


 下载:
下载:

-
永磁同步电机(PMSM)以其高动态性能、高效率、轻量化的特点,被广泛应用于新能源汽车、轨道交通、工业机器人等领域[1-2].永磁同步电机调速系统是一个强耦合、复杂的非线性系统,普遍采用矢量控制策略,矢量控制技术使得永磁同步电机获得类似直流电机的优越控制性能[3].传统的比例积分(Proprotional Integral,PI)速度控制器和PID速度控制器因具有结构简单、鲁棒性高的优点而广泛应用于永磁同步电机调速系统中,然而PI/PID速度控制器的性能易受系统参数、噪声、温度变化和不确定动态载荷等因素的影响[4],并且当精确系统模型未知时,PI/PID参数很难确定,这些特点限制了永磁同步电机在高性能场合的应用.因此,研究出鲁棒性强、动态性能好的PMSM速度控制策略,成为了国内外学者关注的热点.
近年来,很多先进的控制方法应用到了永磁同步电机调速系统控制中,如模糊控制[4-5]、神经网络控制[6-7]、滑模控制[8-10]、小波控制[11-12]等.文献[9]针对感应电机,提出了一种基于滑模神经—模糊算法的模型参考自适应电机速度控制器,采用模型参考自适应进行电机速度估计,并基于电机速度误差信号对神经网络连接权重进行自适应调整,有效地提高了在模型参数不确定和参数变化情况下系统的鲁棒性.文献[10]引入二阶滑模控制的超螺旋算法进行速度控制器设计,并使用基于二阶滑模的鲁棒数字微分器来估计该控制算法所需的加速度信号,理论证明该控制方法可以消除系统抖振.文献[13]提出一种基于自抗扰技术的永磁同步电机速度控制方法,在保留PID控制优势的同时改进了PID控制算法的不足,具有很好的动、静态性能,抗负载扰动能力较强.
相比传统PI/PID控制器以及其他智能控制器,小波控制器具有不依赖系统精确数学模型、能够处理广泛的非线性函数以及基于正交小波和尺度函数的滤波器组结构的优点[11],控制效果更优.文献[12]针对感应电机,提出了基于多分辨自适应的小波—模糊逻辑速度控制器,通过自适应模糊逻辑算法来得到小波分解后不同频率部分的增益系数.文献[14]针对内置式永磁同步电机(Interior Permanent Magnet Synchronous motor,IPMSM),提出了基于小波—神经网络的自适应多分辨率PID速度控制器,相比于传统的PID速度控制器,系统的鲁棒性和响应速度明显提高.
针对永磁同步电机磁场定向矢量控制中的速度控制器,本文提出了基于离散小波变换(Discrete Wavelet Transform,DWT)的速度控制器,并基于模型设计的开发方法,分别建立了基于小波控制器的永磁同步电机驱动系统仿真模型和控制系统代码模型,并结合基于TMS320F2812 DSP的永磁同步电机驱动系统实验平台,进行了基于离散小波变换速度控制器的仿真与实验验证.
全文HTML
-
两相旋转坐标系d-q下,永磁同步电机的电压方程可以表示为
式中:ud为d轴电压;uq为q轴电压;Rs为定子电阻;id为d轴定子电流;iq为q轴定子电流;ψd为d轴磁链;ψq为q轴磁链;ω为电机电角速度;p为微分算子.
由于PMSM的转子磁通为恒值,此时d-q坐标系下磁链方程为
式中:Lsd为定子绕组的d轴电感;Lsq为定子绕组的q轴电感; ψr为转子磁链.
因此,电磁转矩方程和电机运动方程分别为
式中:pn为电机极对数;Te为电磁转矩;J为电机转动惯量;B为阻尼系数;TL为负载转矩.
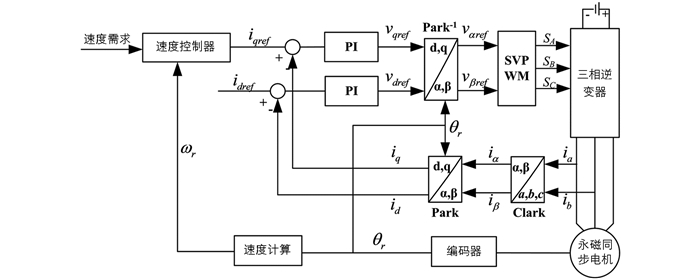
选择id=0的矢量控制解耦方式,永磁同步电机矢量控制基本框图如图 1所示.速度控制器用来调节目标转速与反馈转速之间的误差,产生q轴目标电流iqref. PI电流控制器用来调节d轴目标电流idref=0,q轴目标电流iqref和实际电流(id和iq)之间的误差,并产生d轴目标电压vdref和q轴目标电压vdref,经过反Park变换,得到两相静止坐标系下的目标电压vref和vref,通过电压空间矢量脉宽调制(Space Voltage Vector Pulse Width Modulation,SVPWM)技术,产生3路互补对称的脉宽调变(Pulse Width Modulation,PWM),驱动三相逆变器实现IPMSM控制.
