


 下载:
下载:
-
开放科学(资源服务)标识码(OSID):

-
汽车被誉为“现代工业皇冠上的明珠”,是体现国家制造实力的重要标志。但传统燃油汽车以化石燃料为能源,排放的污染物不仅对环境有害,还会危害人类健康和生态系统。此外,我国汽车保有量不断增长,对外石油依存度超过70%,较高的石油依存度及变幻莫测的国际形势,可能危及能源安全。鉴于汽车工业的可持续发展面临能源和环境的双重挑战,发展新能源汽车已经成为全球共识。我国于2010年将新能源汽车列为七大战略性新兴产业之一,并在2016年的《国家创新驱动发展战略纲要》中提出,开发氢能、燃料电池等新一代能源技术。2020年10月,国务院办公厅印发的《新能源汽车产业发展规划(2021-2035)》提出,积极开展先进模块动力化电池与燃料电池系统技术攻关,突破氢燃料电池汽车应用支撑技术等瓶颈,提升基础关键技术和关键材料等研发能力。因此,发展氢燃料电池技术对于推动清洁能源转型、能源可持续发展以及科技创新都具有重要意义[1]。
氢燃料电池汽车自带能量转换装置,只要维持燃料供给就能连续发电,且燃料补给时间短,是一种可以持续使用电能的理想汽车。氢燃料电池系统的主要组成部件有氢气储存装置、氧气供应系统、燃料电池堆、空压机、电子控制系统和电驱动系统。其中,电子控制系统主要用于监控和调节氢气和氧气的供应比例,控制电池系统的运行状态并确保系统安全稳定地运行。空压机系统由压气机和控制器等组成,是燃料电池动力系统中最为关键的子系统之一,被誉为“燃料电池之肺”。电机是空压机动力部件,主要用于压缩空气、冷却风扇和驱动排水泵。提高电机转速可减小体积、降低噪音并提高功率密度,是未来发展的必然趋势。但电机的高速和小型化导致传感器难以安装,使现有基于多传感器的控制理论在实际应用时面临挑战[2]。永磁同步电机因功率密度高、转矩惯量比大、动态响应速度快而备受关注,其起动时需确定转子初始位置后才能获得最大起动转矩[3]。利用机械式传感器检测转子位置会增加系统成本并降低电机功率密度,且其易受温度和电磁噪声干扰,降低系统的可靠性。因此,无位置传感器技术是解决这一问题的重要途径。
鉴于电机无传感器控制技术的重要性,国内外学者早在20世纪80年代就开始了相关研究[4]。其中,永磁同步电机无传感器控制技术可通过自身特性建立模型,实现对电机状态的精准控制,相关研究已经取得一定进展,常见的无传感器控制算法研究见表 1。针对超高速电机结构的复杂性,需对其进行结构简化以提高响应速度。Cao等[5]提出一种自适应反电动势观测器方法,解决了电机参数变化导致的控制精度下降问题。Shi等[6]针对传感器成本高、体积大、可靠性低、环境干扰等问题,提出了基于迭代卡尔曼滤波算法的电机转速和转子位置估计方法,该方法具有良好的抗负载干扰性能。Faggion等[7]验证了利用转子各相异性特性注入高频信号的无位置传感器控制技术的可行性。Ichikawa等[8]在表面式和内置式永磁同步电机中实现了在线参数辨识和基于参数辨识的无传感器控制,所识别的参数不受位置估计误差的影响。Wang等[9]比较了不同的高频信号注入方案、基本脉宽调制激励方法和基于模型的无传感器控制策略,推动了无传感器控制的实现。Shinnaka等[10]提出了一种新的无传感器矢量控制方法,能在限压条件下实现宽速度范围驱动并限制电流,且效率较高。Tomei等[11]设计了一种新型六阶非线性自适应控制算法,实现了转速的局部指数跟踪。陈德海等[12]提出了一种以超螺旋滑模自抗干扰为核心的控制策略,显著提高了无传感器控制算法的抗干扰性能,但该方法尚未在超高速电机中得到验证。