




-
近年来,许多学者都非常关注海洋沉积物中生物化学反应现象的研究. 为探究出系统的一些典型动力学行为,文献[1]提出了关于海洋沉积物的如下营养-微生物模型:
其中B和N分别表示细菌和营养物的生物量浓度;α表示生物量转化速率;m是死亡率;L是半饱和系数;β是捕获率;Φ表示沉积物与海水之间的导水率;
$\hat{N}$ 表示N在外部海水中的浓度;模型中所有参数均为正数. 关于系统(1)的更多生物学意义可参见文献[1-3].为了书写方便,作无量纲变换,令
得到简化后的系统
其中u和v分别表示细菌和营养物的生物量浓度. 对系统(2)加入扩散项后考虑如下反应扩散模型:
其中Ω⊂
$\mathbb{R}$ N(N≥1)为具有光滑边界$\partial$ Ω的有界开集;ν是$\partial$ Ω上的单位外法向量;Δ是拉普拉斯算子;d1和d2分别表示细菌和营养物的扩散系数,均为正常数;且系数$a=\frac{m}{\varPhi}$ .对于系统(3),文献[1]主要研究了其Turing模式,发现由于Turing不稳定导致物种的异质分布现象,找到了非平凡平衡点失稳的条件;文献[2]利用空间分解定理和隐函数定理研究了系统(3)的稳态分支,并详细讨论了Hopf分支的存在性与稳定性;文献[3]研究了Turing不稳定性、非常数稳态解的存在性,并利用分支理论研究了系统(3)的局部和全局分支结构.
为了反映出系统的动力学行为不仅受当前状态的影响,还依赖于过去某一时刻的状态,众多学者围绕时滞微分方程进行了研究,取得了许多丰富且有意义的成果[4-12]. 例如,文献[4]研究了时滞效应对一类具有HollingⅡ功能反应的捕食食饵模型的影响,结果表明,当时滞参数较大时,系统会表现出稳定的振荡行为;文献[5]的研究结果显示,当系统经过某些稳定性开关后,平衡点会由稳定变成不稳定,并且当时滞参数取某些临界值时,系统会产生Hopf分支;文献[6]证明了系统的正平衡点在时滞小于某个临界值时是稳定的,而当时滞超过该临界值时,正平衡点变得不稳定;文献[7]在给模型引入两个不同时滞的条件下,研究了系统唯一正平衡点的稳定性和Hopf分支的存在性;文献[8]考虑了在Dirichlet边界条件下时滞效应对一类种群模型的影响;文献[9]建立了一个Wolbachia在蚊子种群中的传播模型,研究了时滞对Wolbachia传播的影响;文献[10]利用Mawhin连续定理和微分不等式研究了一类带有离散型时滞的Lotka-Volterra食饵-捕食者模型存在8个正周期解的问题;对于肿瘤-免疫动力学模型,文献[11]研究了免疫激发分布时滞对系统动力学性态的影响,文献[12]则发现分布时滞的引入可能导致系统产生周期振荡现象,进而解释肿瘤的复发现象.
文献[13]在系统(3)的基础上考虑给反应过程中的营养物生物量浓度引入时滞,研究了系统的许多动力学行为,例如平衡点的稳定性、Turing不稳定性、Hopf分支以及Hopf-Hopf分支.
事实上,在细菌和营养物这两类物种互相作用的过程中,时滞效应的存在会影响细菌和营养物的生物量浓度变化. 因此,基于上述分析,本文在系统(3)的基础上考虑如下模型:
其中,时滞τ代表细菌的成熟期,指细菌进入环境后需经历τ单位的时间才能达到成熟进而完成繁殖增长. 对于系统(4),本文分别对常微分系统和偏微分系统研究了时滞对正常数平衡点稳定性的影响,以及在正常数平衡点处Hopf分支产生的条件,并计算了分支周期解的稳定性和分支方向. 结果表明,当时滞τ在经过某一临界值时,系统会由稳定状态变为不稳定状态,并产生Hopf分支. 文中分别用
$\mathbb{N}$ +和$\mathbb{R}$ +表示非负整数集和正实数集.本文的结构如下. 第一部分主要讨论带时滞参数的常微分系统和偏微分系统正常数平衡点的稳定性以及Hopf分支的存在性. 第二部分讨论Hopf分支的方向和分支周期解的稳定性. 第三部分进行数值模拟,验证结论.
HTML
-
本节考虑如下带有时滞参数的常微分系统:
易知系统(5)存在正常数平衡点(u*,v*)的充要条件为(u*)2+(1-b)u*+K=0,因此可知:
若
$b<1+2 \sqrt{K}$ ,则系统(5)不存在正常数平衡点;若
$b=1+2 \sqrt{K}$ ,则系统(5)存在1个正常数平衡点$\left(u_0^*, v_0^*\right)=(\sqrt{K}, 1+\sqrt{K})$ ;若
$b>1+2 \sqrt{K}$ ,则系统(5)存在2个正常数平衡点(u1*,v1*)和(u2*,v2*),其中根据文献[2]可知,当τ=0,且系统(5)满足条件
时,正常数平衡点(u1*,v1*)是局部渐近稳定的,下面讨论时滞τ≠0对系统(5)的正常数平衡点(u1*,v1*)稳定性的影响. 定义(u*,v*)=(u1*,v1*).
令
$\hat{u}=u-u^*, \hat{v}=v-v^*$ ,为了方便起见,系统(5)可化为其中
根据Taylor展开式,系统(6)在(0,0)处的线性化系统是
系统(7)的特征方程为
其中
若λ=iω(ω>0)是特征方程(8)的纯虚根,将其代入,可得
则有
其中
假设C02-B2 < 0成立,则方程(10)存在正根ω0,满足
将ω0代入(9)式,计算可得
下面验证横截条件. 令
对其积分后代入ω=ω0,可得
因此,当ω=ω0时横截条件成立,可得定理1:
定理1 设
$b>1+2 \sqrt{K}, 0<a<\frac{\left(u^*\right)^2+u^*+K}{K}, C_0^2-B^2<0$ ,则有:(ⅰ) 若τ < τ00,则系统(5)的正常数平衡点(u*,v*)局部渐近稳定;
(ⅱ) 若τ=τ0j(j∈
$\mathbb{N}$ +),则系统(5)在正常数平衡点(u*,v*)处产生Hopf分支;(ⅲ) 若τ>τ00,则系统(5)的正常数平衡点(u*,v*)不稳定.
-
本节研究如下带有时滞参数的偏微分系统,为了简化后期计算和着重探讨时滞因素对系统稳定性的影响,此时考虑空间域Ω=(0,lπ)的一维简单情形,其中l∈
$\mathbb{R}$ +:与1.1节类似,对系统(13)在平衡点(u*,v*)处做平移变换后,可以写成下面的抽象微分方程形式:
其中定义X=C([0,lπ],
$\mathbb{R}$ 2),dΔ=(d1Δ,d2Δ),以及已知
对于ϕ=(ϕ1,ϕ2)T∈C([-τ,0],X),有
以及
则系统(14)在(0,0)处附近的线性化系统为
线性系统(15)的特征方程等价于
根据特征值问题-ψ″=μψ,其中x∈(0,lπ),ψ′(0)=ψ′(lπ)=0,可得特征值
$\mu_n=\frac{n^2}{l^2}(n=0, 1, 2, \cdots)$ 以及对应的特征函数$\psi_n(x)=\cos \frac{n}{l} x$ . 将$\boldsymbol{y}=\sum\limits_{n=0}^{\infty} \cos \frac{n}{l} x\left(\begin{array}{l} y_{1 n} \\ y_{2 n} \end{array}\right)$ 代入特征方程(16),得到因此,方程(16)的所有特征根由以下特征方程给出:
其中
若λ=±iω(ω>0)是特征方程(17)的一对纯虚根,则有
化简可得
其中
假设C02-B2 < 0成立. 由于
$\lim\limits_{n \rightarrow \infty}\left(C_n^2-B^2\right)=+\infty$ ,则存在最小的N0≥0,使得:当n>N0时,方程(19)没有正根;当0≤n≤N0时,方程(19)至多有1个正根. 此外,假设d2≥d1,则An2-2Cn>0总是成立.对于0≤n≤N0,方程(19)有正根ωn,满足
因此,可以确定τ的表达式为
其中
故此时方程(17)存在一对纯虚特征根±iωn.
