


 下载:
下载:
-
开放科学(资源服务)标识码(OSID):

-
鸟类能在多种复杂表面上起飞和降落. 生物力学研究表明[1-4],鸟类在着陆、栖息时会做出一系列的调整动作来控制与栖息物的接触和碰撞. 近年来,国内外学者基于鸟类起飞、降落及栖息的上述生物力学原理,并结合欠驱动拟人手臂设计方法[5-12],已设计开发出较多构型的仿生腿爪用于实现空中机器人的栖息[13-17].
与鸟类相比,空中机器人目前在抓取、运输或栖息于复杂形状物品方面的能力仍然有限. 许多具有抓取和栖息能力的空中机器人是为小范围的特定表面开发的,作业的可靠性不足[18]. 一些仿生鸟类的栖息装置并未使机器人实现成功的起飞和降落[13, 19-21],一些空中机器人的抓取装置仅能抓取静止物品[22-28]. 有些空中机器人可以在不规则或圆柱形表面上接近垂直地降落[29-34],包括摆好的一堆树枝或单个树枝表面[30]. 此外,多数空中机器人难以在栖息后实现快速的姿态控制和保持平衡,而这是栖息成功的关键因素[1]. 综上所述,尽管已有的空中机器人已经具有不同的空中抓取、栖息能力和特性,但它们都难以媲美鸟类在动态碰撞和可靠抓取各种复杂表面时所展现出的超凡能力.
本文提出了受猛禽启发的、可将瞬时碰撞能量被动转化为强大抓取力的欠驱动腿爪,有望实现机器人与树木、山石、屋檐等结构物的可控高速碰撞,碰撞后的平衡以及在高处或隐蔽处的可靠栖息,因而在遥感探测、搜救避险、环境监测等复杂环境中具备广泛的应用前景.
全文HTML
-
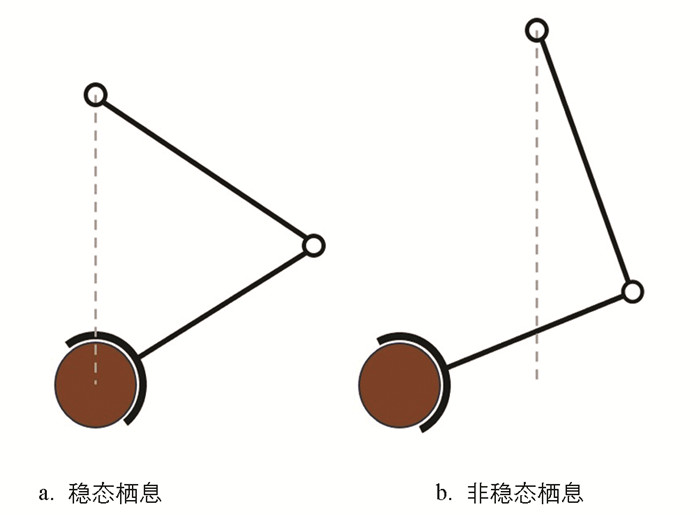
本文将仿猛禽机器人的稳态栖息条件定义为机器人(包含腿爪)的整体质心保持在栖息物形心的正上方. 如图 1所示,机器人降落到栖息物上之后,只有当机器人质心(假设位于上方铰链处)位于栖息物的形心(深色圆的圆心)正上方时,机器人重力作用线(虚线)通过栖息物形心,因此机器人重力相对于栖息物形心的倾覆力矩才最小化为零,此时机器人不会从栖息物上滑落,能实现力学平衡和稳定栖息.
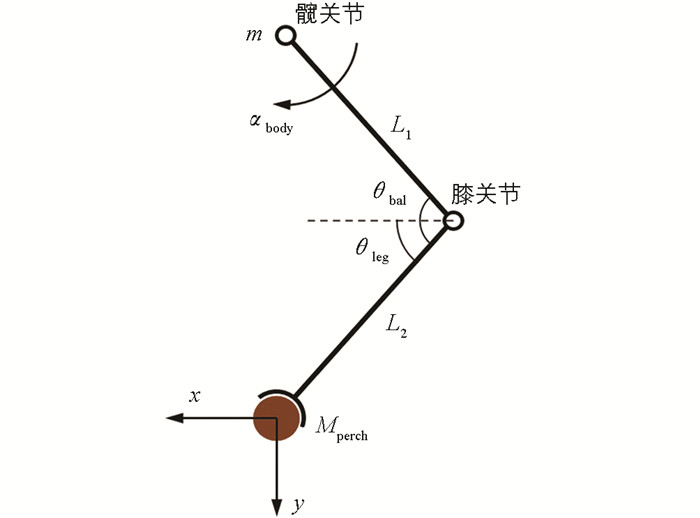
本文提出的仿猛禽机器人稳态栖息模型如图 2所示,猛禽腿爪关节主要包括髋关节、膝关节及爪趾关节,其中髋关节、膝关节为主动关节,爪趾关节为被动关节,爪部与小腿固结,无踝关节.