-
信号f(t)的离散小波变换可表示为
式中:ψa,b(t)为离散小波函数;a为离散尺度因子;b为离散平移因子.
为了保证原始信号域与变换域分析的一致性,使得WTf(t)(a,b)能够完整地重构原始信号f(t),采用正交小波分析的方法,得到一个时频定位特性良好的小波函数为
在能量有限空间L2(R)中构成正交基,满足这种特性的ψ(t)便称为正交小波.式中:(j,k)∈Z×Z.
根据多分辨率分析公式,按照标准的正交基,信号f(t)的N级离散小波级数表述可定义为
其中
式(8)、式(9)中:
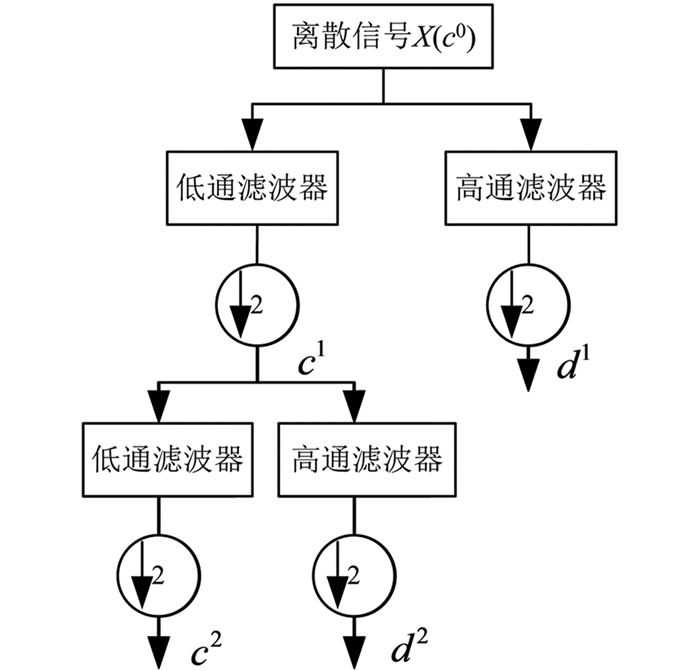
$\overline {\varphi \left( t \right)} $ 和$\overline {\psi \left( t \right)} $ 分别为尺度函数ϕ(t)与小波函数ψ(t)的共轭.离散小波变换可以通过级联的低通滤波器h、高通滤波器g以及下采样来实现.假设长度为N的离散偏差信号x={x[0],x[1],…,x[N-1]}=c0,其离散小波变换两级分解算法如图 2所示.
离散偏差信号经过低通滤波器、高通滤波器以及2下采样操作,得到信号的离散小波变换一级分解近似部分c1与细节部分d1
一级分解的近似信号c1继续通过低通滤波器h、高通滤波器g以及2下采样操作,得到信号的离散小波变换二级分解近似部分c2与细节部分d2
该分解过程一直进行下去,直到达到预定的分解级数.离散信号x经过离散小波变换的S级分解后,得到一组不同频率成分信号且满足
式中:S为正整数,且S=1,2,…log2N;d1为高频信号; di(i=2,3…S)为中频信号;cS为低频信号.
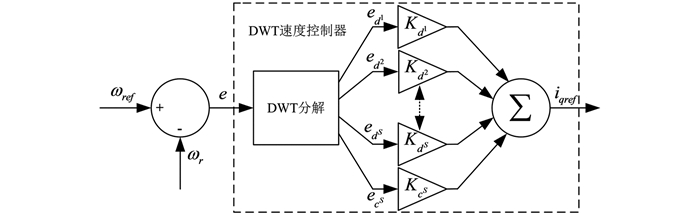
传统的永磁同步电机PID速度控制器中,比例系数KP作用于速度偏差上,积分系数KI作用于速度偏差积分上,微分系数KD作用于速度偏差微分上,分别得到比例偏差、积分偏差和微分偏差.从偏差信号的频率信息看,比例和积分项用来捕获偏差信号的低频信息,而微分项捕获偏差信号的高频信息.对于偏差信号的离散小波变换结果而言,同样得到了偏差信号不同频率段的信息.因此,根据两者频率信息等效原则,如图 3构建基于离散小波变换的速度控制器为
速度控制器输出为
在图 3和式(15)中:ωref为目标速度;ωr为实际速度;e为速度偏差信号;iqref为速度控制器输出;ed1,edi(i=2,3,…,S),eCs分别为高、中、低频偏差信号;Kd1,Kdi(i=2,3,…,S),KCs分别为对应的增益系数.
-
根据香农熵准则,对离散小波变换的最佳分解级数进行选择.离散速度偏差信号x=x[n]={x[0],x[1],…,x[N-1]}的熵定义为
由式(16)计算每一级分解后的信号熵值,当p级分解后的信号熵值H(x)p大于等于信号p-1级分解后的信号熵值H(x)p-1时,即
此时,速度偏差信号的离散小波变换最优分解级数为p-1级.
小波控制器中最佳小波函数的选择取决于应用需求和信号的自身特性[15].根据最小描述长度(Minimum Description Length,MDL)准则,选择最优小波函数和最佳保留分解系数的数目[16].
假设小波函数库为B={B1,B2,…,BM},基于小波函数库中的Bn小波函数,信号f可以表示为
式中:Wn表示列向量为Bn的正交矩阵;αn(k)表示只含有k个非零系数的信号f小波分解系数矢量.
从数据压缩的角度来看,k值应越小越好,然而从减小估计信号与真实信号偏差的角度来看,k值应尽可能大,基于MDL准则能够有效解决这对矛盾,MDL函数定义为
式中:N表示信号的长度;M表示小波函数库中小波函数的总数;k表示信号f的小波分解系数矢量中非零系数的数目;n表示小波函数库中小波函数的编号;αn=WnTf为基于小波函数Bn的信号f的小波分解系数矢量;αn(k)=Θ(k)αn为只含有k个非零系数的信号f的小波分解系数矢量,其中Θ(k)运算表示保留αn中k个绝对值较大的元素,并使得其他元素为0.
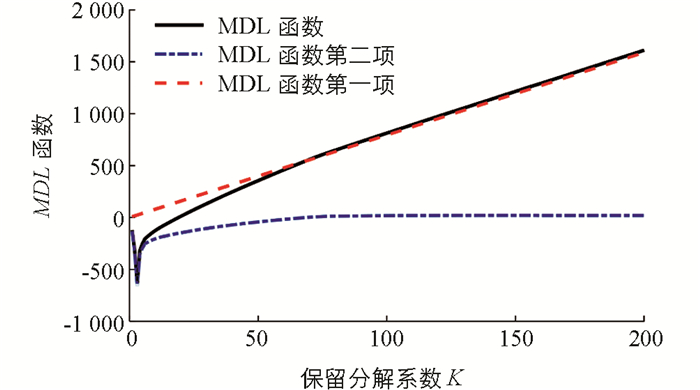
MDL函数的第一项为罚函数,随着保留的小波分解系数k增加而增加,第二项为αn和αn能量差的对数,随着k增加而减小.当MDL数值最小时,即认为当前保留的小波分解系数k最佳,通过对比函数库中不同小波函数的MDL值,即可选择最优的小波函数.
-
基于离散速度偏差信号,构建M=22的小波函数库,包括Daubechies族中10个小波,Coiflets中的5个小波,Symlets中的7个小波.首先根据香农熵准则,对不同小波函数下速度偏差信号的最佳分解级数进行选择,然后基于MDL准则对最优小波函数进行选择.以Coiflets5小波为例,针对离散速度误差信号采用香农熵准则,计算每一级分解后的信号熵,得最佳分解级数为2级.随后,采用MDL函数计算最佳保留分解系数K,MDL函数的结果如图 4所示.由图 4可知,最佳保留分解系数为3,MDL数值为-631.1.
本文针对离散速度偏差信号,选择的最优小波函数为“db4”,分解级数为2级.构建基于离散小波变换的速度控制器输出为
构建的基于离散小波变换速度控制器的内置永磁同步电机驱动系统框图如图 5所示.在电机驱动控制系统中,速度指令和系统干扰属于信号的低频部分,通过增加信号低频部分的增益系数,有助于提高系统的抗干扰能力.增加信号中频部分的增益系数能够增加系统阻尼,有助于提高系统的瞬态和稳态响应.传感器噪声属于高频信号,通过减小信号高频部分的增益系数来减小噪声对系统的干扰.
2.1. 多分辨率分析
2.2. 小波分解级数及小波函数选择
2.3. 速度控制器设计
-
基于当前主流V模型开发方法,采用基于模型设计的方法来实现PMSM空间矢量控制开发.相比于传统手工编写代码的方法,基于模型设计的方法采用统一、交互式、可视化的开发测试平台,能够有效提高系统的开发效率、缩短研发周期、降低产品研发成本[17].基于模型设计方法的核心是系统模型,主要包括需求分析阶段、各功能模块建立阶段以及代码自动生成阶段.
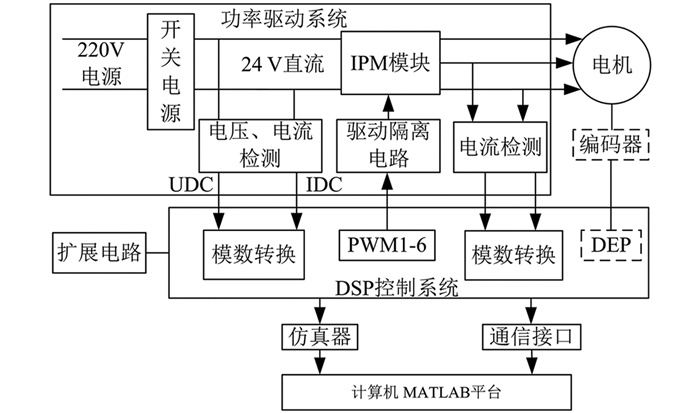
根据基于模型设计的开发方法,最终需要将代码模型生成嵌入式C代码,下载到实际硬件平台中,来检验控制策略的可行性.构建PMSM驱动系统实验平台,如图 6所示为实验平台总体结构,主要包括:
1) 数字信号处理(Digital Signal Processing,DSP)控制系统:采用美国德州仪器公司的TMS320F2812芯片,它是一款定点DSP,主频最高可达150 MHz.
2) 功率驱动系统:功率驱动系统将220 V交流电转化为24 V直流电,PWM信号通过控制三相逆变桥电路实现永磁同步电机驱动控制,同时还需要采集驱动电路的电流和电压信号.
3) 永磁同步电机:选择24 V装有增量式光电编码器的永磁同步电机,光电编码器采样信号传给正交编码脉冲(Quadrature Encoder Pulse,QEP)电路,进行转子位置检测和转速测量,电机参数如表 1所示.
4) 计算机和仿真器:计算机需要正确安装Matlab R2015a和Code Composer Studio 3.3软件,仿真器采用F2812 SEEDXDS 510 USB仿真.
-
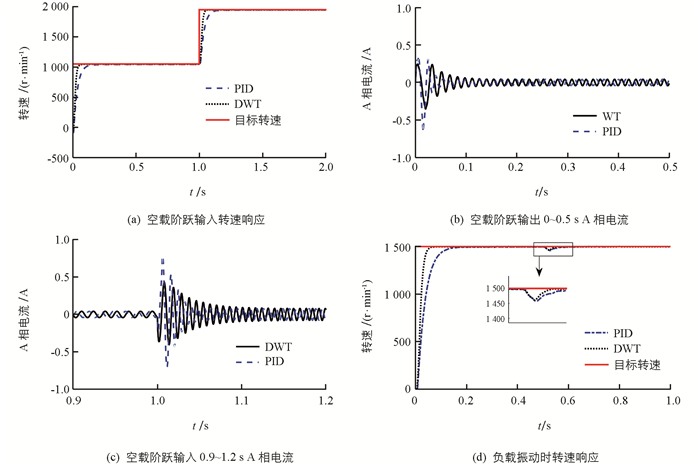
在MATLAB/Simulink中构建基于离散小波变换速度控制器的IPMSM驱动系统仿真模型、基于IPMSM空间矢量控制系统代码模型,根据代码自动生成技术,结合实验室硬件平台,通过IPMSM调速控制试验,验证基于离散小波变换的IPMSM速度控制策略的有效性,同时将基于PID速度控制器的性能仿真作为对比分析.空载时电机转速阶跃变化、负载扰动时永磁同步电机性能仿真曲线分别如图 7所示.
空载时电机转速阶跃变化时电机性能仿真曲线如图 7(a),(b),(c)所示,PID与DWT电机速度控制器的仿真结果对比如表 2所示.结合图 7、表 2可以看出,空载0~1 050 r/min和1 050~1 950 r/min阶跃输入下,与PID速度控制器相比,采用离散小波变换速度控制器的永磁同步电机达到稳态转速的时间更短、速度更快,分别缩短了0.125 s和0.115 s.由图 7(b),(c)永磁同步电机A相电流响应曲线可以看出,采用离散小波变换的速度控制器,超调量较PID速度控制器也更小.
图 7(d)为电机空载启动达到1 500 r/min转速,在0.5 s时,施加40%额定转矩后的转速响应图.结合图 7、表 2可以看出,负载扰动时,PID与DWT速度控制器的转速均发生下降,其中DWT速度控制器转速跌落较小,且能够在较短时间内(0.055 s)恢复到稳态转速,与PID速度控制器相比(0.130 s),恢复到稳态的时间缩短了0.075 s,有效地抑制了负载扰动对系统性能的影响.
以上仿真结果表明,相比于传统PID速度控制器,采用基于离散小波变换的永磁同步电机速度控制器的转速响应快,动态性能好,抗负载扰动能力更强,控制系统的鲁棒性和稳定性更高.
-
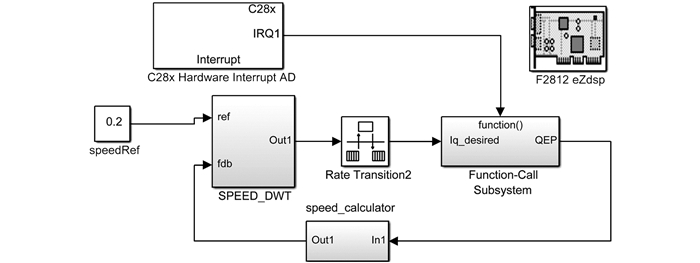
通过联合测试行为组织(Joint Test Action Group,JTAG)仿真器,实时数据交换(Real Time Data Exchange,RTDX)技术搭建起了MATLAB与DSP器件之间数据交换的桥梁,它可以实现在不停止DSP运行的情况下,实时修改DSP运行参数,实时观测DSP运行情况,并且它几乎不占DSP的资源.因此,本文基于RTDX技术构建图形用户界面(Graphical User Interface,GUI)界面,实现目标电机转速给定和电机实时状态显示.构建的PMSM控制系统代码模型如图 8所示,其中电流环模树转换器(Analog to Digital Converter,ADC)采样中断由PWM下溢信号触发,电流环采样时间为0.000 05 s,速度环采样时间为0.005 s.
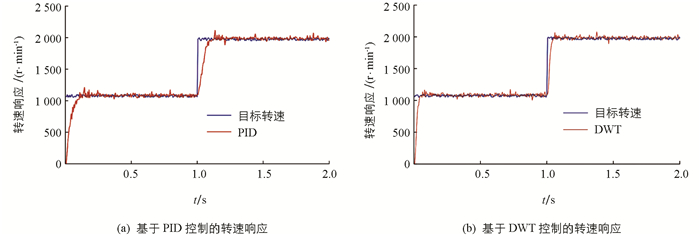
空载时电机转速阶跃变化性能实验结果如图 9所示,PID与DWT电机速度控制器的实验结果对比见表 3.结合图 9、表 3可以看出,在0~1 050 r/min转速阶跃输入下,采用离散小波变换的速度控制器达到稳态转速1 050 r/min的时间(0.085 s)比传统的PID速度控制器(0.205 s)缩短了0.12 s.在1 050 r/min~1 950 r/min转速阶跃输入下,PID速度控制器达到稳态转速1 950 r/min需要1.200 s,而采用离散小波变换的速度控制器只需1.075 s即可达到稳态转速,缩短了0.125 s.由转速响应曲线可以看出,DWT速度控制的稳定性更好,与目标转速的误差更小,控制精度更高.
以上实验结果表明,相比于传统的PID速度控制器,采用离散小波变换速度控制器的永磁同步电机控制精度更高、转速响应更快,具有更优的鲁棒性.
4.1. 仿真分析
4.2. 实验分析
-
1) 本文以永磁同步电机为研究对象,提出了一种基于离散小波变换的永磁同步电机速度控制器,并通过仿真分析和实验验证了基于离散小波变换速度控制器的性能.
2) 本文提出的基于离散小波变换的永磁同步电机速度控制器,能够避免现阶段传统的PID速度控制器因电机模型存在误差造成的系统响应不及时等问题,同时有效地提高了电机控制的精度和鲁棒性,在工程实践中有较强的实用性.