引理1 令λn(τ)=αn(τ)+iωn(τ)是方程(17)的根,当τ趋近于τnj时,满足αn(τnj)=0和ωn(τnj)=ωn,则有横截条件成立,即当0≤n≤N0和j∈
$\mathbb{N}$ +时,有$\left.\frac{\mathrm{d} \alpha_n}{\mathrm{~d} \tau}\right|_{\tau=\tau_n^j}>0$ 成立.证 对特征方程(17)两边同时关于τ求导,则有
将τ=τnj代入(25)式,可得
由于
以及
故由(26)式,有
因此横截条件成立. 证毕.
根据(23)式易得τnj+1>τnj. 接下来给出τnj关于n的单调性.
引理2 若
$d_2 \geqslant d_1, b>1+2 \sqrt{K}, 0<a<\frac{\left(u^*\right)^2+u^*+K}{K}$ ,则存在正整数M>0,使得当M≤n≤N0,j∈$\mathbb{N}$ +时,有τn+1j>τnj成立.证 由(22)式变形,可得
其中An2-2Cn和Cn2-B2由(20),(21)式给出. 经计算可知,由于d2≥d1,所以An2-2Cn关于n是严格递增的,并且存在正整数M>0,使得当M≤n≤N0时,B2-Cn2关于n是严格递减的,因此可得ωn+12 < ωn2. 又因为
即有
故有An>0,再根据(24)式得
$\tau_n^0=\frac{1}{\omega_n} \arccos \frac{\omega_n^2-C_n}{B}$ ,因此当M≤n≤N0时,有τn+10>τn0. 又因为ωn+1 < ωn,则由(23)式可知τn+1j>τnj,其中M≤n≤N0,j∈$\mathbb{N}$ +. 证毕.由引理2可知分支值序列{τnj}中最小的分支值是τ00. 因此可以得到定理2:
定理2 设
$d_2 \geqslant d_1, b>1+2 \sqrt{K}, 0<a<\frac{\left(u^*\right)^2+u^*+K}{K}$ ,则有:(ⅰ) 若τ∈[0,τ00),则系统(13)的正常数平衡点(u*,v*)局部渐近稳定;
(ⅱ) 若τ∈(τ00,∞),则系统(13)的正常数平衡点(u*,v*)不稳定;
(ⅲ) 若τ=τnj(0≤n≤N0,j∈
$\mathbb{N}$ +),则系统(13)在正常数平衡点(u*,v*)处产生Hopf分支.
1.1. 带时滞的常微分系统
1.2. 带时滞的偏微分系统
-
本节主要利用时滞偏微分方程的中心流形定理(见文献[14])和规范型理论(见文献[15-16])研究当τ=τ0≡τ00时Hopf分支的方向和分支周期解的稳定性. 令τ=τ0+μ,将
$t=\tau \tilde{t}$ 代入方程(14),且依旧用t表示$\tilde{t}$ ,则方程(14)改写为其中对于ϕ∈C([-1,0],X),有
系统(14)在(0,0)处的线性化系统是
