


 下载:
下载:
-
随着LTE-5G通信技术的不断发展,特别是LTE-5G通信芯片在传感领域的广泛推广,无线传感网(WSN,Wireless Sensor Network)使用方式也从传统的固定式部署日益向随机化、移动化、高频化模式演进,成为工业4.0的推动性因素之一[1].如何在LTE-5G通信技术背景下充分发挥传统无限传感网的优势,适应当前LTE-5G技术带来的移动-漂移特性的挑战,满足传感技术与LTE-5G通信技术的深度融合,特别是实现移动传感网络在超高速情况下的信号源定位,成为当前应用通信领域的热点之一[2].
近年来,学者们提出了一系列的解决方案,如Bang等[3]提出了一种超视距矢量定位机制,该机制主要采用距离阀值修正裁决方式,当传感节点因漂移进入下一跳节点的覆盖范围时,采取能量数据最优递归的方式选取最佳覆盖节点,从而实现了定位锚节点的准确识别. Jover等[4]提出了一种节点集群聚类识别定位机制的WSN网络信号源定位算法,该机制通过中心聚类密集虚拟扫描的方式,对进入传输区域内的节点进行频率采样,将频率近似的节点进行信道防碰撞处理,降低了因信道碰撞因素而导致的信号源定位失败的概率,有效改善了移动传感网的整体数据传输能力. Levasseur等[5]提出了一种基于层次聚类重要性递归机制的WSN网络信号源定位算法,该机制利用LTE-5G信号的自适应漂移特性,采取多普勒机制获取信号频率的漂移从而实现定位,且定位的精度较高. Polak等[6]提出了一种基于区域-边缘节点混合交错定位机制的WSN网络信号源定位算法,该机制采取层次矩阵异构映射方式,将传统“扁平型”的拓扑结构通过矩阵空间映射方式进行了层次构造,并将数据传输问题划归为层次轨迹搜寻问题,并采取欧里几何空间最优解对问题进行解决,实现了交叉区域内数据的有效传输,且数据吞吐性能较好.然而,上述机制仅能适应移动速度较低的无线传感网络,针对传感节点处于高速移动状态时所具有的流动特性难以进行频率纠正,在节点密度较大情况下,易导致定位过程出现精度下降的问题.
为了解决上述问题,本文提出了一种基于旋跳自漂移修正机制的超高速移动WSN网络信号源定位算法,首先考虑到超高速移动WSN同时具有的信号频率漂移高、拓扑位置多变的特性,采取频率漂移修正的方式降低节点移动性对定位过程的影响,并通过三角定位方式实现初步定位;随后考虑到锚节点的移动特性,基于跳数-频率漂移的方式,构建平均拓扑间距漂移因子,并使用该因子筛选出性能最佳的节点用于定位过程;最后,基于锚节点具有的粒子群特征,引入粒子群修正机制并采用Sink节点对锚节点进行初始化,改善LTE-5G频率漂移现象对锚节点基准坐标的影响,提高了基准坐标的获取精度.最后,测试所提算法的信号定位精度.
