


 下载:
下载:
-
开放科学(资源服务)标志码(OSID):

-
自十九世纪中期以来,两轮单车辙车辆因为其具有很强的机动性,被广泛应用于交通、运输和研究等[1]. 而近年来随着智能技术的快速发展,无人驾驶汽车、无人机等相继出现,不断地方便了人们的日常生活,而提高无人车辆的安全性,则有利于车辆智能化水平的提高[2]. 由于两轮单车辙车辆其横向动力学不稳定,使其自平衡的控制与研究逐渐引起了相关学者的兴趣.
从两轮单车辙车辆动力学的角度来看,两轮平衡车系统是一个复杂的非线性、强耦合、多变量的自然不稳定系统. 因此对于两轮单车辙车辆的控制早在19世纪末Whipple[3]和Carvallo等[4]就提出在一定速度下车体可以自平衡. 目前两轮单车辙车辆的自平衡主要有以下几种方式:通过控制转向力矩[5]、控制力矩陀螺(CMG)[6]、改变车体重心[7],早期是通过转向力矩和转向产生的离心力来平衡车体,但是当平衡车车速较低时,离心力太小,无法平衡传统的两轮单车辙车辆,这就导致静态或低速状态下的传统两轮单车辙车辆无法实现自平衡.
CMG可以在车辆静态和低速状态下平衡车体,为了稳定带有CMG的两轮平衡车,已有学者进行了一些研究. Park等[8]提出了一种二次线性调节算法用于平衡控制,并对外部不稳定的干扰做了研究;Nguyen等[9]提出一种低阶RH∞鲁棒控制器来控制两轮自行车的平衡,使陀螺性能有所提升;Tian等[10]针对不同轴两轮自平衡车辆的直线行驶和转弯控制,设计了自适应滑模控制器;陈志坚等[11]利用LQR控制器通过力矩陀螺稳定车身;Chiu等[12]在基于飞轮使两轮自行车平衡的研究中,运用Lyapunov稳定性定理对控制器的所有参数进行在线调整,使用了H∞控制技术稳定了控制力矩陀螺和车身. Lot等[13]通过特征值计算和时域仿真研究了稳定性,发现最有效的力矩陀螺布置方式就是陀螺对置布置. 本文主要采用了单框架对称布置的控制力矩陀螺(SGCMG)来产生一个对抗重力矩,从而使车体平衡.
全文HTML
-
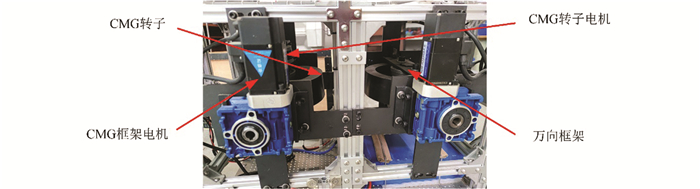
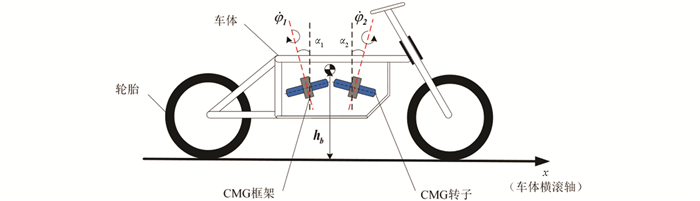
两轮平衡车的自平衡功能主要利用两个可以产生进动力矩的控制力矩陀螺(CMG)实现,本文采用的对置式控制力矩陀螺其结构如图 1所示. 力矩陀螺舱主要由两个对置布置的控制力矩陀螺组成,两个控制力矩陀螺分别由两个万向框架固定在控制力矩陀螺舱中,力矩陀螺舱与车架相连. 如图 2所示,当两个力矩陀螺框架被两个伺服电机带着转动时,力矩陀螺将分别产生大小相同、方向相反的框架角度α1,α2. 另外还有两个高转速电机来驱动陀螺转子,使其分别达到
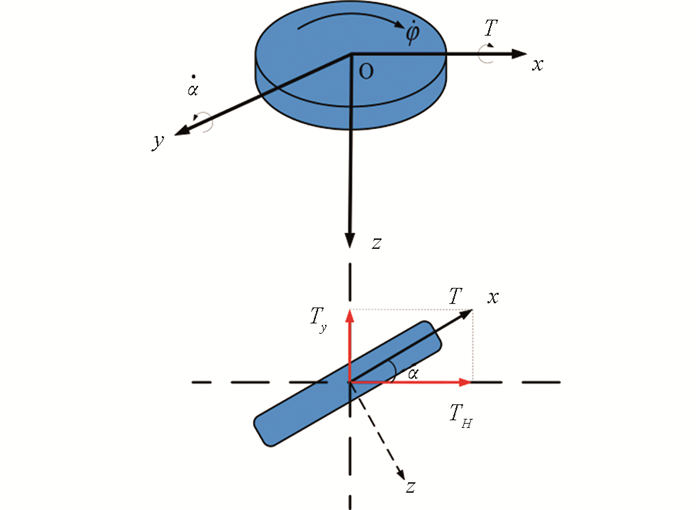
$ \dot{\varphi}_1 $ 和$ \dot{\varphi}_2$ 的转动速度.对于单个陀螺转子来说,如图 3所示,当电机控制框架使陀螺转子产生一个进动角速度
$ \dot{\alpha}$ ,此时控制力矩陀螺会产生一个沿着陀螺x轴方向的进动力矩,其方向和大小可定义为式中:T为控制力矩陀螺进动力矩,Ig为陀螺转子的转动惯量.
当力矩陀螺转动到角度α处时,会在车体横滚轴和垂直轴产生两个扭矩:
式中:水平方向上的扭矩TH作用于车体的横滚轴,用来稳定车体,而垂直轴上的扭矩Ty,可能会导致车体的偏航.
由公式(2)和公式(3)可知,当力矩陀螺转动的角度α为90°时,力矩陀螺产生的力矩将全部作用在垂直轴上,而作用于车体的有效力矩TH将为零,此时车体无法通过控制力矩陀螺达到平衡,车体失控,这种现象称为力矩陀螺的奇异现象[14].
为了保证力矩陀螺作用于车体横滚轴上的有效扭矩最大,将两个力矩陀螺对置式布置,陀螺转子以大小相同而方向相反的转速旋转. 此时,两个力矩陀螺在垂直轴上产生的扭矩将相互抵消,而作用于车体横滚轴上的有效力矩为两个力矩陀螺的总和,可表示为
由公式(4)可知,随着陀螺转子转速
$ \dot{\varphi}_1 $ 和$ \dot{\varphi}_2$ 的增大以及其进动角速度$ \dot{\alpha}$ 的增大,使其作用在车体横滚轴上的有效力矩逐渐增大,因此,在较大初始倾角或存在较大的外部扰动的情况下,车体可以通过电机控制陀螺的框架角速度实现自平衡. 在实际工作中,我们考虑到陀螺工作的稳定和控制器的结构,将陀螺转子的转速恒定在固定的转速,使其产生稳定的有效力矩. -
两轮平衡车的动力学方程由传统的两轮单车辙车辆横滚动力学方程和力矩陀螺动力学方程组成,为了得到静态下两轮自平衡车较为准确的数学模型,考虑了如下假设:
1) 两轮平衡车的转向和纵向速度为零.
2) 不考虑轮胎在z轴上的弹性变形以及与地面之间的滑动.
3) 陀螺框架和转子作为围绕其质心的点质量.
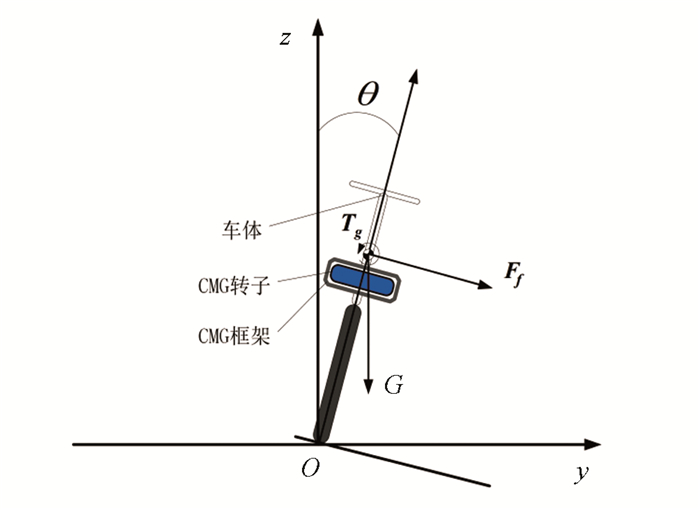
如图 2和图 4所示,两轮平衡车绕x轴(横滚轴)的自平衡动力学方程可表示为
式中:I0为车体相对于轮胎与地面接触点O的转动惯量,θ为平衡车横滚角度,Tb为平衡车重力矩,Tf为作用在横向的扰动力矩.
公式(5)中车体相对于轮胎与地面接触点O的转动惯量为
式中:Ib为整车过质心绕x轴的转动惯量,mb为整车质量,hb为整车质心高度.
两轮平衡车重力作用在车体x轴(横滚轴)上的力矩为
由于选取力矩陀螺转子的转速
$ \dot{\varphi}_1 $ 和$ \dot{\varphi}_2$ ,陀螺框架转动角速度$ \dot{\alpha}_1 $ 和$ \dot{\alpha}_2$ 大小相等方向相反,等式(4)可定义为两轮平衡车易受多种扰动,Ff被认为是垂直于车架(绕x轴)作用的扰动力,其横向扰动力矩为
式中:hf为扰动力到地面的距离. 将公式(6)(7)(8)(9)带入到公式(5)中可得:
由公式(10)我们不难得出,控制力矩陀螺作用在两轮车x轴上的扭矩就是为了抵抗车体重力矩以及抵抗外部扰动,以使两轮车能够自平衡.
1.1. 系统组成及陀螺工作原理
1.2. 两轮平衡车动力学模型
-
由于两轮车的动力学模型类似于一个倒立摆模型,该系统是一个不稳定的多变量耦合系统,受非线性、参数不确定性和未建模动力学等一系列因素的影响,为此设计了一个ADRC,它可以较好地处理模型中非线性项目对未知的噪声及扰动不敏感问题,使两轮车在静态下能够很好地达到平衡效果.
由公式(10)可知,两轮车的自平衡是依靠控制力矩陀螺的进动扭矩,系统可定义为
我们定义系统的输入u=
$ \dot{\alpha}$ 、状态变量x1=θ,x2=$ \dot{\theta}$ ,由于系统是一个非线性系统,很难将系统转化为状态空间的形式. 我们定义一个新的状态变量x3=f,而f被称为总扰动,包含系统的扰动、系统的非线性部分以及输入的非线性部分的扰动,此时系统可以转化为式中:
因此两轮平衡车系统的状态变量为x=[x1 x2 x3]T,输入u=
$ \dot{\alpha}$ ,输出y=θ,状态空间可表示为根据上述系统的状态空间,设计一个包含扩张状态在内的观测器(ESO),以将系统的总扰动f实时地估计出来. 观测器估计的状态变量
$ \overset{\wedge }{\mathop{x}}\, ={{\left[ \begin{array}{*{35}{l}} {{\overset{\wedge }{\mathop{x}}\, }_{1}} & {{\overset{\wedge }{\mathop{x}}\, }_{2}} & {{\overset{\wedge }{\mathop{x}}\, }_{3}} \\ \end{array} \right]}^{\text{T}}}$ ,输入u=[u θ],输出$ \overset{\wedge }{\mathop{y}}\, ={{\left[ \begin{array}{*{35}{l}} {{\overset{\wedge }{\mathop{x}}\, }_{1}} & {{\overset{\wedge }{\mathop{x}}\, }_{2}} & {{\overset{\wedge }{\mathop{x}}\, }_{3}} \\ \end{array} \right]}^{\text{T}}}$ ,观测器的增益为L=[l1 l2 l3]T. 由不稳定系统Leuenberger观测器[17]的一般形式可得,包含扩张状态的ESO可表示为根据ei=x-
$ \overset{\wedge }{\mathop{x}}\, $ ,i=1,2,3,公式(15)和公式(17)可得误差等式:式中:
如果Ae的行列式特征值全都在左半平面,那么ESO输入输出稳定,此时Ae的行列式特征多项式为
这里将行列式的特征值配置在-ω0,此时:
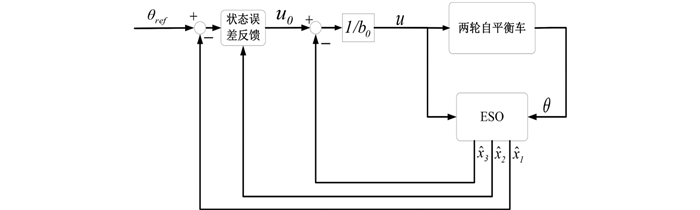
ADRC控制器主要由能够根据系统输入输出信号对状态量及总扰动进行估计的ESO和状态误差反馈控制律组成,根据上述构造的ESO,针对陀螺自平衡车动力学模型设计状态误差反馈控制律,ADRC控制器结构框图如图 5所示.
适当地设计扩张状态观测器后,控制器的输出构造为
若忽略
$ {{\overset{\wedge }{\mathop{x}}\, }_{3}}$ 中的估计误差,系统被简化为单位增益双积分器:控制器中状态误差反馈控制律为PD控制器,PD控制可以让双积分系统的闭环极点左移,从虚轴移动到s平面的左半平面,因此u0可表示为
式中:θref为两轮平衡车的期望角度,kp1,kd1为控制器增益参数. 若车体处于平衡状态,那么期望横滚角速度
$ {{{\dot{\theta }}}_{ref}}$ =0,控制器闭环传递函数为纯二阶无零点形式:使用极点配置法,将控制器的极点配置在-ωc,那么:
-
设计一个传统的PD控制器,以提供一个与ADRC方案的比较策略,控制器的结构为
式中:eθ与
$ \dot{e}_\theta$ 为车体横滚角度、横滚角速度与期望值的误差,kp2与kd2为控制器比例和微分环节的控制参数,通过设置相同的初始条件和实验条件,与ADRC方案进行比较.
2.1. 自抗扰控制器(ADRC)设计[15-16]
2.2. PD控制器设计
-
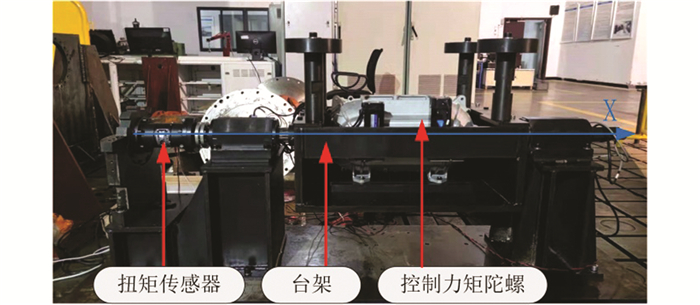
在带有陀螺的两轮车自平衡试验之前,我们对力矩陀螺所能产生的有效力矩做了台架试验,如图 6所示,控制力矩陀螺固定在陀螺试验舱内,扭矩传感器固定在测试台架的水平轴上,以测量SGCMG工作时在台架水平轴上产生的有效力矩,其目的是模拟SGCMG工作时,在两轮平衡车上所能产生的有效进动力矩.
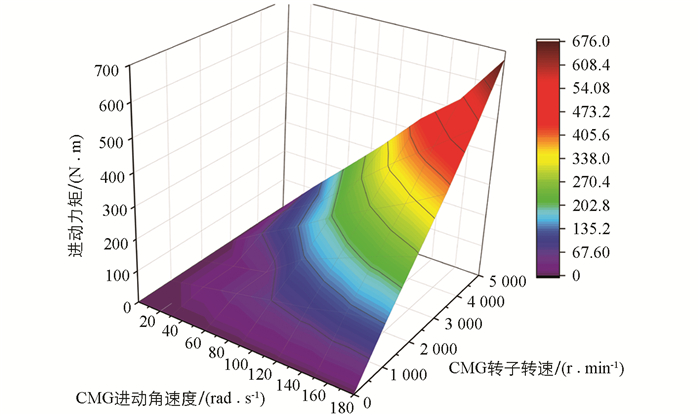
在控制力矩性能试验中,我们考虑到电机以及实际平衡车的工作需要,将陀螺的转子转速设置在0~5 000 r/min,CMG框架的进动角速度控制在0~180 rad/s的范围内,测量其在不同转子转速和不同框架进动角速度下控制SGSMG在台架水平轴所能产生的最大进动力矩.
台架测试结果如图 7所示,SGCMG在台架水平轴上产生的进动力矩随着CMG进动角速度和转子转速的增大而增大,验证了公式(4)的准确性. 当控制力矩陀螺转子转速达到5 000 r/min时,进动力矩达到了最大为676 N·m,约等于实际质量为256 kg的两轮平衡车理论上重力在车体倾斜35°时产生的重力矩,陀螺输出的有效力矩能够保证后续试验的进行,因此进动力矩关系着两轮车所能平衡的最大偏角以及抵抗外部干扰的能力.
-
为了体现ADRC控制器的控制效果,定义了控制器中的所有参数,其中表 1给出了两轮平衡车与控制力矩陀螺的实际参数,表 2给出了ADRC控制器中ω0,ωc的具体参数以及PD控制器中kp2,kd2的具体参数.
为了更好地分析ADRC控制器的能力,在MATLAB/Simulink中设计了两种工况下的仿真实验方案:静态自平衡与静态抗扰动仿真实验,观察两轮自平衡车的横滚角度与控制力矩陀螺框架角度的变化情况,并将ADRC控制器与传统的PD控制器进行比较.
为了更好地分析ADRC控制器的能力,在MATLAB/Simulink中设计了两种工况下的仿真实验方案:静态自平衡与静态抗扰动仿真实验,观察两轮自平衡车的横滚角度与控制力矩陀螺框架角度的变化情况,并将ADRC控制器与传统的PD控制器进行比较.
-
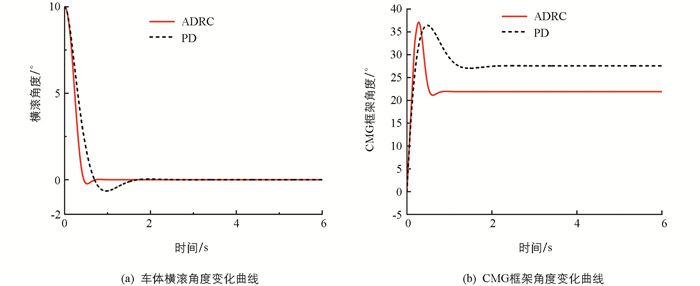
实验考虑到力矩陀螺性能,设置相同的转子转速为3 000 r/min,并结合陀螺框架电机实际的转速限制,将CMG框架进动角速度限制为180~-180 rad/s之间. 根据力矩陀螺性能试验结果,设置车体的初始偏角都为10°,仿真了两轮自平衡车分别在ADRC控制器与PD控制器下两轮车的静态自平衡效果. 其仿真结果如图 8所示.
图 8(a)为两种控制方法下的车辆横滚角,可以看出,使用两种控制器都可以使两轮车从车体偏角为10°的状态迅速回到0°,但是ADRC控制器较PD控制器能够使两轮车更快地回到直立位置,说明了ADRC可以更有效地保证两轮车的自平衡性能. 而图 8(b)为两种控制方法下的陀螺框架角度,ADRC控制器和PD控制器都需要牺牲一定的陀螺框架角度才能使车体平衡,而且ADRC控制器与PD控制器在平衡车体的过程中,最大框架角度都达到37°左右,但是在车体回到平衡位置且框架角度稳定后,ADRC控制器的框架角度为22°,PD控制器的框架角度为27°,ADRC牺牲的框架角度很小,意味着在平衡之后两轮车能够更大限度使用控制力矩陀螺抵抗外部干扰.
-
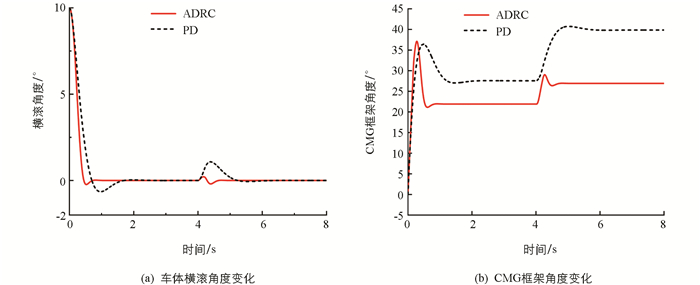
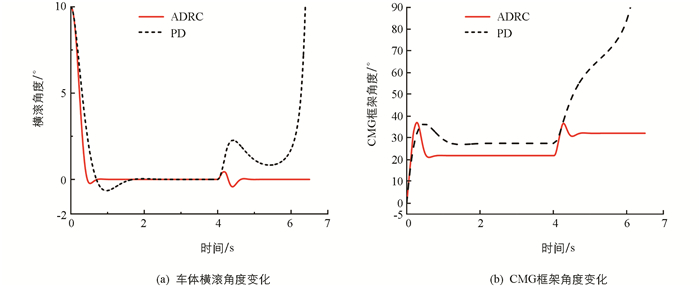
在静态抗扰动实验中,为了体现车辆平衡后抵抗外部干扰的能力,将车辆的初始角度设置为10°,结合陀螺框架电机实际的转速限制,将CMG框架进动角速度限制为180~-180 rad/s,通过控制器控制使车体横滚角度稳定在0°后,在实验的第4 s,同时给予车体100 N的横向冲击干扰,其持续时间为0.2 s,作用在车体的质心位置,仿真结果如图 9所示. 随后再次进行仿真实验,同时给予车体200 N的横向冲击干扰,其持续时间为0.2 s,作用在车体的质心位置,仿真结果如图 10所示.
图 9(a)和图 9(b)为两轮平衡车在受到100 N横向冲击时,车体横滚角度与陀螺框架角度的变化情况. ADRC控制器与PD控制器在车体受到外部横向冲击干扰后,控制力矩陀螺都迅速做出了反应,使车体重新回到直立位置. 但是ADRC控制器使车体偏离直立位置的横滚角度为0.2°,PD控制器则有1.2°的偏离,而且ADRC车体回到直立位置的时间大约有0.6 s,而PD控制器稳定时间达到了1.2 s. 对于CMG框架角度,ADRC控制下框架角度最终增加了5°,PD控制下的框架角度增加是ADRC控制器的2倍,PD控制器下的两轮平衡车随着陀螺框架角度的增加导致抵抗外部扰动的能力快速下降,这表明了ADRC控制器能够更好地抵抗外部干扰
当实验施加了200 N的横向冲击干扰后,如图 10所示,PD控制器下的陀螺框架角度迅速达到90°,出现陀螺奇异,无法提供有效力矩导致车辆失去平衡. 而在图 10(a)所示的车体横滚角度,ADRC控制下的两轮平衡车仍然能够很快地回到直立位置,横滚角度波动为0.2°,而且陀螺框架角度最终增加的角度也只有10°,车体仍然能够抵抗外部干扰. 结果表明,ADRC控制器较传统的PD控制器能够抵抗更大的外部扰动.
4.1. 平衡车静态自平衡仿真实验
4.2. 平衡车静态抗扰动仿真实验
-
本文针对两轮单车辙车辆的不稳定系统,使用了对置式控制力矩陀螺用于提供平衡车体的有效力矩,并针对SGCMG自平衡车,采用了一种自抗扰控制器,解决了两轮单车辙车辆的静态自平衡和抗干扰问题,并对使用自抗扰控制器的自平衡车进行了仿真实验和讨论,得出以下结论:
1) 自抗扰控制器与传统的PD控制器相比,该控制器能够更加迅速地使车身从倾斜状态恢复到直立位置,而且控制力矩陀螺提供有效力矩后,牺牲的陀螺框架角度更小.
2) 在施加横向扰动力的仿真实验中,自抗扰控制器控制下的两轮自平衡车能够更好地将车体横滚角度稳定在0°左右,对于横向扰动力的抵抗能力较传统的PD控制器来说更佳.