由第二节知,±iω0τ0是线性化系统(28)的一对纯虚特征值. 根据Riesz表示定理,存在一个2×2的有界变差函数矩阵η(θ,μ)(θ∈[-1,0]),满足以下形式:
其中
且对于δ(θ):[-1,0] (X,X),有
接下来定义算子A(0)和A*分别为
其中ϕ(θ)∈C1([-1,0],
$\mathbb{R}$ 2),ψ(s)∈C1([0, 1],($\mathbb{R}$ 2)*).对于u=(u1,u2),v=(v1,v2)∈X=C([0,lπ],
$\mathbb{R}$ 2),定义内积为此外,对于ϕ(θ)∈C1([-1,0],
$\mathbb{R}$ 2)和ψ(s)∈C1([0, 1],($\mathbb{R}$ 2)*),引入如下双线性型内积:经验证可知,±iω0τ0是算子A(0)和A*的特征值,设q(θ)是算子A(0)关于特征值iω0τ0的特征向量,q*(s)是算子A*关于特征值-iω0τ0的特征向量,则根据算子A(0)和A*的定义可得,q(θ)和q*(s)的形式分别为
和
再根据(30)式,计算可得
由于q(θ)和q*(s)满足〈q* (s),q(θ)〉0=1和〈q* (s),q(θ)〉0=0,则有
令系统(28)的中心子空间是Y={(zq(θ)+zq(θ)):z∈
$\mathbb{C}$ }. 在系统(27)中设μ=0,可确定一个中心流形为设Φ=(q(θ),q(θ)),Ψ=(q*(s),q*(s))T,且系统(27)在中心流形中的流可以写为
再根据内积公式可得〈ϕ,f0〉=(〈ϕ,f01〉,〈ϕ,f02〉)T,其中ϕ∈C([-1,0],X),f0=(f01,f02)T,f01=
$\left(\begin{array}{l} 1 \\ 0 \end{array}\right), \boldsymbol{f}_0^2=\left(\begin{array}{l} 0 \\ 1 \end{array}\right)$ . 因此,当μ=0时,有其中
根据G(ϕ,μ)的表达式可知G(ϕ,0)=τ0F0(ϕ)=τ0(G1,G2)T,其中
其中O(4)=O(‖(u,v)‖4).
由(32)-(34)式可得
为了得到g21的值,需计算W20(θ)和W11(θ). 由于W(z(t),z(t))满足
其中
I为单位矩阵,通过链式法则
可得
当θ∈[-1,0)时,由(35)式可得
则有
结合(36)和(37)式得到如下微分方程
可得方程(38)的解为
当θ=0时,由(36)式和
可得
其中
基于上述分析,可以计算出如下用于判断Hopf分支方向和分支周期解稳定性的值:
由此可得出定理3:
定理3 对于系统(13),有如下结论:
(ⅰ) μ2确定Hopf分支的方向,当μ2>0(μ2 < 0)时,分支方向是超临界的(次临界的);
(ⅱ) β2确定分支周期解的稳定性,当β2 < 0时,分支周期解是渐近稳定的,当β2>0时,分支周期解是不稳定的;
