




-
捕食者-食饵系统是自然界普遍存在的一种生态系统. 各种不同的捕食者-食饵动力学模型已经被提出来研究两个种群之间的相互关系[1]. 特别地,受亚得里亚海各种鱼类种群统计研究的启发,文献[2]提出了如下捕食者-食饵模型
其中:u和v分别表示食饵和捕食者的密度;r1为食饵的增长率;a和c表示捕食行为导致的种间相互作用;r2为正数时,表示捕食者的增长率,捕食者除食饵外还有其他的食物来源,r2为负数时,表示捕食者的死亡率,捕食者只依赖于食饵存活. 文献[3]给出了模型(1)的全局动力学性态,发现当共存平衡解存在时,则必然全局稳定. 考虑到种群的空间异质分布,文献[4]在上述模型的基础上研究了考虑种群随机扩散条件下的反应扩散捕食者-食饵模型,发现其动力学行为和对应的ODE模型(1)类似. 然而除了随机扩散外,许多物种还可能向某个方向定向迁移,如捕食者主动向食饵方向运动以追击猎物等,该类行为被称为趋饵性[5];同时,在某些环境中种群也可能被动地进行定向运动,例如在河流生态系统中被单向流动的水流推动. 近年来对流(如河流)环境下的单种群模型,两种群相互竞争模型的研究已成热点,研究表明对流的引入对系统的动力学行为有重要影响[6-8]. 为了研究对流环境对捕食者-食饵系统动力学行为的影响,本文在模型(1)的基础上考虑如下反应扩散对流模型
其中:u和v分别表示食饵和捕食者的密度;l是栖息地的长度;参数d1,d2为相应的扩散速度,q为对流速度,均为正常数;u0(x)和v0(x)分别表示食饵和捕食者的初始分布. 我们只考虑r2为捕食者的增长率的情况,其他参数的意义与模型(1)中的相同. 假设捕食者只做随机扩散,而食饵除随机扩散外还会朝某一个方向迁移. 这种现象在生态学中是可能存在的,例如捕食者是杂食性陆地动物并且傍河而居,而食饵是河流生物,或者在河流生态系统中,捕食者常居于流速为零的区域(河底)而食饵常居于流速不为零的区域(河面). 由于捕食者只做随机扩散,所以边界条件vx(0)=vx(l)=0表示没有任何捕食者可以通过栖息地的边界. 对于食饵的边界条件,d1ux(0)-qu(0)=0表示对流环境上游不允许食饵通过,d1ux(l)-qu(l)=-bqu(l)表示对流环境下游食饵的损失与对流速度相关,其中b≥0是衡量对流作用导致食饵在下游产生损失数量的测度,详细的推导和生物意义可以参考文献[9].
HTML
-
为了使用抛物型方程的比较原理,我们将系统(2)中食饵的边界条件变为常用的Robin边界条件. 取变换u(x,t)=
${\rm{e}}^{\frac{q}{d_1}x}\tilde u(x, t)$ ,v(x,t)=$\tilde v$ (x,t),将系统(2)转换成如下等价系统易知系统(2)和系统(3)的解结构相同. 不失一般性,我们假设l=1.
首先考虑单物种系统
其中d,q,r>0且b≥0. 当b∈ (0,
$\frac{1}{2}$ ]时,令$\hat q = \sqrt {\frac{dr}{b(1-b)}} $ ;当b∈ ($\frac{1}{2}$ ,+∞)时,令$\hat q = \sqrt {4dr} $ . 对于系统(4)的全局动态,根据文献[6]的定理2.1(b)和文献[10],有如下结论成立.引理1 设d,q,r>0且b≥0. 关于系统(4)有如下结论:
(i) 若b>0,则存在q*=q*(d,r,b)∈(0,
$\hat q$ ),当q∈(0,q*)时,系统(4)存在唯一的正稳态解,记作θ(d,q,r,b),并且是全局稳定的;当q∈[q*,+∞)时,u=0是全局稳定的;(ii) 若b=0,则系统(4)存在唯一的正稳态解θ(d,q,r),并且是全局稳定的.
引理2 设d,q,r>0且b≥0. 若系统(4)的正稳态解θ(d,q,r,b)存在,则θ(d,q,r,b)≤r.
证 首先θ(d,q,r,b)满足如下方程
当b≥1时,由强极大值原理可知θ(d,q,r,b)<r. 现证当0≤b<1时,θ(d,q,r,b)≤r. 令
$\hat θ = \frac{θ_x}{θ} $ ,则当0<b<1时,由强极大值原理,易知(1-b)
$\frac{q}{d}$ <$\hat θ$ <$\frac{q}{d}$ ,并且当b=0时,有$\hat θ$ =$\frac{q}{d}$ . 因为$\hat θ$ ≥(1-b)$\frac{q}{d}$ ,则θx>0,故θ(d,q,r,b)在[0, 1]上单调递增,并在x=1处取得最大值M. 用反证法证明θ(d,q,r,b)≤r,假设M>r,将(5)式的第一个式子在[0, 1]上积分,得显然,总存在x1∈[0, 1],使得θ(x1)=r,并且当x∈[x1,1]时,总有θ(d,q,r,b)≥r. 将(5)式的第一个式子在[x1,1]上积分,得
因为
$\int_{x1}^{1}$ θ(r-θ)dx<0,故-bqθ(1)-dθx(x1)+qθ(x1)>0,移项变换有这与(1-b)
$\frac{q}{d}$ ≤$\hat θ$ 矛盾,假设不成立. 因此当0≤b<1时,θ(d,q,r,b)≤r. 证毕.定理1 设d1,d2,r1,r2>0且b≥0. 系统(2)存在唯一的正解(u,v),并且正解最终有界.
证 首先,根据文献[11],系统(3)的解局部存在且唯一,则系统(2)的解也局部存在且唯一. 其次,由最大值原理,易知u>0,v>0. 故只需证明解的有界性. 结合解的正性和系统(3)的第一个方程可得
根据抛物型方程的比较原理可知
$\tilde u$ (x,t)≤U(x,t),其中U(x,t)满足如下方程通过变换U(x,t)=
${\rm{e}}^{\frac{q}{d_1}x}$ U (x,t),得由引理1,2易知
$\lim\limits_{t→+∞}$ U(x,t)≤r1,故因此,存在正常数ρ,使得0<
$\tilde u$ (x,t)≤ρ. 再根据系统(3)的第二个方程,有类似地,令V (x,t)满足
不难得到
$\lim\limits_{t→+∞}$ V(x,t)=r2+c${\rm{e}}^{\frac{q}{d_1}x}$ ρ,由比较原理有因为系统(2)和等价系统(3)的解结构相同,所以系统(2)的解(u,v)最终有界. 证毕.
-
易见系统(2)可能存在3个边界平衡态解(0,0),(θ(d1,q,r1,b),0)和(0,r2). 为了研究这些平衡解的稳定性,我们首先证明如下结论.
定理2 设d1,d2,r1,r2>0且b≥0. 若(u,v)是系统(2)的解,则
$\liminf \limits_{t \rightarrow+\infty}$ v(x,t)≥r2.证 由系统(2)的第二个方程有
由比较原理易得
$\liminf\limits_{t→+∞}$ v(x,t)≥r2. 证毕.定理2表明平衡点(0,0)和(θ(d1,q,r1,b),0)一定是不稳定的,下面来讨论(0,r2)的稳定性. 考察特征值问题
其中:d,q>0,b≥0且r∈
${\mathbb{R}}$ . 根据Krein-Rutman定理[15]知问题(8)存在主特征值λ1(d,q,r,b),且对应的有严格正的特征函数ϕ1(d,q,r,b). 结合系统(4)中的设定,根据文献[6]的引理2.1,2.2和文献[12]的命题3.1,有下列结论成立.引理3 设d,q>0,b≥0且r∈
${\mathbb{R}}$ . 特征值问题(8)有如下性质:(i) 若d,r,b>0,则存在q*=q*(d,r,b)∈(0,
$\hat q$ ),当q∈(0,q*)时,λ1(d,q,r,b)>0,当q=q*时,λ1(d,q,r,b)=0,当q∈(q*,+∞)时,λ1(d,q,r,b)<0;(ii) 若r≤0,则λ1(d,q,r,b)≤0,并且b=0时,λ1(d,q,r,0)=r.
