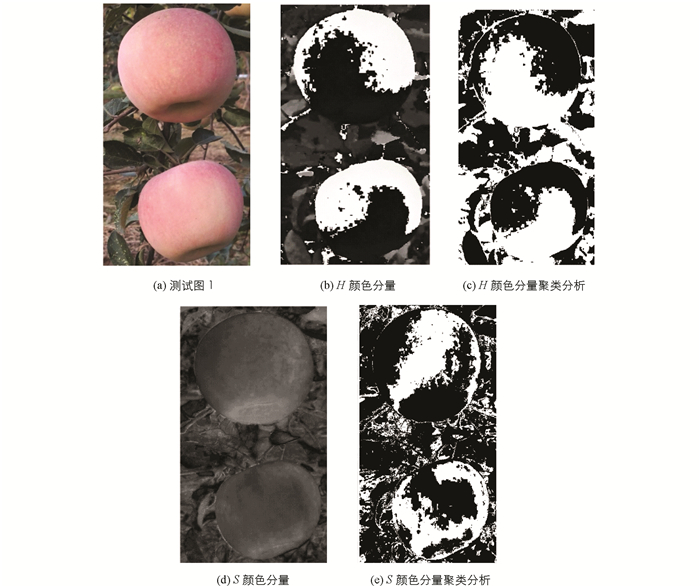
选择合适的颜色空间是实现准确分割目标的基础,HIS颜色模型可以反映人的视觉系统感知彩色的方式,以色调、饱和度和强度3种基本特征量来表示给定颜色[21].图像聚类可以将图像划分为一系列相互不重叠的独特性质区域[25].因此,在本试验中,首先将RGB颜色空间转换为HIS颜色空间,通过提取H(色调)和S(饱和度)颜色分量,并对H和S颜色分量分别进行聚类分析,以分割目标影像,影像分割结果见图 1.
图 1(a)为原始影像样本,图 1(b)为H颜色分量图,在图 1(b)中苹果红色较深的区域呈现为白色,而浅红色的区域则呈现为黑色,苹果果面颜色均一性差.对H颜色分量进行K均值聚类分析,聚类分析后的影像分割图见图 1(c),在图 1(c)中,K均值聚类分析准确呈现了H颜色分量在苹果区域的差异,但图像噪声大. 图 1(d)为S颜色分量图,在S颜色分量图中,苹果果面S颜色分量值一致性较差,苹果周围的部分树叶呈现出与苹果果面相近的颜色,苹果轮廓清晰,其聚类分析结果虽然能准确呈现S颜色分量图中的差异,但对苹果区域的识别结果不甚理想(图 1(e)).
-
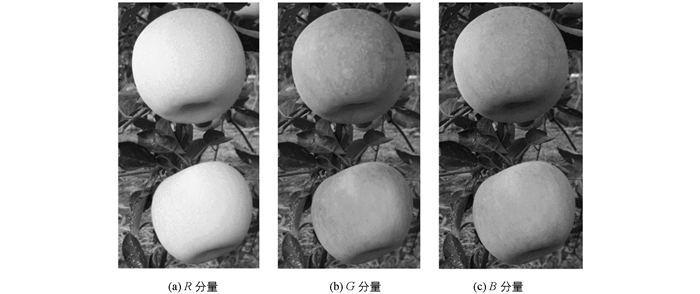
影像分割结果表明基于H和S颜色分量的K均值聚类分析不能将成熟期的苹果从背景影像中成功进行分离.考虑到自然界中的任意颜色都可以由RGB颜色空间中的R,G,B三基色按不同的比例混合而成[7],且在苹果成熟期,苹果果面颜色基本呈现红色,因此提取R颜色分量(图 2)后,使其分别与G和B颜色分量(图 2)组合进行色差运算,并对运算结果进行Otsu分割[24].
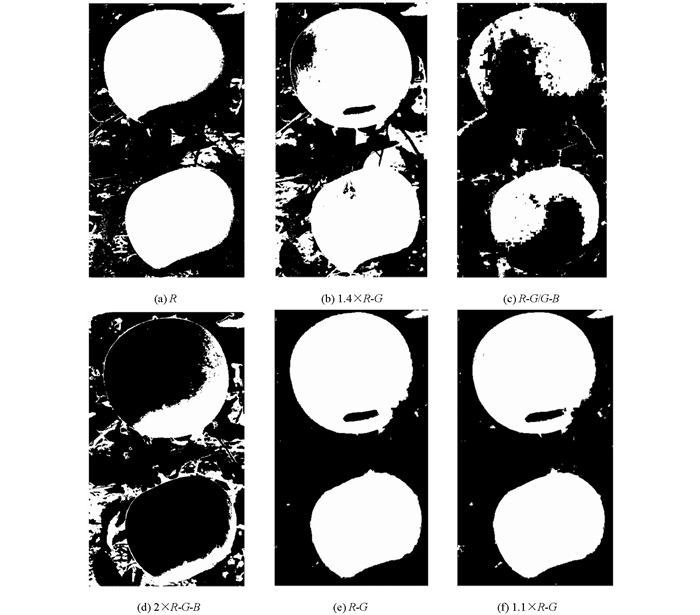
R颜色分量以及其与G和B颜色分量间色差运算的Otsu分割结果见图 3. 图 3(a)为R颜色分量Otsu分割结果,图像中苹果下半部的阴影部分不能被准确识别,阈值分割后的图像噪声比较大. 图 3(b)为1.4×R-G阈值分割的结果,该算法能准确呈现苹果的外形轮廓,但图像噪声也比较大,苹果果面有部分区域也不能被准确识别. 图 3(c)为R-G/G-B Otsu分割后的影像分割结果,与R颜色分量以及1.4×R-G色差Otsu分割结果相比较,其噪声较小,但苹果的部分区域与背景融为一体很难识别,该分割方法不能准确呈现苹果的外部轮廓. 图 3(d)为2倍R颜色分量后与G和B颜色分量色差运算经Otsu分割后的影像图,该算法苹果轮廓清晰可见,但其对苹果果面阴影区域分割效果差,较大的噪声也使图像的后续处理难度增大. 图 3(e)为R-G色差Otsu分割的影像图,观察分割后的影像图,在苹果区域除边缘阴影处有轻微漏分割现象外,图像噪声小,苹果整体轮廓清晰,背景呈现为单一的黑色区域,分割结果准确性高. 图 3(f)为经过多次尝试,修改R-G色差公式中R颜色分量的系数为1.1,并对公式计算结果进行Otsu分割后的影像效果图,该图显示了与图 3(e)较一致的分割效果.
为了获取最佳影像分割方法,选取苹果果面红色较浅的苹果影像,进一步比较R-G与1.1×R-G两种算法经Otsu分割后的影像分割效果. 图 4(a)为所选样本,图 4(b)与图 4(c)为经过不同色差运算后苹果影像Otsu分割效果图,比较图 4(c)与图 4(b),图 4(b)显示了清晰的图像轮廓,经1.1×R-G运算后,苹果果柄形状也被准确识别,且较小的影像噪声更易于后续影像处理.因此,本文选取1.1×R-G色差运算结合Otsu分割法作为成熟期苹果影像的分割方法.
-
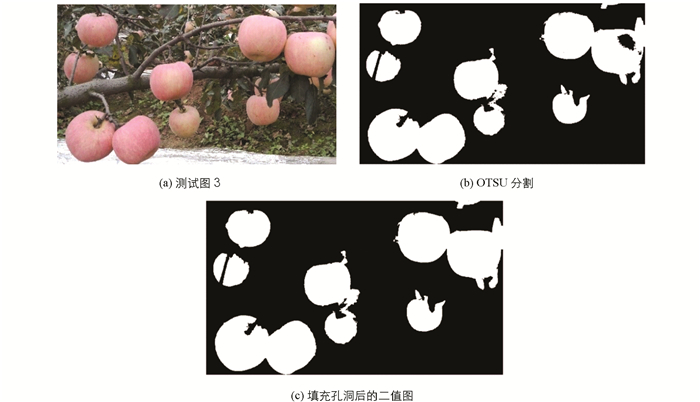
在进行苹果计数运算之前,首先对多幅单果影像进行阈值分割,并计算分割后的单果平均面积.然后对待计数目标影像进行色差运算并进行Otsu阈值分割,对阈值分割后的影像进行去噪及图像孔洞填充处理.图像处理效果图见图 5,图 5(a)为原始影像样本,图 5(b)为Otsu分割后的影像图.在图 5(b)中苹果轮廓清晰,但部分苹果区域由于果面颜色不均一,浅色部分有黑点或黑斑,为了不影响面积运算结果,对阈值化后的二值影像进行去噪并填充孔洞,去噪及填充孔洞后的影像见图 5(c). 图 5(c)显示了纯净的背景及完整的苹果轮廓.在苹果影像分割的基础上,根据影像中苹果区域的总面积与平均单果面积的商确定苹果个数.
-
为了验证计数结果的准确性,对20幅图像,共计273个苹果与本文算法所获取的苹果数目进行误差率及准确率计算[26].
式中:E代表误差率,s1为实际苹果数,s2为本文方法计算所得苹果数目,A为准确率,计算结果见表 1. 表 1表明根据本文算法计数苹果结果数,其平均误差率为17.82%,平均准确率为82.18%.
2.1. 基于H和S颜色分量的K均值聚类分析
2.2. 基于R,G,B颜色分量间色差运算的OTSU影像分割
2.3. 苹果数目计算
2.4. 分析计数结果
-
本试验以计数自然生长状态下的苹果果实为研究目标,通过对比多种影像分割算法,提出1.1×R-G色差运算的Otsu影像分割法作为本研究的影像分割法,该方法不仅对苹果果面红色较均匀的果实有较好的分割效果,而且对于红白相间的果实也有较好的分割效果,适宜成熟期以苹果为分割目标的影像分割,但不适用于苹果采摘机器人对单果的精确定位与识别.在苹果之间粘连、重叠程度较小且果实被遮挡的现象较少发生的条件下,直接以计算影像中苹果总面积与单果平均面积之商确定苹果数目的方法简单易操作,方法可为果园抽样调查果实生长状况提供技术借鉴.在苹果计数算法中,单果平均面积的确定影响计数的准确率,因此该方法需要采集较多的单果样本以确定单果面积.
-
在影像分割的基础上,以计数自然生长状态下的苹果数目为主要研究目标,通过对多种影像分割方法的比较,结果表明1.1×R-G色差运算结合Otsu阈值分割的方法对成熟期以苹果为分割目标的影像有较好的分割效果.对二值化后的苹果影像进行去噪处理,计算去噪处理后影像苹果区域的总面积,以苹果总面积与单果平均面积的商确定苹果影像中的苹果数目,该方法计算简单,计数准确率较高.