全文HTML
-
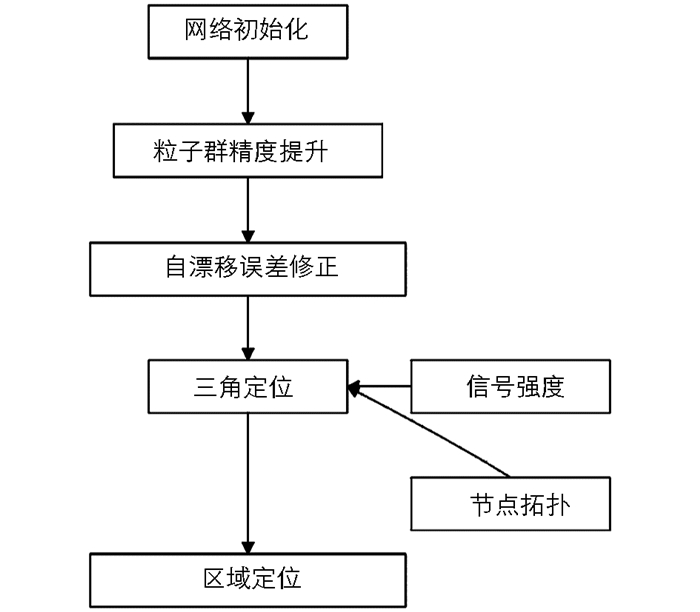
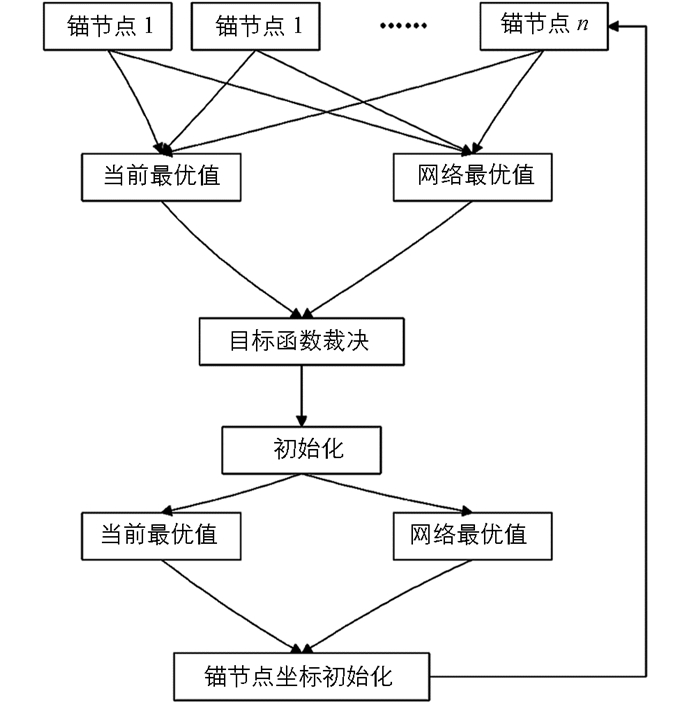
本文所提的基于旋跳自漂移修正机制的超高速移动WSN网络信号源定位算法过程见图 1,其包含3个部分:基于旋跳修正机制信号强度-节点跳数区域定位、自漂移误差修正机制的锚节点初始化、粒子群精度提升机制.通过旋跳修正机制信号强度-节点跳数区域定位过程,显著降低传统的三角定位过程中难以适应LTE-5G信号漂移现象的难题,提高了定位过程的精度和可控性;通过自漂移误差修正机制的锚节点初始化,尽量降低信号漂移现象对锚节点本身坐标的干扰现象,防止因锚节点坐标误差而导致的定位误差出现;通过粒子群精度提升机制,能够对网络中的锚节点进行坐标修正,降低锚节点自身误差而导致的定位误差.
-
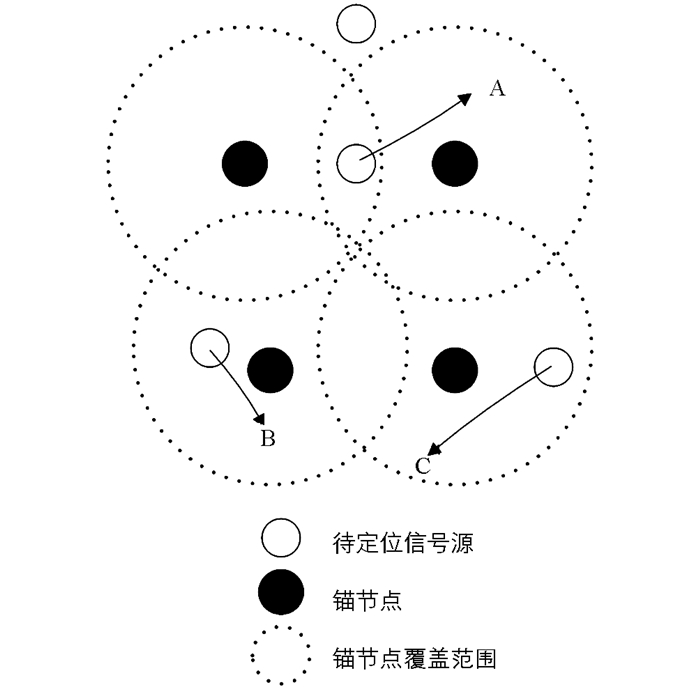
考虑移动传感网中节点处于移动状态,其拓扑结构仅在传输周期内保持相对稳定[7].设图 2中的A,B,C表示第N个传输周期中处于3个相邻区域内的区域节点,三者之间的平均跳数分别为:L(A,B),L(A,C),L(B,C);A,B,C三点间的实际拓扑距离(该距离可以通过多普勒频移方式直接获取[8])分别为M(A,B,n),M(A,C,n),M(B,C,n);由DV-Hop算法[9]可得第N+1个传输周期内待定位信号源H距离A,B,C三点的实际拓扑距离H(A,B,n+1),H(A,C,n+1),H(B,C,n+1)为:
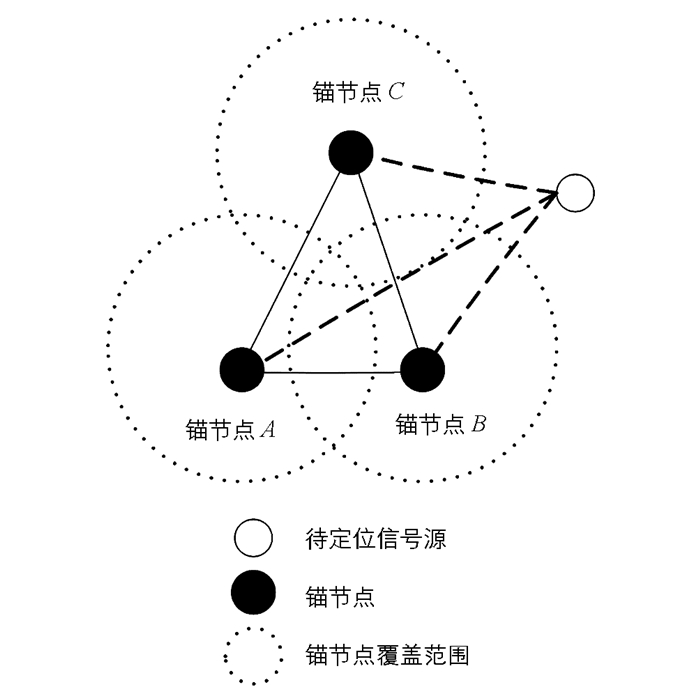
通过模型(1)~(3),可以获取待定位信号源距离已知节点A,B,C之间的拓扑距离,见图 3,A,B,C为传输周期内的区域节点,因此三者的物理位置在数据传输完毕前将保持不变,通过三角定位法[10]即可准确地获取待定位信号源H的详细坐标.然而由于下一个周期中区域节点A,B,C的位置可能发生显著变化,此外LTE-5G具有显著的频率漂移特性,与当前广泛采取的多普勒频移法[8]互相冲突,因此,本文采取频率因子修正方式对模型(1)~(3)进行改进.
考虑到A,B,C为移动WSN网络中的区域节点,见图 3,一旦部署完毕,则其射频频率将不会发生改变;令网络中sink节点的中心频率为ν(sink),任意第N个传输周期中A,B,C三点与sink节点的频率偏移分别为:ν(A,sink,N),ν(B,sink,N),ν(C,sink,N);则在第N+1个传输周期内,A,B,C三点的频率偏ν(A,N+1),ν(B,N+1),ν(C,N+1)的计算函数为
若电磁波传播速度为c,则结合模型(1)~(6)可得N+1个传输周期内待定位信号源H距离A,B,C三点的实际拓扑距离H(A,B,n+1),H(A,C,n+1),H(B,C,n+1)应修正为
按三角定位法[10]即可得到待定位信号源H在任意时刻的物理位置.
-
虽然通过模型(7)~(9)可获取待定位信号源H在任意时刻的物理位置,然而,A,B,C三点作为锚节点,其物理位置处于不断变动之中.模型(7)~(9)通过频率偏移的修正,能够将sink节点与A,B,C三点的相对距离进行定位,即锚节点A,B,C能够通过测量多普勒频率偏移的方式进行定位,然后依据自身坐标对待定位信号源H进行二次定位.由于移动无线传感网节点处于超高速运动状态时,锚节点也处于高速运动状态,因此,通过sink节点进行三角定位时所获取的坐标精度难以进一步提高.鉴于采用三角定位方式的不足,本文在完成旋跳修正机制的信号强度-节点跳数区域定位流程后,进行如下调整:
待定位信号源H将在任意传输周期内对可接收到的N个锚节点均纳入考察范围,即对接收到的锚节点进行精度提升处理,降低锚节点因高速运动而带来的自漂移误差;针对多个锚节点进行拓扑跳数的合理估计,尽量降低待定位信号源H在定位过程中因锚节点位置误差而导致的二次定位误差,从而提高整体的定位精度.
假设待定位信号源H在定位过程中所发现的任意锚节点i的坐标为(xi,yi),则H在定位过程中所发现锚节点间的拓扑间距漂移Li为
模型(10)中,Lij表示任意两处锚节点i和j之间的拓扑跳数,积分路径为锚节点j的运动轨迹.考虑到i和j均可以通过三角定位方式获取坐标,不妨设两者的坐标为(xi,yi)和(xj,yj),则两者间的物理位置相对差R(i,j)为
结合模型(10)~(11)可得i和j之间的物理距离偏移L(i,j)为
相关参数定义同模型(10),(11).
考虑到不同锚节点之间的物理距离偏移因素,若待定位信号源H在定位过程中所接收到的锚节点信号不唯一,则由模型(12)所决定的物理距离偏移会随着待定位信号源H及网络节点的超高速移动状态而不断累积,造成较大的定位误差.令当前经过搜寻获取的锚节点个数为G,则对于任意锚节点i而言,其平均拓扑间距漂移Mi为
上式中相关参数定义同(11),(12).
在定位过程中,可按模型(13)对全部锚节点(共计G个)计算平均拓扑间距漂移,选取拓扑间距漂移最小的3个节点A,B,C进行拓扑定位.考虑到模型(13)获取的平均拓扑间距漂移未进行归一化处理,因此,在模型(13)基础上进行归一化处理,则任意锚节点i的平均拓扑间距漂移指数μi为
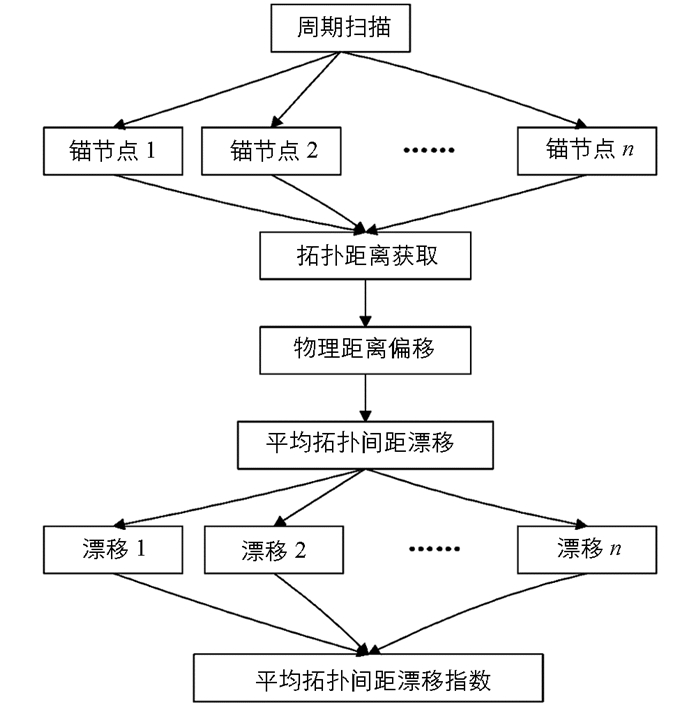
待定位信号源H在定位过程中按模型(14)获取全部的锚节点的平均拓扑间距漂移指数μi,获取流程见图 4,每个传输周期内均选取平均拓扑间距漂移指数最大的3个节点A,B,C进行拓扑定位,从而降低因锚节点自漂移因素而导致的定位误差.
-
由于超高速移动WSN网络中包括锚节点在内的全部节点均处于超高速移动状态,传统方案[11-12]仅对网络定位过程中因超高速移动状态而导致的定位误差有所考虑,很少根据锚节点在超高速移动过程中具有的粒子群特性进行研究[13].
考虑到网络中sink节点具有网络的最高控制权限,因此可以根据锚节点具有的粒子群特性,通过sink节点进行控制:符合定位性能的锚节点予以继续保留,通过精度控制,不断地将锚节点移动至合适的位置,提高锚节点对待定位信号源的适应性能,强化网络的定位效果.
将网络中的锚节点看作是处于混沌状态的粒子,每个粒子均可通过当前最优值popt及网络最优值gopt来不断调整自身坐标;其中当前最优值popt为锚节点的平均拓扑间距漂移,可由模型(13)获取;网络最优值gopt可以由模型(14)获取;粒子群精度提升机制的详细步骤如下:
Step 1:对网络中全部锚节点进行初始化,即sink节点通过搜寻,寻找到当前处于存活状态的锚节点,并记录每一个锚节点的当前最优值popt及网络最优值gopt;
Step 2:初始化过程完成后,记录获取的全部N个锚节点的坐标(xn,yn),设待定位信号源的坐标估计为(x,y),di为待定位信号源i与sink节点间的物理距离,记录完毕后,转Step 3;
Step 3:根据锚节点坐标(xn,yn)及信号源坐标(x,y)的物理估计距离di构建距离方程:
通过第i个锚节点的坐标(xi,yi)及信号源坐标(x,y),构建裁决函数f(i):
其中i表示第i个锚节点,在传输周期T内的目标函数F(i,T)为
Step 4:对比全部的锚节点当前最优值popt,若优于目标函数F(i,T),则保持不变,见图 5;否则将当前目标函数的值赋予popt,其中T表示当前传输周期,T+1表示下一个传输周期.
Step 5:对比全部的锚节点网络最优值gopt,若优于目标函数F(i,T),则保持不变,见图 5;否则将当前目标函数的值赋予gopt,其中T表示当前传输周期,T+1表示下一个传输周期.
Step 6:在数据传输周期T内,根据计算获取的当前最优值popt及网络最优值gopt来不断调整锚节点的坐标,并用于信号源定位,传输周期T完毕后,返回Step 1,继续进行锚节点坐标的修正过程.
-
本文算法通过3个节点同时进行信号接收,而传统的基于单节点信号接受的算法,如超混沌偏移修正定位算法(Hyperchaotic Migration Correction Location algorithm,HMCL算法)[15]、螺旋递归自适应定位算法(Spiral Recursive Adaptive Positioning algorithm,SRAP算法)[16]及逐次跌跳收敛定位算法(Convergence and Convergence algorithm for Fall-Jump,FJ2C算法)[17]均采用周期定位方式进行信号定位,故本文算法的空间复杂度为min{O(K),O(M)},其中K表示算法执行过程中节点的跳数,M表示算法执行过程中节点的迭代周期,而采用周期定位方式的空间复杂度为O(K),显然本文算法在性能最差时的空间复杂度亦可达到O(K),在空间复杂度上与传统算法相比具有一定的优势.从信号接收角度而言,本文算法采用三点定位方式,仅需要一次定位即可实现精准定位,时间复杂度为O(t),而HMCL算法、SRAP算法和FJ2C算法均采用周期定位方式进行时间计算,因而时间复杂度为O(tn),显然要远高于本文算法.