(ⅲ) T2确定分支周期解的周期,当T2>0时,周期增大,当T2 < 0时,周期减少.
-
本节利用MATLAB软件给出具体的数值实例,以补充验证前面给出的理论结果.
对于系统(5),设置参数b,K为b=3,K=0.5,则条件
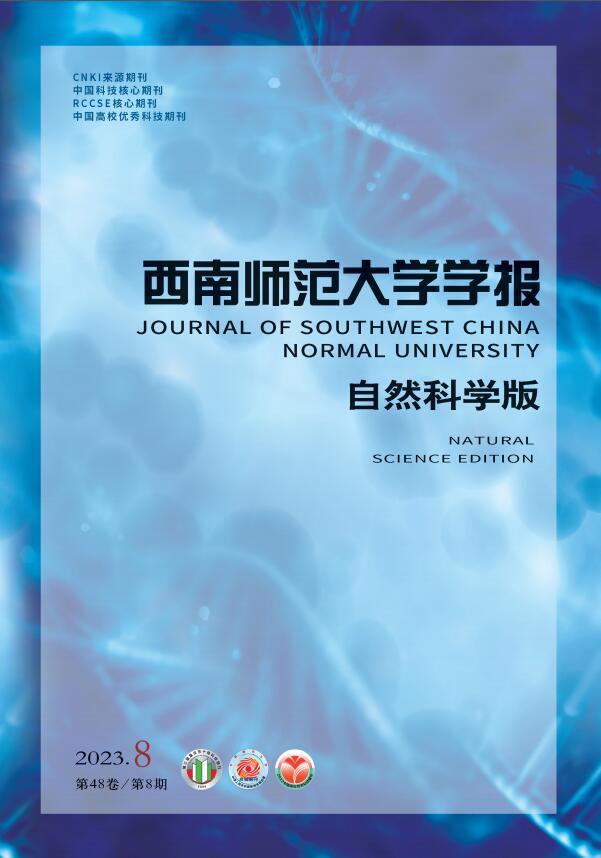
$b>1+2 \sqrt{K}$ 成立,由此可得正常数平衡点为(u*,v*)=(1.707 1,1.292 9),令参数a=9.5满足$0<a<\frac{\left(u^*\right)^2+u^*+K}{K}=10.2426$ ,则方程(10)存在唯一正根ω0=3.222 2. 再根据方程(12),计算可得$\tau_0^j=0.0107+\frac{2 j \pi}{\omega_0}$ (j∈$\mathbb{N}$ +). 因此由定理1可知:当τ∈[0,0.010 7)时,正常数平衡点(u*,v*)是局部渐近稳定的;当τ∈(0.010 7,+∞)时,正常数平衡点(u*,v*)是不稳定的. 且由Hopf分支定理[2]可知,当$\tau=\tau_0^j=0.0107+\frac{2 j \pi}{\omega_0}$ (j∈$\mathbb{N}$ +)时,系统(5)在正常数平衡点(u*,v*)处产生Hopf分支.取τ=0.006 5 < τ00,由定理1可知系统(5)的正平衡点(u*,v*)局部渐近稳定,如图 1.
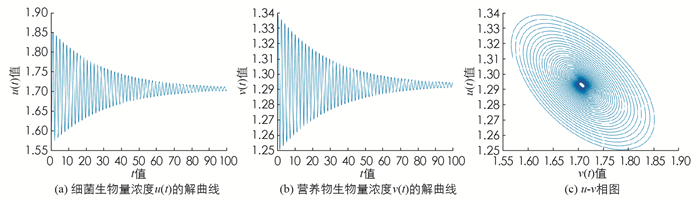
取τ=0.010 7=τ00,由定理1可知系统(5)在正平衡点(u*,v*)处产生Hopf分支,如图 2.
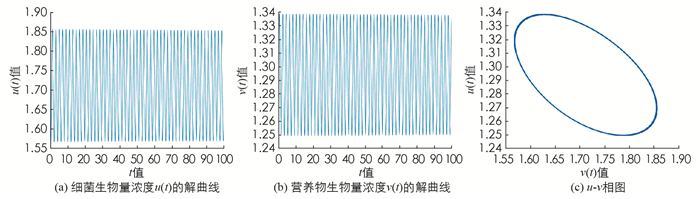
取τ=0.012 1>τ00,由定理1可知系统(5)的正平衡点(u*,v*)是不稳定的,如图 3.
对于系统(13),设置参数为b=10,K=16,d1=0.04,d2=0.5,l=3,且取参数a=3.9满足条件
$0<a<\frac{\left(u^*\right)^2+u^*+K}{K}=4.101$ ,则计算可得正常数平衡点为(u*,v*)=(6.561 6,3.438 4),由定理2可知,当τ=τnj(0≤n≤N0,j∈$\mathbb{N}$ +)时,系统(13)在正常数平衡点(u*,v*)处产生Hopf分支,且由(22)-(24)式计算可得τ00=0.011 2. 取τ=τ00=0.011 2和初值u0(x)=u*+0.65cos(5x),v0(x)=v*-0.65cos(5x),则在正常数平衡点(u*,v*)附近产生分支周期解,如图 4.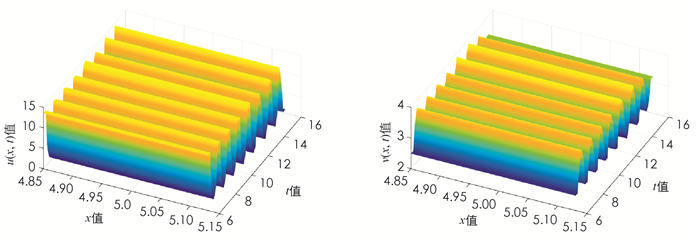
 DownLoad:
DownLoad: