-
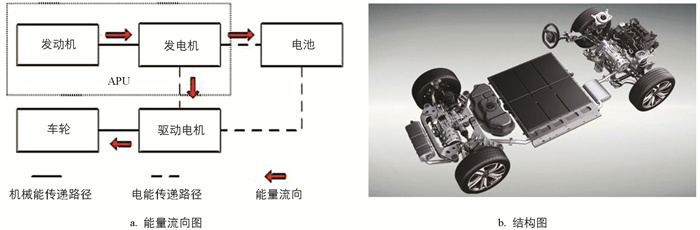
图 1 增程式插电混动汽车结构
-
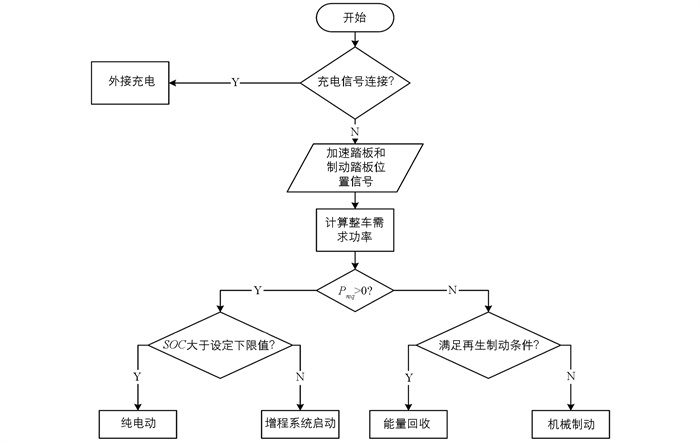
图 2 控制策略流程图
-
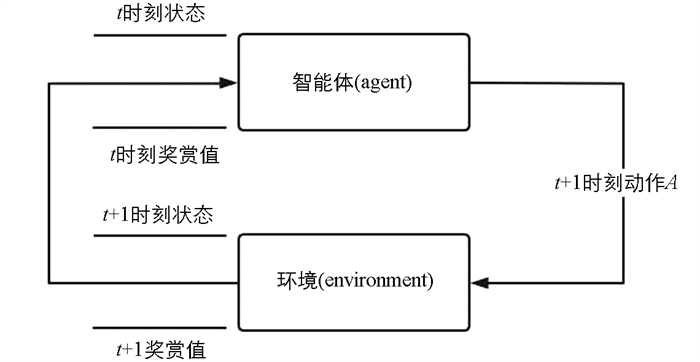
图 3 强化学习结构图
-
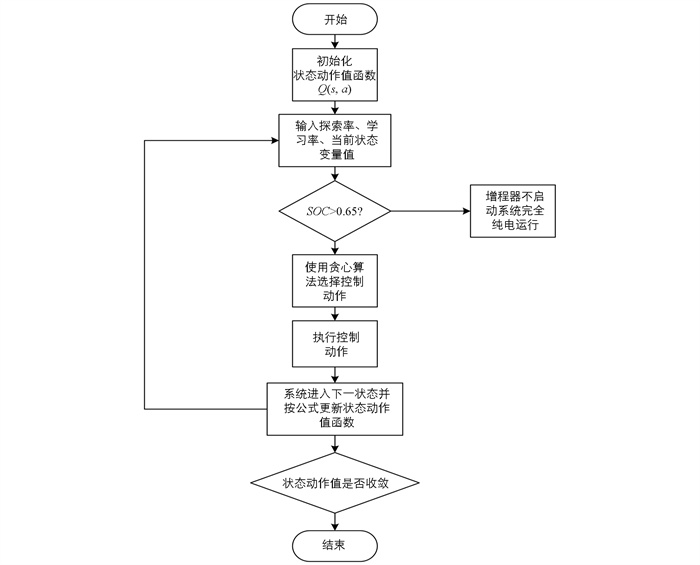
图 4 状态动作值函数更新流程图
-
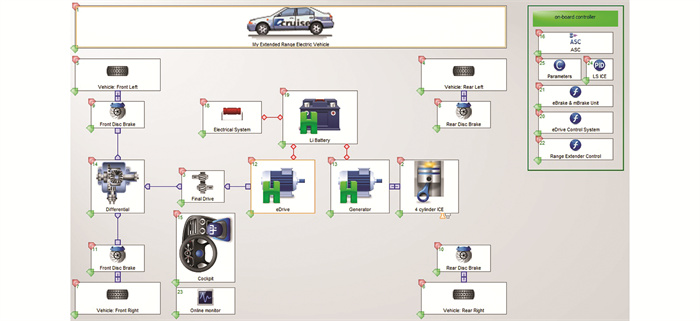
图 5 AVL/Cruise的整车模型图
-
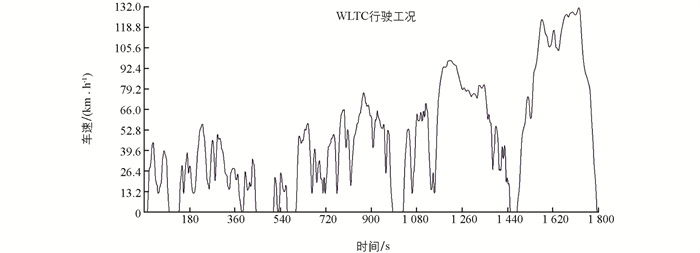
图 6 WLTC循环工况
-
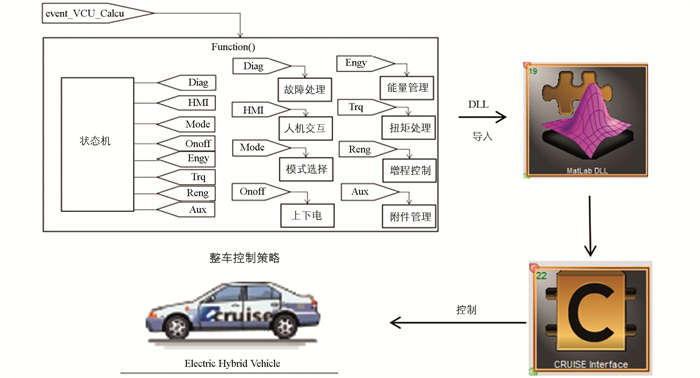
图 7 联合仿真实现
-
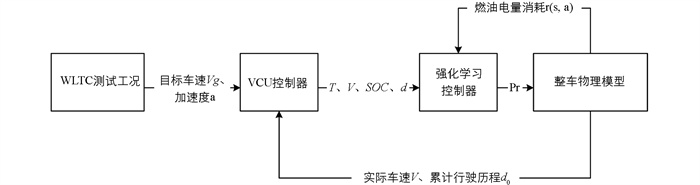
图 8 强化学习策略结构图
-
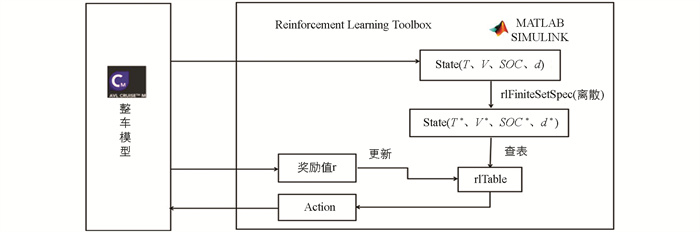
图 9 Q学习迭代过程
-
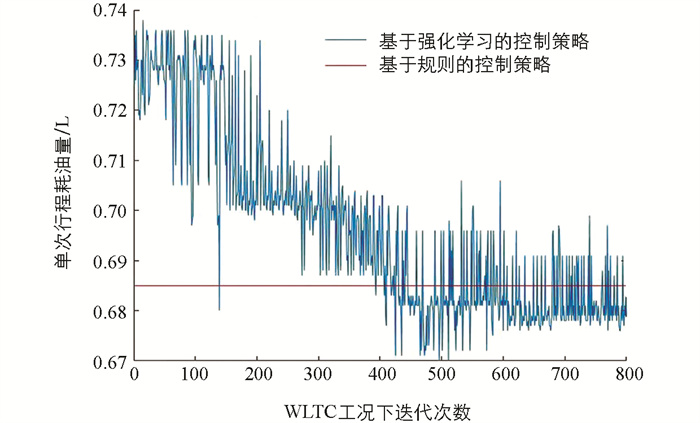
图 10 WLTC工况下仿真迭代次数
-
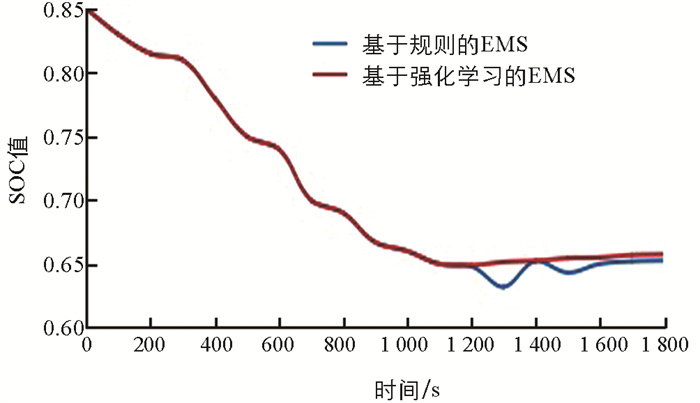
图 11 WLTC工况下两种策略SOC轨迹对比
-
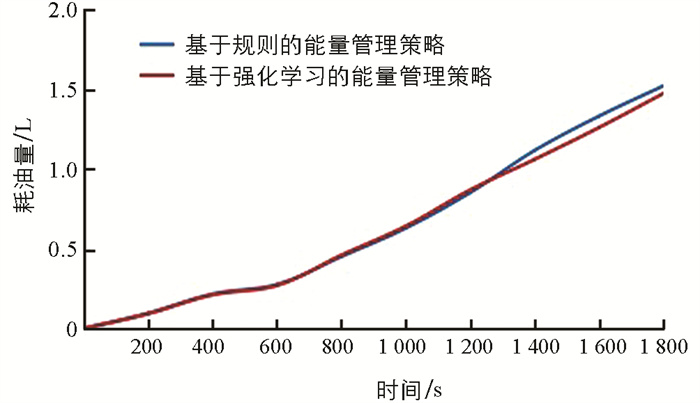
图 12 WLTC循环工况下两种策略综合能耗对比
Figure
12 ,Table
3 个