王涛等[13]设计了扰动电压观测器,可减小位置和速度估计误差,但仅适用于低速和零速状态。廖凯举等[14]提出了基于积分滑模观测器的谐振频率的跟踪控制方法,显著提高了谐振频率跟踪精度,但其要依赖高精度行程观测器才能保证谐振频率跟踪性能。赵琨等[15]设计了一种以定子电流与反电动势为状态变量的Super-Twisting滑模观测器,该方法明显提升了转子磁链的估计精度,缺点是仅考虑了转子磁链易受转子侧参数影响的情况。
对国内外超高速电机无传感器控制算法的研究现状进行梳理后可知,部分方法仅适用于单一工况,难以满足超高速电机在全速域范围内的运行需求,且未解决控制精度和稳定性下降的问题。此外,部分方法仍处于理论研究阶段,鲜见于实际工程应用的报道。未来,超高速电机的转速将进一步提高,考虑到相关技术涉及到航空、航天等尖端领域,技术引进难度大,因此有必要对其进行深入探索。
全文HTML
-
为满足氢燃料电池空压机的使用要求,超高速电机需采用特殊的设计和制造工艺,选用高强度、低密度材料来提高电机的机械强度和承载能力,从而适应转速和功率密度不断提升的发展趋势。为减小不平衡力和振动,电机输出轴设计要满足极高的精度要求。同时,超高速电机的轴承应具备高承载能力、高转速、低摩擦等特性[16]。除满足上述的硬件结构要求外,其控制系统必须具备高精度性能,以确保实际运行时的安全性和可靠性。
超高速电机的输入参数主要由空压机的转速和轴功率确定,空压机在正常工作时的转速为2.0×104~6.8×104 r/min (本研究的空压机由合作单位定制,6.8×104 r/min为最高转速)。电机结构主要包含定子、转子及冷却系统等。电机定子采用高性能永磁体材料制成,内部结构分为定子铁芯、定子绕组、定子槽。根据成熟的电机设计经验,首先假定极数为2、槽数为6,形状为弧形梯边槽。定子铁芯由自粘性硅钢片冲制叠压而成,硅钢片厚度为0.1 mm,铁芯采用胶粘固化工艺成型,槽体为弧边梯形槽。电磁输入和输出参数如表 2所示。
定子的状态随电机工作情况的变化而变化。空载状态下,高速电机定子状态趋于稳定,无抖动和噪音出现。然而,超高速电机大多数情况下处于高转速状态,这对定子的带载强度以及磁力线提出了更高的要求。在带载运行时,电机需承受外部负载,导致定子振动加剧、温度上升,并可能引起定子槽内绕组发生形变。若形变过大,易造成绕组接触不良甚至短路故障,因此对定子电磁特性进行系统分析至关重要。
超高速电机的转子由永磁体组成,永磁体通常采用稀土磁体材料(如铁氧体、钴磁体等)制成,磁场强度高、稳定性强,相比于传统励磁方式,大大提高了功率密度和励磁效率,能够准确预测转子固有频率,对减少系统故障非常重要[17]。本研究中超高速电机所选用的转子参数及电机输出参数见表 3。
-
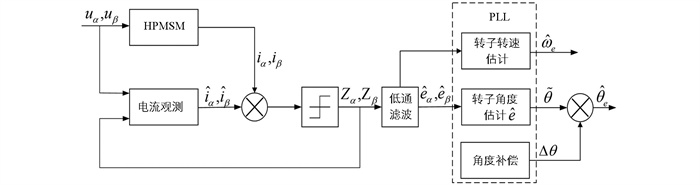
滑模观测器(Sliding Mode Observer,SMO)的设计需要根据具体的系统和应用需求而定,其中滑动面和观测器的设计是控制策略的关键环节。观测器的设计需要考虑到系统的动态特性和噪声等因素。对超高速电机进行Simulink建模,实现超高速电机矢量控制系统的仿真。滑模观测器控制结构框图如图 1所示。
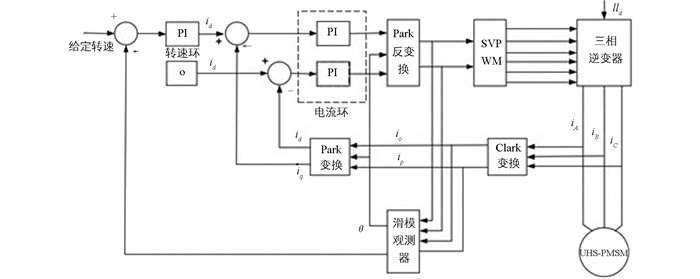