鸟类腿爪质量远远小于其躯干质量,为减小机器人腿爪转动惯量,本文忽略仿猛禽机器人的大、小腿质量,将机器人质量集中于躯干质心(即髋关节),记为m. 大、小腿长度分别记为L1、L2,大、小腿间的夹角θbal称为平衡角,θleg为小腿与水平面夹角,αbody为腿部绕躯干质心的角加速度,Mperch是腿爪对栖息物(假设为圆柱体)形心的倾覆力矩. 模型的惯性坐标系原点位于栖息物形心.
由图 2可知腿爪绕栖息物形心的倾覆力矩为:
式中:dperch为栖息物直径.
机器人栖息时,若平衡角过小,机器人的躯干和安装于躯干上的飞行平台会与周围环境产生干涉,影响姿态稳定. 因此,本文选择平衡角θbal的取值范围为85°~180°.
当θbal取最大值180°时,大、小腿拉伸共线,此时机器人显然处于非稳定栖息姿态(图 1b),对应的倾覆力矩为:
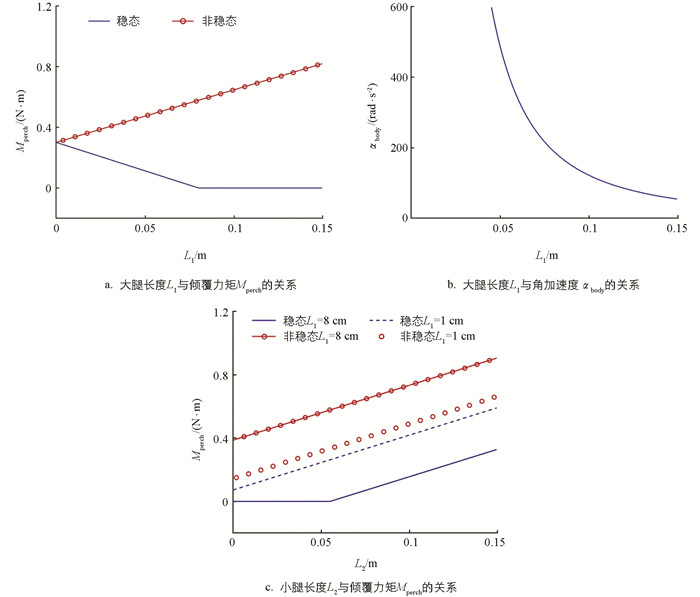
本文采用单变量法来研究大腿长度和小腿长度独立变化时对倾覆力矩的影响. 首先根据猛禽游隼(一种中等猛禽)腿部的解剖学尺寸[35]进行等比例缩放,设定机器人大、小腿尺寸范围为0~150 mm,根据三维建模和运动仿真确定其他参数,如表 1所示. 然后利用MATLAB数值计算软件,以1 mm为步长,逐一遍历搜索能够使式(1)取值为0(即Mperch=0)的大、小腿长度L1、L2的参数组合,求得的结果如图 3所示.
由图 3可知,在非稳态栖息模型中(对应式(2)),倾覆力矩随腿长L1、L2的增大而增大,而在稳态栖息模型中(对应式(1)),倾覆力矩可随腿长L1、L2的变化减小至零.
抓取腿爪绕机器人躯干质心(髋关节)的角加速度αbody与其转矩T的关系为
$\alpha_{\text {body }}=\frac{T}{J}$ ,因此角加速度αbody与转动惯量J成反比. 当腿长不断增大、转动惯量(与腿长成正比)太大时,会导致腿爪的角加速度αbody过小(图 3b),达到稳定栖息状态所需时间变长,难以满足设计要求.因此,为保证机器人降落后倾覆力矩最小,同时还满足大、小腿折叠时具有足够大的角加速度,使机器人能够稳定且快速地降落栖息,本文最终取Mperch=0时的最小腿长L1=0.08 m、L2=0.060 9 m作为大、小腿长度的最优值,如图 3a、3c所示.
-
机器人腿爪的抓握力主要用来平衡身体对栖息物接触表面的倾覆力矩,使机器人在栖息物上保持稳定的栖息姿态,而倾覆力矩恰好是角动量对时间的一阶微分. 腿爪和栖息物间相互作用引起的腿爪动量变化,即为二者间碰撞力产生的冲量. 仿猛禽机器人降落、抓握到栖息物的瞬间,需克服剧烈的线动量与角动量变化[36]. 为确保机器人的稳定栖息,有必要进行角动量及线动量建模,并由此推导、求解能够实现可控碰撞、满足稳定栖息条件的动力学参数.
本文将能够满足稳定栖息条件(倾覆力矩为零、满足动量约束)的动力学参数组合的分布域集合,定义为栖息成功参数域.
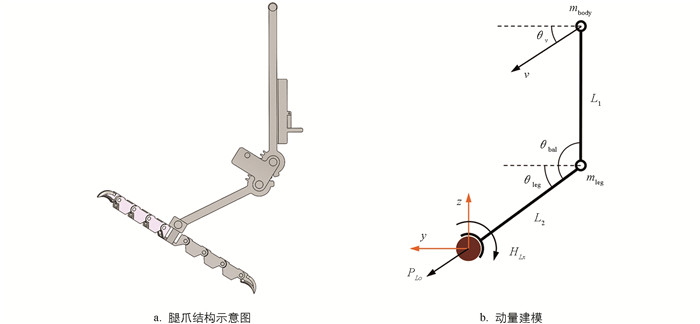
如图 4所示,本文用2个点质量对机器人进行动量建模. 一个点质量位于躯干质心(髋关节)处,记为mbody,表示躯干质量;另一个点质量位于大、小腿的总质心在小腿上的投影位置,记为mleg,表示大、小腿质量之和. HLx、PLo分别为机器人关于栖息物形心的角动量与线动量. 动量模型中关键的动力学参数包括躯干质心速度v、躯干质心速度角θv、小腿与水平面夹角θleg等.
对图 4b进行角动量建模:
式中:Lleg,com为腿部质心在小腿上的投影至足底的距离;tcollapse为大、小腿间的夹角θbal由初始值减小至0°(大、小腿完全折叠)的时间;d为栖息物直径. 为了模拟重力的影响,本文在真实角动量HLx的基础上,增加了一个随小腿与水平面夹角θleg变化而变化的重力附加角动量HLx,grav. HLx,eff为总的角动量.
参考猛禽和树木栖息相关的动力学数据[37],本文将机器人躯干初始速度为0时,垂直降落在栖息物上所获得的角动量作为角动量最小值,计算可得HLxmin=1.471 5(kg·m2/s),这足以使大、小腿折叠. 最大值设置为最小值的2倍,即HLxmax=2.943(kg·m2/s).
对图 4b进行线动量建模:
式中:PLo为机器人关于栖息物形心O的线动量. 重力也对线动量产生影响,本文通过添加一个重力附加线动量PLo,grav来模拟这种影响,该动量等于大、小腿折叠时,机器人垂直下落所获得的动量. PLo,eff为总的线动量.
参考猛禽和树木栖息相关的动力学数据[37],本文设置线动量的取值范围如下式所示. 与角动量类似,线动量必须足够大以便使大、小腿折叠,但又不能过大以防损坏腿爪.
-
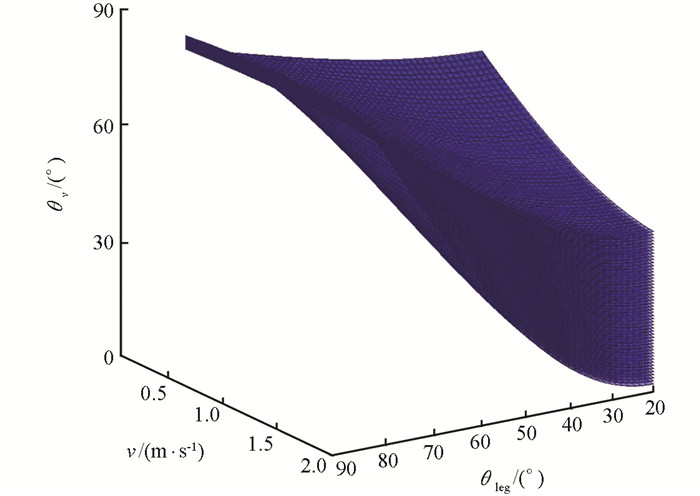
栖息成功参数域是一个能够确保成功栖息的机器人本体结构、运动学、动力学和栖息特征的多维参数空间,如倾覆力矩、角动量/线动量、关节转角(θleg、θv)、躯干质心速度、爪趾抓握力等参数. 为实现机器人在栖息物上稳定可靠地起飞、降落和姿态平衡,必须权衡和选择合理的多维参数取值范围.
上述动力学参数往往是相互耦合的[4],调整其中一个参数可能会引起其他参数发生变化,故而难以求得单个参数的全局最优解,但有望求得一些组合参数的全局较优解.
参照猛禽(游隼)腿爪结构和树木栖息相关的动力学数据[37],本文选取躯干质心速度的取值范围为0~2 m/s、躯干质心速度角的取值范围为0°~95°、小腿与水平面夹角的取值范围为20°~90°. 其余参数根据三维运动仿真结果确定. 相关动力学参数取值如表 2所示.
本文基于MATLAB软件环境,对表 2中栖息动力学参数的取值空间进行离散化,逐一遍历由躯干质心速度、躯干质心速度角、小腿与水平面夹角生成的三维参数组合(其余参数设定为常数),计算并检测每一参数组合求得的倾覆力矩、角动量和线动量是否满足稳定栖息条件约束,最后将满足约束条件的组合分布空间绘制成栖息成功参数域. 图 5显示了能够实现成功栖息的v、θv、θleg参数组合.
2.1. 抓取腿爪动量建模
2.2. 满足倾覆力矩及动量约束的栖息成功参数域求解
-
根据鸟类着陆的动力学机理,本文设计了一种能在复杂表面上稳定起飞、降落、栖息的腿爪,它可以帮助仿猛禽机器人可靠锁定与它接触的栖息物,使机器人在非结构化环境中进行长时间观测,而不会在飞行中耗尽电量. 本文提出的仿猛禽机器人的腿部及爪趾尺寸均参照游隼体型进行等比例设计.
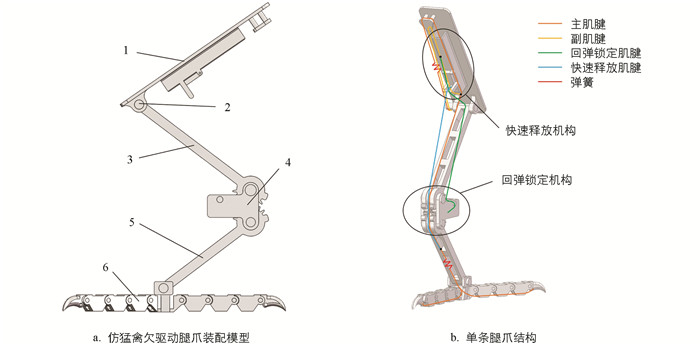
如图 6所示,本文借鉴游隼后肢的解剖结构和抓握机理,为机器人设计了一对完全相同的抓握腿爪,每条腿爪包括躯干、大腿、小腿、爪趾部件,以及髋关节、膝关节、爪趾关节. 仅在髋关节处设置1个抓握驱动电机和1个调姿驱动电机,其中抓握电机驱动爪趾开合、产生抓握力,调姿电机调节腿爪位姿、维持机器人的姿态平衡.
决定栖息成功参数域范围的关键本体结构是本文设计的重点,包括能够瞬间强力折叠腿部、瞬间闭合爪趾以准备抓握栖息物的快速释放装置(图 7),以及通过棘轮自锁/解锁确保爪趾可靠抓握的回弹锁定机构(图 8).
-
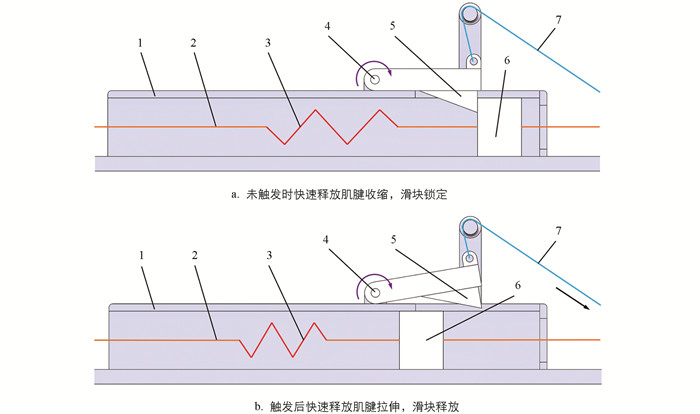
快速释放装置由螺钉固定于髋关节上部的机器人躯干处,由导轨、滑块、主肌腱、主弹簧、扭簧、限位块、快速释放肌腱等组成. 滑块在导轨中滑动,限位块用来限制或释放滑块运动. 通过拉动快速释放肌腱,可控制限位块的锁定与释放. 释放过程开始前,滑块前端主肌腱和主弹簧拉伸,大、小腿绷紧,膝关节不转动,快速释放肌腱内无拉力,同时扭簧为限位块提供扭矩,将滑块锁定(图 7a).
当爪趾抓握、撞击栖息物时,冲击力使得腿爪膝关节弯曲,大、小腿开始折叠,使爪趾绕其关节弯曲产生抓握力并瞬间包裹栖息物表面,从而将冲击力转化为抓握力,被动吸收冲击能量. 随后大、小腿的大幅度折叠导致环绕膝关节的快速释放肌腱和主弹簧被持续拉伸,拉力增大至触发值的瞬间限位块被扳开,高速释放先前被锁定的滑块. 滑块急剧压缩与其共线的躯干主弹簧并释放出大量能量(图 7b),将抓握电机先前储存在主弹簧中的全部能量沿着穿过腿部、爪趾的主肌腱高速释放到爪趾,生成额外抓握力. 再加上原来与栖息物撞击获得的能量使爪趾弯曲生成的抓握力,最终形成比驱动电机单独驱动时所能提供的更大抓握力.
-
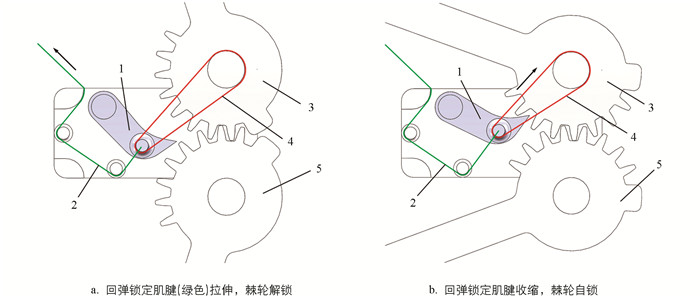
回弹锁定机构通过膝关节处的自锁棘爪[38]来保持大、小腿折叠到位时折叠缓冲系统的额外抓握力,并防止回弹,确保可靠抓取.
本文设计的仿猛禽欠驱动腿爪,采用弹簧和线缆制作仿生肌腱,电机模拟肌肉驱动肌腱. 如图 6b所示,驱动电机连接主肌腱与副肌腱,可以驱动爪趾张开和闭合,控制回弹锁定机构的解锁和锁定. 主肌腱一端系在抓握电机伸长轴上,连接与之共线的躯干主弹簧,另一端穿过快速释放装置后绕过膝关节,通过小腿弹簧后分为3根系在3根爪趾的爪尖处. 副肌腱一端系在抓握电机滑轮上(与主肌腱缠绕方向相反),另一端绕过躯干柱形结构后连接在主肌腱上,连接处位于快速释放装置附近,负责复位快速释放装置. 膝关节用1根弹性橡皮筋将锁定棘爪被动地固定在自锁位置.
当腿爪抓握、撞击被抓物体时,大、小腿受冲击力影响开始折叠,驱动电机开始工作,放松回弹锁定肌腱,此时棘爪未锁定(图 8a). 随着回弹锁定肌腱的放松,棘爪在弹力绳的收缩下迅速将棘爪卡紧在大、小腿齿轮之间,与齿轮被动地锁定在一起(图 8b),使得大、小腿无法相对转动,此时驱动电机停止工作,因而能够保持由快速释放装置提供的强大抓握力并防止回弹,确保抓握可靠. 当需要机器人与栖息物脱离时,通过控制驱动电机反转,拉紧回弹锁定肌腱解锁膝关节的棘爪,此时大、小腿解锁,进而与栖息物脱离.
由上述仿猛禽欠驱动抓握腿爪结构设计原理及方案可知,机器人腿爪的结构决定了其能否高效吸收冲击能量和可靠抓握,实现驱动器能耗少、抓取范围广、控制简单、抓握力大等运动学、动力学性能. 本文提出的仿猛禽抓握腿爪的结构设计,对于机器人稳态栖息的实现和栖息成功参数域的求解具有极其重要的意义.
3.1. 结构设计原理
3.2. 快速释放装置结构设计
3.3. 回弹锁定机构设计
-
1) 提出了一种仿猛禽机器人,求解得到了满足稳态栖息条件,倾覆力矩最小,平衡响应速度较快的大、小腿尺寸最优解,获得了满足倾覆力矩及角动量/线动量约束、能够实现稳定栖息的栖息成功参数域.
2) 设计了可将瞬时碰撞能量被动转化为强大抓取力的快速释放装置和可通过棘轮、棘爪自锁来被动保持可靠抓握状态的回弹锁定机构.
上述研究成果为仿猛禽带腿爪机器人在遥感探测、搜救避险、环境监测等非结构化环境中的广泛应用奠定了重要的理论和方法基础.