1.1. 基于旋跳修正机制的信号强度节点跳数区域定位
1.2. 基于自漂移误差修正机制的锚节点初始化
1.3. 粒子群精度提升机制
1.4. 算法复杂度分析
-
为了测试所提算法的定位性能,采用NS2平台进行实验,WSN节点信号采用LTE-5G中常用的128QAM调制方式[14],整个仿真过程中信号传输子载波数量不高于128路;对照组采用超混沌偏移修正定位算法(HMCL算法)[15]、螺旋递归自适应定位算法(SRAP算法)[16]和逐次跌跳收敛定位算法(FJ2C算法)[17].考虑到超高速移动无线传感网部署实践中网络环境抖动性较强,本次实验的信道环境采用高斯信道、瑞利信道、莱斯信道,用于模拟普通抖动、一般抖动、超高频抖动3种实际部署环境;采用定位精度、定位错误发生频率、信号上传带宽3个指标进行数据分析,相关实验参数如下所示.
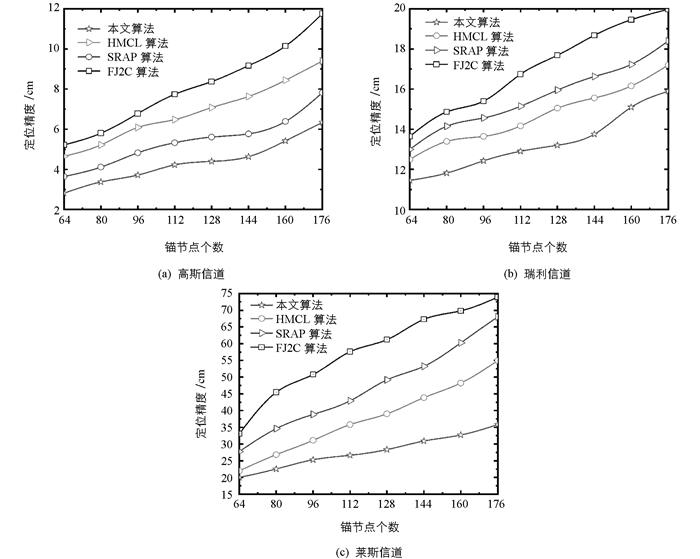
图 6(a)~(c)显示了本文算法在高斯信道、瑞利信道、莱斯信道3种实际部署环境下,与HMCL算法、SRAP算法及FJ2C算法的定位精度仿真对比情况;由图可知,本文算法在3种实际部署环境下均具有显著的优势,定位精度较高,特别是在莱斯信道环境下定位精度远远高于对照组3种算法.这是由于本文算法通过基于旋跳修正机制信号强度-节点跳数区域定位、自漂移误差修正机制的锚节点初始化、粒子群精度提升机制3种方式改善了传统算法中三角定位的同时,针对LTE-5G信号的频率漂移进行了抑制处理,特别是较对照组算法而言,本文算法在通过粒子群精度提升机制,能够在定位过程开始前进行锚节点坐标预修正过程,大大降低了因锚节点坐标误差而导致的定位误差;HMCL算法仅采用传统的三点定位方式,需要预知锚节点的坐标,一旦锚节点坐标误差较大时将难以进行定位;SRAP算法虽然能够进行锚节点坐标修正,然而该算法主要应对锚节点流动性较低时的部署环境,若锚节点和待定位信号源均处于高速运动状态时,很难进行信号位置的捕捉,因此定位精度较差;FJ2C算法虽然考虑了锚节点与信号源之间的相对拓扑变动因素,然而该算法未对信号偏移因素进行考虑,特别是未考虑节点信号传输采用LTE-5G时所带来的物理位置误差,故而定位精度低于本文算法.
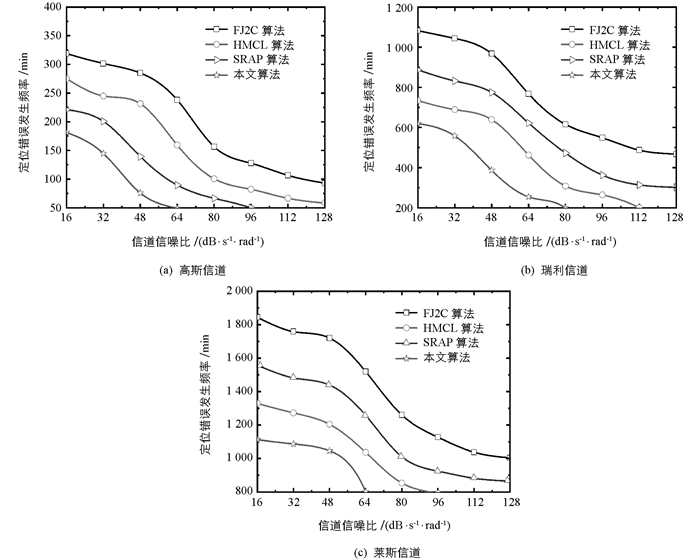
图 7(a)~(c)显示了本文算法在高斯信道、瑞利信道、莱斯信道3种环境下,与HMCL算法、SRAP算法及FJ2C算法的定位错误发生频率对比情况,由图可知,随着传输周期不断上升,本文算法的定位错误发生频率要显著低于对照组算法.这是由于本文算法分别从信号层次和锚节点层次进行了错误控制,能够从信号漂移、锚节点漂移2个方面同时进行误差控制,降低了定位错误发生的频率;而HMCL算法和SRAP算法由于仅能依托网络中存量的锚节点进行定位,而移动无线传感网中锚节点因移动而出现故障的概率要远高于固定传感网,因此,这2种算法的定位性能要低于本文算法,定位错误发生频率较高;SRAP算法虽然能够采取轮询更新机制对网络中的锚节点进行周期更新,然而由于更新过程中未对LTE-5G信号的高频特性进行处理,使得该算法定位过程中因频率漂移过大而导致定位错误的发生几率要高于本文算法,因此在定位错误频率的性能指标上,本文算法具有显著的优势.
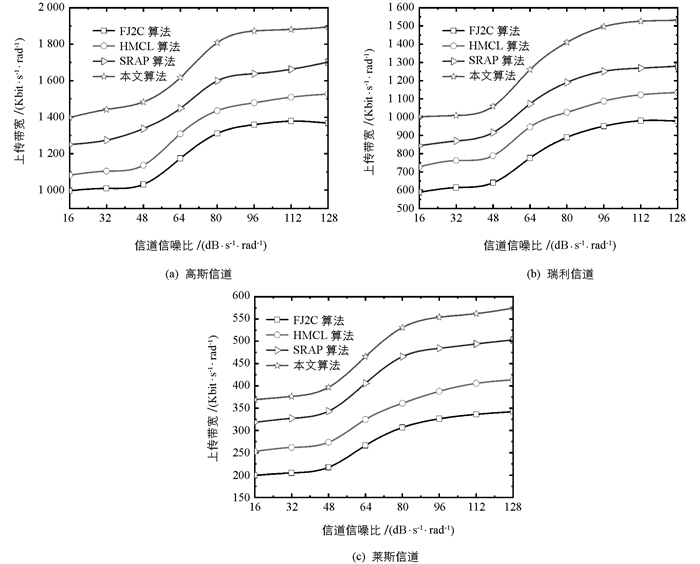
图 8(a)~(c)显示了本文算法在高斯信道、瑞利信道、莱斯信道3种实际部署环境下,与HMCL算法、SRAP算法及FJ2C算法的信号上传带宽对比情况,显然本文算法的信号上传带宽较高,且波动情况小,性能稳定.这是由于对于移动传感网而言,整个网络只有在定位准确时才能够顺利地完成信号上传.由定位精度仿真可知,本文算法的定位精度要显著高于对照组算法,且定位错误率较低,出现因定位错误而导致信号上传受阻的可能性较低;对照组算法由于采取的定位精度提升方式不足,如HMCL算法仅采用三点定位,SRAP算法及FJ2C算法未考虑多维度控制因素且无法对锚节点进行精度提升,因此,因定位故障而导致信号上传受阻的情况发生概率要高于本文算法;故而本文算法的信号上传带宽性能与3种对照组算法相比具有明显的优势.
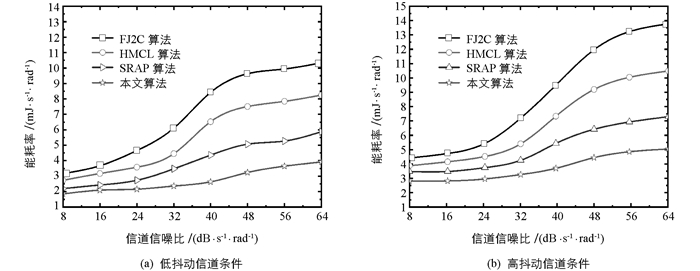
图 9(a)~(b)显示了在低抖动信道条件下(高斯信道)及高抖动信道条件下(莱斯信道),本文算法与对照组算法的能耗情况仿真实验结果.根据图 9可知,本文算法的能耗水平更低,且随着干扰程度增大,其能耗变化较为平稳;而HMCL算法、SRAP算法及FJ2C算法的能耗均要高于所提算法,当干扰强度增大时,其能耗增加幅度较大.尤其是在高抖动信道条件下,所提算法的优势更加明显.这是由于本文在同等信道信噪比条件下,锚节点定位频率较低,采用多维度精准定位方式确定锚节点,具有很强的抗噪能力,使得传输链路因背景噪声干扰而发生抖动的概率较小,因此信号上传能力要高于对照组算法,且本文算法通过粒子群的方式对流动性较大的节点进行精确定位,同时从信号漂移、锚节点漂移2个层面对链路抖动及信道干扰进行精确消除,改善定位过程中的频率偏移,准确实现锚节点坐标的获取,因而信号定位错误较低,定位过程中所消耗的额外能量要少于对照组算法,使得本文算法能够在能量受限的情况下以较低的能耗进行数据传输.
-
为解决当前LTE-5G技术背景下移动无线传感网在部署过程中存在信号源定位困难、数据链路防抖动性能差及信号上传带宽受限等难题,提出了一种基于旋跳自漂移修正机制的超高速移动WSN网络信号源定位算法;采取了基于旋跳修正机制信号强度-节点跳数区域定位、自漂移误差修正机制的锚节点初始化、粒子群精度提升机制3种方式,分别从信号漂移、锚节点误差控制、锚节点性能控制3个层次对影响超高速移动无线传感网定位过程中的信号漂移、锚节点误差控制困难、信号上传带宽性能较差等部署难题进行了有效的解决,与HMCL算法、SRAP算法及FJ2C算法相比,本文算法定位性能卓越,且信号上传带宽容量具有明显的优势,具有良好的实际部署价值.
下一步,将考虑本文算法控制机制复杂所带来的能量消耗较快等难题,通过引入能量控制机制与节能定位机制,进一步提高本文算法定位节点在高复杂定位环境中的生存及适应能力,促进无线传感网技术与LTE-5G通信技术的深度融合,促进本文方案在实际中的推广应用.