定理3 设d1,d2,r1,r2,q>0且b≥0. 平衡解(0,r2)的局部稳定性情况如下:
(H1) 当r1>ar2时,若b>0,则存在q*(d1,r1-ar2,b),使得q∈(0,q*(d1,r1-ar2,b)),(0,r2)是不稳定的,q∈(q*(d1,r1-ar2,b),+∞),(0,r2)是局部渐进稳定的;
(H2) 当r1>ar2时,若b=0,则(0,r2)是不稳定的;
(H3) 当r1<ar2时,(0,r2)是局部渐进稳定的.
证 系统(2)在(0,r2)处线性化后的特征值问题如下
定义Λ为特征值问题(9)的谱,显然Λ=Λ{φ=0}∪Λ{φ≠0}. 当φ=0时,考察特征值问题
可取特征函数ψ1(x)=1,故主特征值λ1=-r2<0. 因此,对属于特征值问题(10)的特征值λ,都有Re λ<λ1<0,则sup{Re λ,λ∈Λ{φ=0}}<0. 当φ≠0时,考察特征值问题
定义σ
$\left[d_\text{1} \frac{d^\text{2}} {dx^\text{2}} -q \frac{d} {dx} +r_\text{1}-ar_\text{2}\right]$ 为算子$d_{1} \frac{d^{2}}{d x^{2}}-q \frac{d}{d x}+r_{1}-a r_{2}$ 的谱,则根据引理3,当r1>ar2时,若b>0,则存在q*(d1,r1-ar2,b),使得q∈(0,q*(d1,r1-ar2,b)),λ1(d1,q,r1-ar2,b)>0,则
所以(0,r2)是不稳定的,q∈(q*(d1,r1-ar2,b),+∞),λ1(d1,q,r1-ar2,b)<0,则
所以(0,r2)是局部渐进稳定的,(H1)成立. 类似地,当r1>ar2时,若b=0,由引理3,可知λ1(d1,q,r1-ar2,b)=r1-ar2>0,(0,r2)是不稳定的,(H2)成立. 当r1<ar2时,由引理3,可知λ1(d1,q,r1-ar2,b)<0,同样可得(0,r2)是局部渐进稳定的,(H3)成立. 证毕.
由定理3可知(0,r2)的局部稳定性,下面证明若(0,r2)是局部稳定的,则(0,r2)是全局吸引的,从而(0,r2)也是全局稳定的.
定理4 设d1,d2,r1,r2,q>0且b≥0. 若条件
(C1) r1<ar2.
(C2) r1>ar2,b>0,q∈(q*(d1,r1-ar2,b),+∞).
之一成立,则平衡解(0,r2)是全局稳定的.
证 由定理2有
故对∀ε>0,存在T>0,使得当t≥T时,有
$\tilde v$ (x,t)≥r2-ε. 结合系统(3)的第一个方程,有现考虑如下方程
由比较原理,可知当t≥T时,
$\tilde u$ (x,t)≤U (x,t). 通过变换U(x,t)=$\mathrm{e}^{\frac{q}{d_1} x}$ U(x,t),得当(C1)成立时,取ε足够小,使得r1+aε-ar2<0,再由引理3得λ1(d1,q,r1+aε-ar2,b)<0. 根据文献[10],系统(12)的解U=0是全局稳定的当且仅当λ1(d1,q,r1+aε-ar2,b)<0,则
当(C2)成立时,有r1+aε-ar2>r1-ar2>0,由引理1可知存在q*(d1,r1+aε-ar2,b),使得当q∈[q*(d1,r1+aε-ar2,b),+∞)时,系统(12)的解U=0是全局稳定. 又因为(C2)成立时,有q∈(q*(d1,r1-ar2,b),+∞),并且ε是任意小的正常数,所以必有q∈[q*(d1,r1+aε-ar2,b),+∞),故
综上所述,若(C1)和(C2)其中一个成立,则对∀ε1>0,总存在T1>0,使得当t≥T1时,有
$\tilde u$ (x,t)≤ε1. 结合系统(3)的第二个方程,当t≥T1时,有由比较原理易得
再结合(11)式和(13)式,有
可知(0,r2)是全局吸引的,又因(0,r2)的局部稳定性已知,所以结论成立.
-
在这一节中,我们使用一致持续性理论来研究系统(2)的一致持续性条件,相关理论的详细介绍可以参考文献[13].
定理5 设d1,d2,r1,r2,b>0且r1>ar2. 若q∈(0,q*(d1,r1-ar2,b)),则系统(2)是一致持续的,即存在一个正常数η,使得
证 定义P={(
$\tilde u, \tilde v$ )∈C[0, 1]×C[0, 1]:$\tilde u$ ≥0,$\tilde v$ ≥0},P0={($\tilde u, \tilde v$ )∈P:$\tilde u$ (x)$\not \equiv$ 0,$\tilde v$ (x)$\not \equiv$ 0},∂P0=P-P0;定义Θ(t)为系统(3)在空间P中解的半流. 由强极大值原理可知当($\tilde u$ 0,$\tilde v$ 0)∈P0时,系统(3)的解($\tilde u$ (x,t),$\tilde v$ (x,t))满足$\tilde u$ (x,t)>0,$\tilde v$ (x,t)>0,故P0是P中的开集并且还是正向不变集. 显然,∂P0包含(0,0),($\mathrm{e}^{\frac{q}{d 1} x}$ θ(d1,q,r1,b),0)和(0,r2);定义M∂={($\tilde u$ 0,$\tilde v$ 0)∈∂P0:Θ(t)($\tilde u$ 0,$\tilde v$ 0)∈∂P0,∀t≥0},γ(($\tilde u$ 0,$\tilde v$ 0))是正向轨{Θ(t)($\tilde u$ 0,$\tilde v$ 0):t≥0}的极限集. 具体证明过程分为如下4步:1) 证明
$\bigcup\limits_{\left(\tilde{u}_{0}, \tilde{v}_{0}\right)\in M _\partial} \gamma\left(\left(\tilde{u}_{0}, \widetilde{v}_{0}\right)\right)$ ={(0,0),($\mathrm{e}^{\frac{q}{d 1} x}$ θ(d1,q,r1,b),0),(0,r2)}.如上所述,对∀(
$\tilde u$ 0,$\tilde v$ 0)∈M∂,有Θ(t)($\tilde u$ 0,$\tilde v$ 0)∈∂P0,即对∀t≥0,有$\tilde u$ (x,t,($\tilde u$ 0,$\tilde v$ 0))≡0或$\tilde v$ (x,t,($\tilde u$ 0,$\tilde v$ 0))≡0. 当$\tilde u$ (x,t,($\tilde u$ 0,$\tilde v$ 0))≡0时,考虑如下方程易知
$\lim\limits _{t \rightarrow+\infty} \widetilde{v}(x, t)$ =r2. 当$\tilde v$ ≡0时,考虑如下方程由引理1得
$\lim\limits _{t \rightarrow+\infty} \tilde{u}(x, t)=\mathrm{e}^{-\frac{q}{d 1} x}$ θ(d1,q,r1,b)或$\lim\limits _{t \rightarrow+\infty} \tilde{u}(x, t)$ =0. 证毕.2) 证明(0,0)是一个一致弱的排斥子,即对∀(
$\tilde u$ 0,$\tilde v$ 0)∈P0,存在常数σ1>0,使得使用反证法,假设(14)式不成立,则对∀σ>0,存在一个(
$\tilde u$ 0,$\tilde v$ 0)∈P0,使得$\limsup\limits_{t \rightarrow+\infty} $ ‖Θ(t)(($\tilde u$ 0,$\tilde v$ 0))-(0,0)‖<σ,故存在t1>0,使得对∀t≥t1,有‖$\tilde u$ (x,t,($\tilde u$ 0,$\tilde v$ 0))‖<σ,‖$\tilde v$ (x,t,($\tilde u$ 0,$\tilde v$ 0))‖<σ. 结合系统(3)的第二个方程,有因为(
$\tilde u$ 0,$\tilde v$ 0)∈P0,由最大值原理,可知$\tilde v$ (x,t1)>0. 令v (x,t)是下列方程的解这里的α<
$\tilde v$ (x,t1). 根据比较原理,当t≥t1时,$\tilde v$ (x,t)≥v(x,t). 很明显v (x,t)=$\alpha {\rm{e}}^{(r1-\sigma)(t-t1)}$ 是方程(15)的解. 使σ足够小以至于r1-σ>0,则$\lim\limits_{t→+∞}\tilde v$ (x,t,($\tilde u$ 0,$\tilde v$ 0))=+∞,这与假设矛盾. 因此,假设不成立,{(0,0)}是P中孤立的不变集. 另外,通过类似的推导,可以证得{(${\rm{e}}^{-\frac{q}{d_1}x}$ θ(d1,q,r1,b),0)}是P中孤立的不变集,这里不再赘述.3) 证明(0,r2)是一致弱的排斥子,即对∀(
$\tilde u$ 0,$\tilde v$ 0)∈P0,存在常数σ2>0,使得使用反证法,假设(16)式不成立,则对∀σ>0,存在一个(
$\tilde u$ 0,$\tilde v$ 0)∈P0,使得$\limsup\limits _{t \rightarrow+\infty}$ ‖Θ(t)(($\tilde u$ 0,$\tilde v$ 0))-(0,r2)‖<σ,故存在t2>0,使得对∀t≥t2,有‖$\tilde u$ (x,t,($\tilde u$ 0,$\tilde v$ 0))‖<σ,‖$\tilde v$ (x,t,($\tilde u$ 0,$\tilde v$ 0))-r2‖<σ. 易知对∀t≥t2,系统(2)的解(u(x,t),v(x,t))满足‖u(x,t,(u0,v0))‖<${\rm{e}}^{\frac{q}{d_1}}$ σ,‖v(x,t,(u0,v0))-r2‖<σ. 结合系统(2)的第一个方程,有使用合适的变量替换,再由比较原理可得对∀t≥t2,有u(x,t)≥u (x,t). 其中,u (x,t)满足如下方程
定义μ1σ=λ1(d1,q,r1-ar2-aσ-
${\rm{e}}^{\frac{q}{d_1}}$ σ,b),并且对应的特征函数为ω1(x)>0. 令u满足如下方程易知u (x,t)=α1eμ1σ(t-t2)ω1(x)是方程(18)的解. 其中,α1>0并且满足u(x,t2)≥α1ω1(x),故对∀t≥t2,有
因为q∈(0,q*(d1,r1-ar2,b)),λ1(d1,q,r1-ar2,b)>0. 让σ足够小,使得μ1σ=λ1(d1,q,r1-ar2-aσ-
${\rm{e}}^{\frac{q}{d_1}}$ σ,b)>0,则$\lim\limits_{t→+∞}$ u(x,t)=+∞,这与假设矛盾. 因此,假设不成立,{(0,r2)}是P中孤立的不变集.4) 定义连续函数D:P→ [0,+∞),对∀(
$\tilde u$ ,$\tilde v$ )∈P由比较原理可知D-1(0,+∞)⊆P0. 当D((
$\tilde u$ ,$\tilde v$ ))>0或者($\tilde u$ ,$\tilde v$ )∈P0且D(($\tilde u$ ,$\tilde v$ ))=0时,有D(Θ(t)($\tilde u$ ,$\tilde v$ ))>0. 根据文献[13],称D是半流Θ(t):P→P的一个距离函数.由定理1,可知Θ(t):P→P是点耗散的,又由于扩散算子的光滑性,易知半流Θ(t):P→P是紧的. 根据文献[14]的定理2.6,Θ(t)存在一个全局的吸引子,吸引P中任意一个有界集. 因为(0,0),(
${\rm{e}}^{-\frac{q}{d_1}x}$ θ(d1,q,r1,b),0)和(0,r2)是一致弱的排斥子,并且它们在P中是孤立的,即WS((
${\rm{e}}^{-\frac{q}{d_1}x}$ θ(d1,q,r1,b),0)),WS((0,0))和WS((0,r2))是对应于(${\rm{e}}^{-\frac{q}{d_1}x}$ θ(d1,q,r1,b),0),(0,0)和(0,r2)的稳定集. 因此,{(0,0)∪(${\rm{e}}^{-\frac{q}{d_1}x}$ θ(d1,q,r1,b),0)∪(0,r2)}的子集不能在∂P0中形成环. 根据文献[13]的定理3,总存在正常数η,使得对∀($\tilde u$ 0,$\tilde v$ 0)∈P0,有因此对∀(
$\tilde u$ 0,$\tilde v$ 0)∈P0,存在一个正常数η使得$\liminf\limits _{t \rightarrow+\infty}$ u(x,t)≥η,$\liminf \limits_{t \rightarrow+\infty}$ v(x,t)≥η,结论成立. 证毕.类似地,可以使用一致持续性理论得到系统(2)在b=0时的一致持续性,证明省略.
定理6 设d1,d2,r1,r2,q>0且r1>ar2. 若b=0,则系统(2)是一致持续的,即存在正常数η,使得
-
本节首先通过数值模拟验证我们的理论研究结果. 取定参数
(I) d1=0.15,d2=0.1,r1=4,r2=3,a=0.5,c=0.2,l=10.
此时r1>ar2,当b=0时,由图 1(a)可知,系统对任意的q>0都是一致持续的,该结果与定理6相符;当b=1时,由图 1(b)可知,存在一个临界的流速,使得当流速小于此临界值时,系统是一致持续的,当流速大于此临界值时,捕食者种群平均密度是3,食饵种群将会灭绝,该结果与定理4和定理5相符.
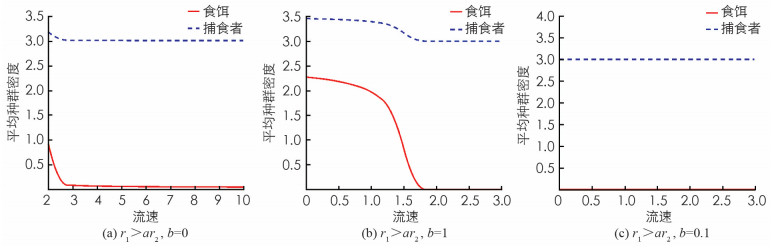
(II) d1=0.15,d2=0.1,r1=1,r2=3,a=0.5,c=0.2,l=10.
此时r1>ar2,由图 1(c)可知,对任意的q>0和b=0.1,捕食者种群平均密度总是3,食饵种群总会灭绝,该结果与定理4相符.
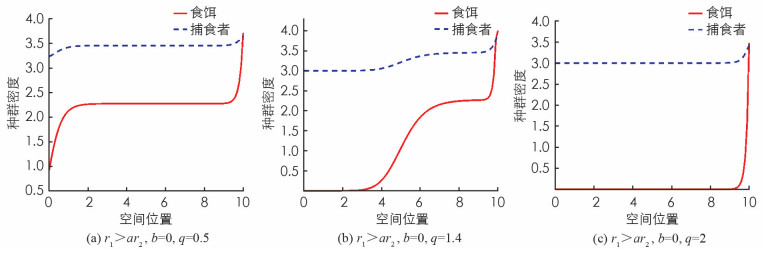
其次,我们通过数值模拟研究了不同流速对种群空间分布的影响. 选择参数组(I),当b=0时,种群是一致持续的. 但由图 2可知,随着流速变大,种群的空间分布会发生变化,且随着流速增加食饵种群会聚集在河流的下游,由于可用资源减少,使得种群总的数量降低,因此对流的增加不利于种群的繁衍.
 DownLoad:
DownLoad: