


 下载:
下载:
-
PS技术的发展使得伪图像现象层出不穷,这对人们信息的获取造成了一定的负面影响[1-2].对此,人们提出很多方法来检测图像中篡改的内容.基于图像块检测的方法是一种常用的图像伪造检测方法,如周萌萌等人[3]对计算所得的亮度图像以及局部亮度变化图像进行图像分块,并计算每个图像块对应的共轭不变矩,利用共轭不变矩特征值对图像块进行分组,接着对临近组的图像块进行相似值测量,进而检测出伪造内容,实验表明,该方法能对伪造图像进行检测,而且检测速度很快,但是对于经过旋转后的伪造图像效果不佳.对此,Ghulam等人[4]利用可控金字塔获取特征点,再利用局部二值模式完成检测,实验表明,该方法对弥补前面的检测缺陷具有一定的效果,但是检测结果存在一定的错误.又如Zheng等人[5]利用SIFT算法良好的仿射不变性能,提出了一种基于块联合特征点的图像伪造检测算法,进而完成图像伪造检测,实验表明,该方法具有很好的鲁棒性能,对伪造图像检测效果良好,但是检测结果存在漏检测现象.朱叶等人[6]利用图像DOG区域提取方法检测图像的特征点,接着利用MIOP方法生成特征描述子,通过欧氏距离比值的方法进行特征匹配,进而用RANSAC方法去除误匹配,精确定位伪造图像,实验表明,该方法检测效果较好,而且具有较好的鲁棒性能,但是该方法生成的特征描述子维度太高,导致算法的计算量太大.
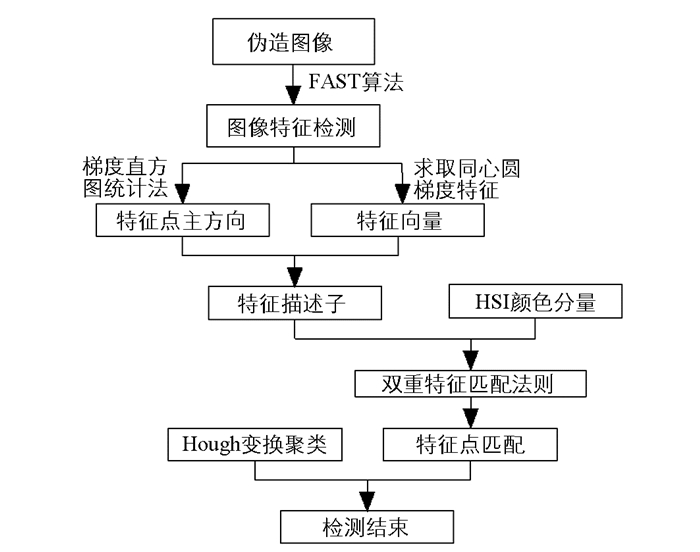
对此,本文提出了一种基于双重特征匹配耦合Hough变换聚类的图像伪造检测算法.首先,引入FAST算法对图像进行特征检测,利用特征点的梯度特征,通过梯度直方图统计法以及求取同心圆梯度特征分别获取特征点的主方向以及特征向量,生成较低维度的特征描述子;然后,将特征点的HSI颜色分量以及特征点的特征向量作为特征点的双重特征,利用双重特征匹配法则,进行特征点的匹配;接着,通过Hough变换对匹配后的特征点进行聚类,完成伪造内容的检测和定位.最后,测试该算法的检测性能.
全文HTML
-
该图像伪造检测算法包含4个步骤:①检测图像特征;②生成特征描述子;③特征点的匹配;④基于Hough变换的匹配优化.如图 1所示.
-
FAST算法是一种常见的图像特征检测算法,具有检测精度好、检测效率高等特点[7-8].因此,本文选用FAST算法对图像进行特征检测.
FAST算法首先对某一目标像素点邻域内的像素点灰度值进行判断,若有一定数量邻域像素点的灰度值与目标像素点的灰度值差别较大,则将该目标像素点视为特征点. FAST算法检测图像特征的具体过程如下所示[9]:
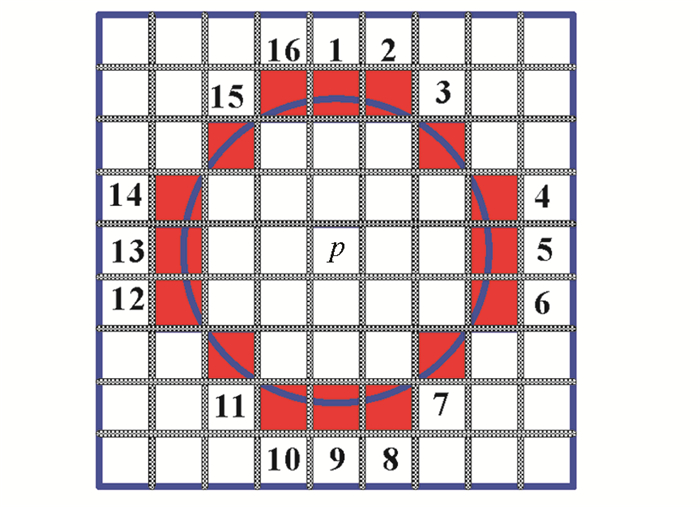
将任一像素点p视为圆心,构造一个如图 2所示的半径为3的Bresenham圆形区域模板.令模板上邻域16个像素点中第i个像素点对应的灰度值为G(i),圆心像素点p对应的灰度值为G(p),求取圆形模板上16个像素点中与p点的灰度差值大于阀值α的像素点数量u,
若满足u≥β,则判定像素点p为一个检测到的特征点,其中,β为一个阀值常数.
由于在p点圆形邻域上的16个像素点中,1,5,9,13这4个像素点与p点的关系最为密切[10].因此,本文在按照FAST算法计算像素点灰度差值之前,先分别计算圆形区域模板上1,5,9,13这4个像素点与p点的灰度差值.若这4个像素点与p点的灰度差值都大于阀值α,则按照FAST算法执行剩下的步骤;否则停止执行FAST算法剩下的步骤,将圆心处像素点判定为非特征点.由此,可减少像素点之间灰度差值的计算次数,对FAST算法的计算复杂度进行了优化,从而提高算法的检测效率.
-
对于每一个通过FAST算法检测到的特征点,需要生成特征点对应的特征描述子,以对不同特征点的特征进行描述区分.特征描述子的生成由获取特征点的主方向以及获取特征向量2部分构成.在此,将利用梯度直方图统计法获取特征点的主方向,以特征点为中心,构建二级同心圆区域,通过求取同心圆域内的梯度特征来获取特征向量,从而生成特征描述子.
对于任意像素点h(x,y),其对应的梯度模值GM(x,y)和梯度方向Gθ(x,y)的表述如下所示[11-12]:
梯度直方图的建立是以特征点邻域内像素点的梯度模值以及梯度方向为依据的,随后对其进行统计.将直方图的角度范围设定为[0°,360°],分为36个柱体.将直方图中最大值对应的方向确定为特征点的主方向,0.8倍最大值对应的方西确定为辅方向[13-14].
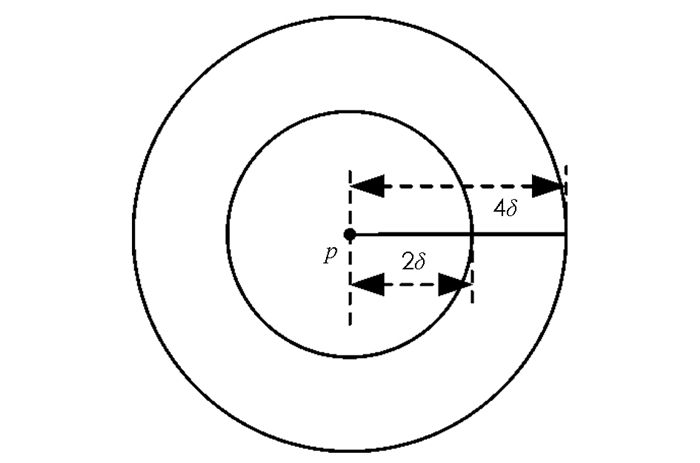
以尺度因子为δ的特征点p为中心,构造一个如图 3所示的,半径为4δ的二级同心圆.接着,以主方向为起点,30°为步长,将同心圆分割成12块,计算2个同心圆内分割块上像素点的梯度模值与梯度方向.然后,求取每个同心圆上的梯度总和.由此,每个同心圆均可获得一个12维的向量.将第一级(内部)同心圆生成的向量视为第1~12维向量F1=(f1,f2,f3,…f12),将第二级(外部)同心圆生成的向量视为第13~24维向量F2=(f13,f14,f15,…f24).最后,将每个同心圆中生成的向量进行归一化处理:
将每个同心圆内进行归一化处理后所得的向量,按照向量值大小,进行降序排列,由此可得到一组24维的特征向量F,从而完成特征描述子的生成.
-
为了克服梯度特征匹配的单一性,防止梯度特征匹配较好,而颜色特征差异较大引起的错误检测等.本文将通过提取特征点的HSI颜色分量,利用HSI颜色分量以及特征点的特征向量作为特征点的双重特征,设计双重特征匹配机制.HSI颜色分量富含了图像的颜色以及亮度等信息,其中H分量表示色调、S分量表示饱和度、I分量表示亮度[15].特征点p对应的H,S,I分量的提取依赖于该点的RGB分量而实现,特征点p对应的H分量Hp表示如下所示[16]:
式中,φ的表述为
特征点p对应的S分量Sp表示如下所示:
特征点p对应的I分量Ip表示如下所示[17]:
获取到特征点对应的HSI颜色分量后,将其与特征点的特征向量作为双重特征,从而制定双重特征匹配法则.
首先,令特征点p获取到的HSI颜色分量为C(p),则归一化处理后的分量C′(p)为
然后,令特征点p对应的特征向量为Fp.通过类似的方法可以获取另一特征点q对应的特征向量Fq以及归一化处理后的HSI分量C′(q).求取特征点p和特征点q对应特征向量的内积N(p,q),以及归一化处理后的HSI分量的内积N′(p,q),
最后,若特征点p和特征点q对应的特征向量以及归一化处理后的HSI分量的内积都大于th,则判定特征点p和特征点q为一对匹配特征点.其中,th∈(0,1]为预设阀值.
-
Hough变换[18]通过2个Hough参数来实现特征点的聚类.令p(a,b)为匹配后的一个特征点,将其坐标(a,b)视为一个Hough参数对,则可构成一直线L,其函数为[18-19]
通过直线L与坐标系之间的关系,可变形得到:
式中,ω∈(0,π)为直线L与x正半轴的夹角.由此可见,Hough参数对(a,b)可对应转化为(d,ω)参数对.
接着采用离散域统计表决方法[20-21]统计位于同一Hough参数对上的特征点数量,若该数量大于阀值,则认为这些特征点为一个聚类.
1.1. 图像特征检测
1.2. 生成特征描述子
1.3. 特征点的匹配
1.4. Hough变换聚类
-
为了测试所提算法的合理性与优异性,将文献[22]、文献[23]以及文献[24]视为对照组.在Intel I3双核处理器、500GB硬盘、4GB内存、操作系统采用Windows 7的PC机上,采用MATLAB 7.0软件作为仿真环境进行仿真实验.实验中采用了简单的复制粘贴篡改以及旋转缩放篡改方法伪造的图像进行测试.
-
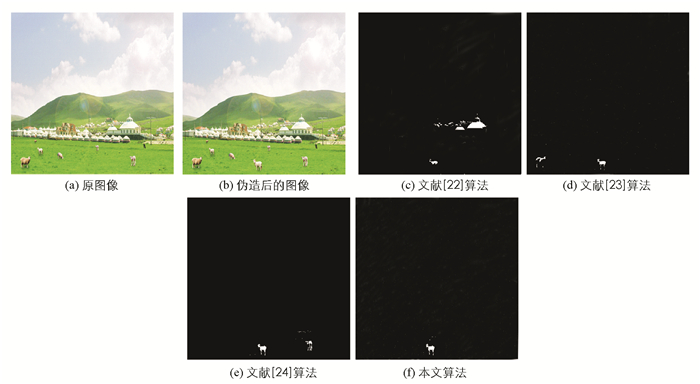
图 4为不同算法对复制粘贴篡改图像的检测结果,该图中存在多个相似的目标,准确检测其中的伪造内容具有较大的难度.图 5为不同算法对缩放篡改图像的检测结果.通过对比图 4中不同算法的检测结果可见,文献[22]中算法的检测结果(见图 4(c))中存在较多的错误检测,把部分蒙古包误检为伪造内容;文献[23]中算法的检测结果(见图 4(d))中存在检测偏差以及漏检测现象,将旁边的羊误认为是伪造内容;文献[24]中算法的检测结果(见图 4(e))中存在误检现象,将另外一只羊误识别为伪造内容;而本文算法的检测结果(见图 4(f))中能够准确识别篡改区域.
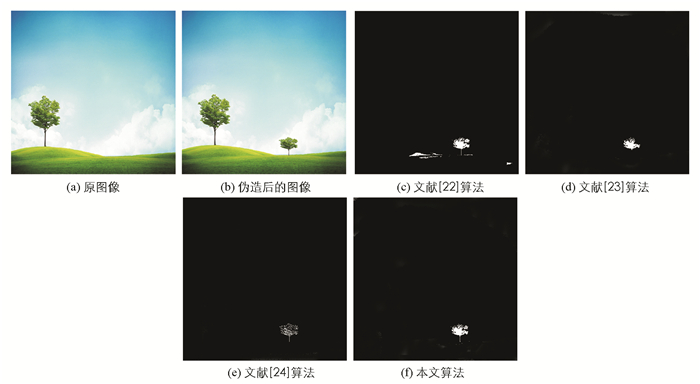
通过对比图 5中不同算法的检测结果可见,文献[22]中算法的检测结果(见图 5(c))以及文献[23]中算法的检测结果(见图 5(d))中都存在较大的检测偏差以及漏检测现象,文献[24]中算法的检测结果(见图 5(e))中较本文算法的检测结果(见图 5(f))中也存在少量信息的漏检测现象,说明本文算法的检测效果最好,能够较为准确地检测出篡改区域.
-
由于旋转篡改是当前图像伪造检测技术的主要对象,是衡量伪造检测算法的重要指标[4],为此,本文从Waterloo BragZone数据集中选取10组不同旋转角度篡改的图像作为样本,借助不同的算法对其完成伪造测试;并记录平均耗时以及不同算法的检测正确度,以此作为不同算法的量化测试结果.
以图 4(b)为例,利用不同算法对其检测,结果如表 1所示.从表 1可见,本文算法检测的平均耗时为3.153 4 s,相对对照组算法而言,本文算法的平均耗时最少,说明本文算法的效率最高.
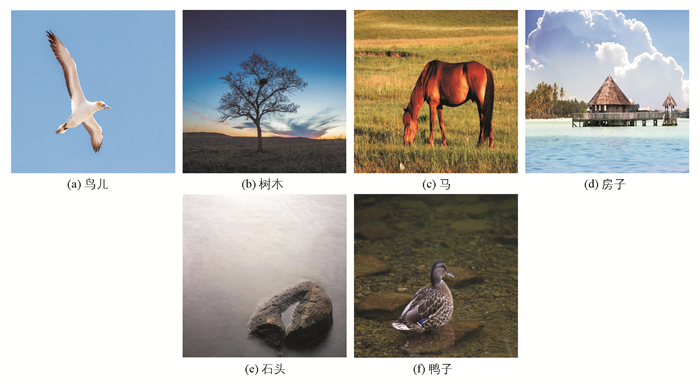
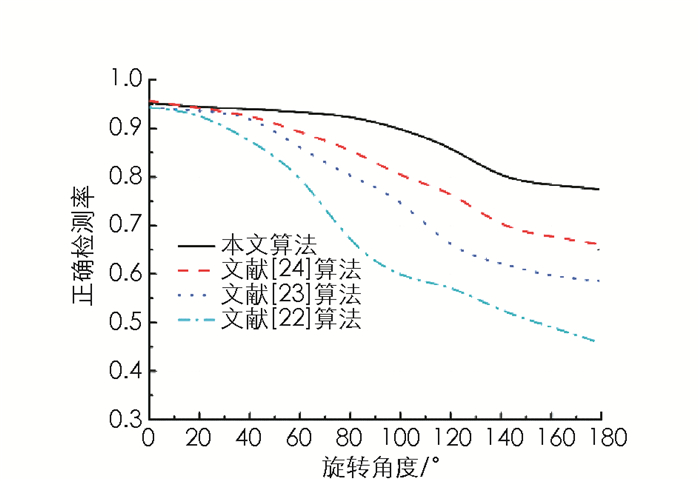
随后,从USC-SIPI数据集[25]中随机择取6幅图像,见图 6(a)~图 6(f),利用PS软件复制图像中的鸟儿、树木、马、房子、石头以及鸭子,并对其施加17种不同的旋转角度,将旋转后的内容复制粘贴到对应的图中,从而形成102幅篡改图像.再利用所提技术与对照组方法来完成伪造检测,取其平均正确检测率为量化结果,见图 7.
从图中可见,本文算法在不同旋转角度篡改下,其检测正确度始终是最高的,且较为稳定,即使发生180°篡改,其正确检测度仍然可保持在0.774左右;而其他3种对照组在大角度篡改下,其正确检测率均不理想.主要是本文引入了FAST算法来检测图像中的特征点,同时还通过梯度直方图统计法以及求取同心圆在指定方向上的梯度特征的方法获取了较低维度的特征描述子,从而提高了算法的检测精度以及检测效率.另外本文还利用HSI颜色分量以及特征点的特征向量作为特征匹配的双重条件,提高了特征匹配的正确度,利用Hough变换对篡改内容进行精确地定位,从而进一步提高了算法的检测正确度以及鲁棒性能.文献[22]依靠SIFT算法来获取图像的特征描述子,最终实现对伪造区域的检测,但是SIFT算法提取的特征点纯度不高,混杂了较多的伪特征点,而且SIFT算法生成的特征描述子维度较高,导致其检测正确度以及检测效率不佳.文献[23]中算法对噪声图像检测效果较好,但由于采用贝叶斯规则计算复杂度较高,而且采用的凸优化机制难以对复杂的篡改内容进行识别,使其检测耗时较多并且检测正确度不高.文献[24]中算法由于采用的是Gabor小波变换计算较为耗时,而且定义的局部相位量化技术难以顾及检测图像的全局性,导致检测效率以及检测正确度有所下降.
2.1. 不同算法的图像伪造检测结果测试
2.2. 量化测试
-
本文提出了一种基于FAST算子与多特征匹配的图像伪造检测技术.引入FAST机制,实现对图像特征点的准确提取;在生成特征描述子时,采用了梯度直方图统计法获取主方向,通过对圆域内的梯度总和进行计算,同时排序获得特征向量,从而输出24维的特征描述子,降低了算法的计算复杂度.在特征匹配时,利用特征点的HSI分量以及特征向量建立了双重特征匹配法则,完成特征点的匹配,从而提高了算法的鲁棒性以及检测正确性.引入Hough变换,对特征点完成分类,优化篡改内容的识别.最后,通过对不同的篡改伪造图像进行测试,验证了本文所提技术的有效性与合理性.