


 下载:
下载:

-
农业作为第一产业, 一直是我国关系国计民生的根本大事.在科学技术日新月异的今天, 如何用技术改善农业生产及农作物状态监控的效率成为一个重要的课题[1-2].
利用人眼对农作物状态的监控和检测, 不仅无法保证24 h不间断地连续工作, 也无法保证检测结果的准确性.摄像机作为视觉传感器可以拍摄到农作物状态的丰富信息, 配合以计算机视觉处理方法可以实现农作物状态的自动检测, 无论在检测准确率和检测效率上都大大优于人工方法[3].
在农作物状态图像中, 含有农作物的颜色信息、纹理信息和形状信息, 如果能综合使用这些信息作为检测结果的判断依据, 必将提升检测结果的可信度.从现有的方法来看, 整体颜色信息作为颜色状态的检测手段被更多地使用, 但其在R, G, B这3个通道上的颜色信息被忽视[4-5].边缘特征是对农作物状态细节信息进行描述的一个有效手段, 常见的边缘检测方法也很多, 包括Roberts检测、Sobel检测、Canny检测等等[6-8].如果将这些检测结果同颜色分量信息结合起来, 对于提升检测结果的准确性具有更加重要的意义.
本文将以摄像机为传感器获取农作物状态信息, 进而提取颜色分量图像, 并在分量图像上执行边缘检测, 将这些信息融合起来作为农作物状态的检测依据.
全文HTML
-
摄像机所能拍摄到的农作物状态图像都是比较普遍的彩色图像, 虽然彩色图像的存储方式很多, 但以RBG空间的存储格式最为常见.农作物状态图像中任何一个像素的彩色信息, 都是由R, G, B这3个颜色分量信息组合而成.
当一幅农作物状态图像存储在计算机中, 可以表示成如下的形式:
这里, 参数C用于表达农作物状态图像中任何一个像素的颜色.
根据上面的表达, 可以从农作物状态图像中每个像素的颜色中提取出R, G, B信息, R, G, B三色信息的计算为
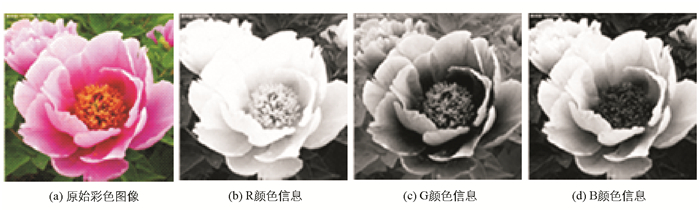
如图 1所示, 是一幅彩色的花卉作物图像, 按照上面的方法分解成R, G, B这3个颜色信息分量的效果.
-
边缘信息是图像内容中细节特征最细致的表达, 因此在计算机视觉领域中最为常用.为了提取出这些特征, 人们设计了很多方法, 如基于Roberts算子的边缘检测方法、基于Sobel算子的边缘检测方法、基于Canny算子的边缘检测方法等等.
基于Roberts算子的边缘检测方法, 原理简单, 并且在编程中易于实现, 因此成为本文农作物状态图像边缘提取中选择的方法.
基于Roberts算子的边缘检测方法, 实质上是求偏导数处理, 对应的数学实现为
这里, 参数f(x, y)用于表示图像中任一位置的像素, 上式中2个偏导求取过程为
进一步延伸上面的处理过程, 就可以获得任意位置像素在4个方向上的偏导计算, 即
仍然以图 1中给出的花卉图像为处理对象, 对其按照上面的方法进行边缘检测, 结果见图 2.
-
当一幅农作物状态图像采集完成后, 先按照提取颜色参数公式(1)对其进行R, G, B三色图像提取, 进而在R, G, B图像上完成颜色直方图的统计, 获得对应的颜色信息特征.之后, 在R, G, B图像上进行边缘检测, 获得对应的边缘信息特征.这样, 每一幅农作物状态图像演化为6个特征信息.
为了便于判断农作物的状态特征, 先将一些标准图像放在查询数据库中, 对这些标准图像进行类似的颜色信息和边缘信息的特征提取.然后, 摄像机拍摄存储一幅农作物状态图像, 就对这样的图像进行颜色信息和边缘信息的特征提取, 并将实时采集来的图像和标准图像的6个特征进行对比, 从而做出判断.
首先, 构建颜色信息特征的检测测度, 对实时采集图像和标准数据库中的图像进行颜色直方图距离计算.
这里, HRD(i)表示的就是标准数据库图像的R分量信息图像的颜色直方图, HRQ(i)表示的就是实时采集图像的R分量信息图像的颜色直方图.
这里, HGD(i)表示的就是标准数据库图像的G分量信息图像的颜色直方图, HGQ(i)表示的就是实时采集图像的G分量信息图像的颜色直方图.
这里, HBD(i)表示的就是标准数据库图像的B分量信息图像的颜色直方图, HBQ(i)表示的就是实时采集图像的B分量信息图像的颜色直方图.
其次, 构建边缘信息特征的检测测度, 对实时采集图像和标准数据库中的图像进行边缘信息距离计算.
这里, NRD(i)表示的就是标准数据库图像的R分量信息图像的边缘信息, NRQ(i)表示的就是实时采集图像的R分量信息图像的边缘信息.
这里, NGD(i)表示的就是标准数据库图像的G分量信息图像的边缘信息, NGQ(i)表示的就是实时采集图像的G分量信息图像的边缘信息.
这里, NBD(i)表示的就是标准数据库图像的B分量信息图像的边缘信息, NBQ(i)表示的就是实时采集图像的B分量信息图像的边缘信息.
至此, 农作物状态标准图像和实时采集图像的3个颜色测度和3个边缘信息测度都得到了, 可以构建出总体的检测测度.
这里, α1, α2, α3分别表示了3个颜色信息测度的权重, α4, α5, α6分别表示了3个边缘信息测度的权重. 6个权重都设定为0.17, 即对3个颜色测度权重和3个边缘测度权重按同样大小来处理[9-11].
2.1. 三色图像的边缘提取
2.2. 农作物状态检测测度设计
-
展开实验研究, 以验证本文提出的三色信息分离和边缘检测方法的有效性.水果等农作物的品质是人们日常生活中关注的重要问题, 水果品质的好坏也直接影响到市场上的消费情况.为此, 实验以西瓜为具体的农作物检测对象, 按照本文提出的方法对其品质进行检测.
实验设计如下:①选择清晰的西瓜图像120幅构造一个小型的标准图像数据库, 这些图像中包含有缺陷的西瓜、正常的西瓜、不同形状的西瓜, 每幅标准图像都用等级和品质进行标注, 以备检测时使用. ②在西瓜采摘现场或西瓜分拣生产线上实时拍摄西瓜图像. ③分别对标准西瓜图像和采摘西瓜的拍摄图像进行颜色信息和边缘信息提取, 并执行公式(12)的判断得出结论.
-
(1) 第一组西瓜样品的状态检测
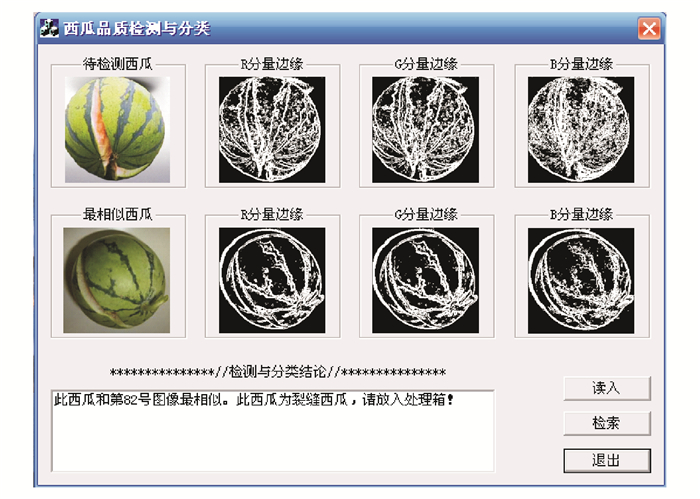
第一组西瓜样品的状态检测结果如图 3所示.
图 3中主视图区域分为上、下两排图像, 上排图像是实时采集到的西瓜样品, 包含了西瓜样品的彩色图像、R信息图像、G信息图像、B信息图像;下排是数据库中的标准西瓜, 包含了标准西瓜的彩色图像、R信息图像、G信息图像、B信息图像.下排显示的结果, 也是数据库中和上排样品最相似的图像, 根据下排标准西瓜的标注信息, 可以得到品质检测结果和处理结果.从图 3中可以看出, 此西瓜是一个带有裂缝的西瓜, 应放入处理箱, 不能直接包装销售.
(2) 第二组西瓜样品的状态检测
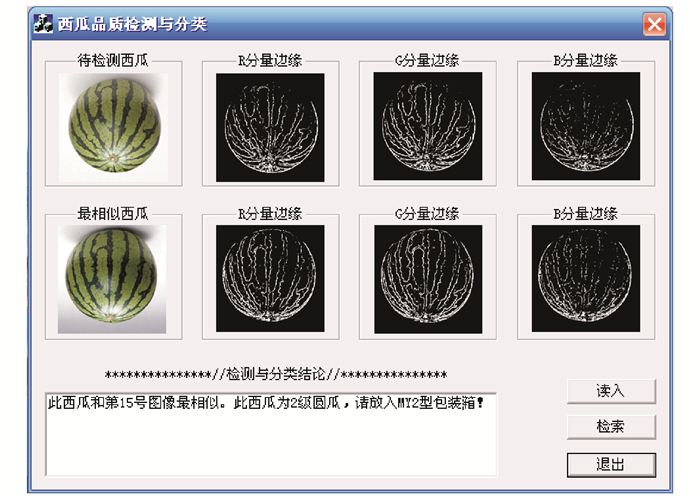
第二组西瓜样品的状态检测结果如图 4所示.
图 4中主视图区域分为上、下两排图像, 上排图像是实时采集到的西瓜样品, 包含了西瓜样品的彩色图像、R信息图像、G信息图像、B信息图像;下排是数据库中的标准西瓜, 包含了标准西瓜的彩色图像、R信息图像、G信息图像、B信息图像.从图 4中可以看出, 此西瓜是一个品质良好的西瓜, 应放入MY2型包装箱, 可以包装销售.
(3) 第三组西瓜样品的状态检测
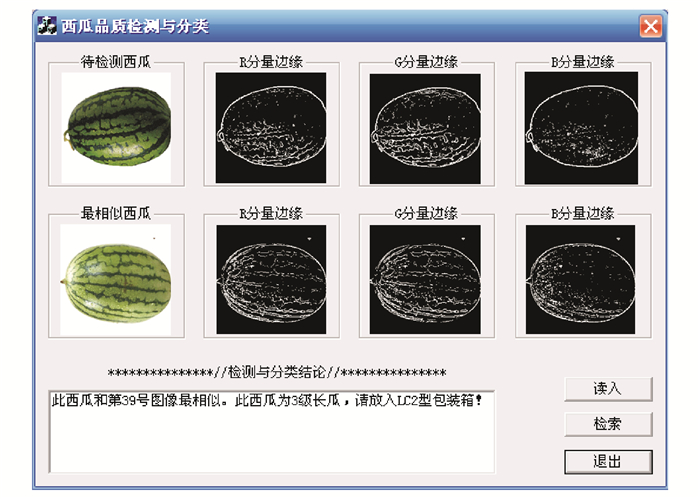
第三组西瓜样品的状态检测结果如图 5所示.
图 5中主视图区域分为上、下两排图像, 上排图像是实时采集到的西瓜样品, 包含了西瓜样品的彩色图像、R信息图像、G信息图像、B信息图像;下排是数据库中的标准西瓜, 包含了标准西瓜的彩色图像、R信息图像、G信息图像、B信息图像.从图 5中可以看出, 此西瓜是一个品质良好的西瓜, 应放入LC2型包装箱, 可以包装销售.
进一步比较本文方法同人工检测、光谱检测等方法的检测准确率, 结果如表 1所示.
从表 1中的数据可以看出, 本文方法在不同样本数量下, 检测准确率都明显高于人工检测方法和光谱检测方法.
3.1. 实验背景
3.2. 实验结果与分析
-
本文针对农作物状态的智能检测问题, 提出了基于三色信息图像分解和颜色边缘特征融合的检测方法. ①按照农作物图像的计算机表达, 将原始的彩色图像分解成R, G, B这3个信息分量图像. ②在每个分量图像上计算颜色直方图获得颜色特征, 执行Robert算子获得边缘特征. ③构建了基于3个颜色特征和3个边缘特征的相似性测度.针对西瓜图像的实验结果表明, 本文方法可以获得农作物的丰富信息, 3个分量颜色信息和边缘信息的融合使用, 对于西瓜品质的检测达到了非常好的效果.