传统SMO的结构需要结合反正切函数观测位置速度信息,系统的输入信号为uα和uβ。考虑到SMO的开关函数在工作时会产生一定频率的抖振,而这将影响输入信号的稳定性,因此需要利用低通滤波器对开关函数进行滤波,以得到反电动势信号。为提高控制模型的精度,引入角度补偿作为反馈输入,对转子位置进行精确估算。最后,控制器将状态估计值和其他信息结合,生成控制信号,输入控制系统并输出精确的转子角度和位置信息。对UHS-PMSM仿真建模时,采用速度—位置双闭环结构,用SMO替换传统UHS-PMSM模型的位置传感器,简化系统结构以提高可靠性,详见图 2。
-
和其他控制方法相比,传统SMO结构简单、操作方便,通常用于中低速永磁同步电机的控制。对于转速可达2.0×104 r/min的超高速永磁同步电机,传统SMO策略已经很难满足其控制系统的要求。因此,有必要对前述的矢量控制方法进行改进,提出一种效率更高、鲁棒性更好的方案,以建立适用于UHS-PMSM的无传感器控制系统。
在对UHS-PMSM的物理模型进行必要简化之后,为更好地控制电机速度和位置,进一步实施了三相静止坐标系、两相静止坐标系和两相同步旋转坐标系的变换。此外,电机常用的逆变器控制方法有指定谐波消除法脉宽调制(Selective Harmonic Eliminated Pulse Width Modulation,SHEPWM)、电流谐波最小脉宽调制(Current Harmonic Minimization Pulse Width Modulation,CHMPWM)和空间向量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)等。其中SVPWM可将直流电压信号转为交流信号,实现全方位、多维度的精确控制。结合滑模观测器结构,可推导出低通滤波器在两相静止坐标系下的电机反电动势估计值,如式(1)所示:
式中:ωc是低通滤波器截止频率,r/s;
$ \hat{i}_\alpha 、\hat{i}_\beta$ 是α、β轴电流iα、iβ的估计值,A;$\hat{E}_\alpha 、\hat{E}_\beta $ 是对应的反电动势估计值,V; sign表示符号函数,s是滑模面函数,λ是增益。ωc即传统低通滤波器的截止频率,其大小由定子电流的基波频率决定。理想的低通滤波器不仅能有效抑制相关低阶谐波,还对高阶滤波具有较好的滤除效果。由于符号函数的存在,反电动势信号会包含大量的谐波,导致低通滤波器产生幅值衰减和相位滞后。传统的二阶滑模观测器受低通滤波影响,常出现高频振荡、计算复杂、参数不准确等问题,从而降低电机矢量控制系统的性能,且其稳定性需要通过李雅普诺夫函数进行验证。用两相静止坐标系电流参数可表达李雅诺普函数,如式(2)所示:
低通滤波器截止频率的值一般较大,滑模观测器收敛的条件为:
$\dot{V}=s^T \dot{s}<0 $ ,推导可得式(3)和式(4)[18]式中:eα、eβ是α、β轴反电动势,V;
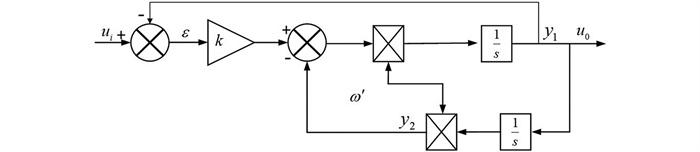
$ \tilde{i}_\alpha 、\tilde{i}_\beta$ 是定子电流的误差值,A;$ \dot{\tilde{i}}_\alpha 、\dot{\tilde{i}}_\beta$ 是定子电流导数,A/s。满足了上述条件的滑模观测器即可达到稳定状态。在阐述了传统低阶滤波器滑模结构的可达性条件后,为改善其幅值衰减及滤波相位延迟等问题,本研究搭建了一种改进双二阶滑模观测器结构。UHS-PMSM矢量控制系统中的逆变器会使反电动势中包含基波分量和高次谐波分量,因此需要建立适合高转速工况、高控制精度的无传感器控制系统模型,以消除高频分量等干扰。二阶广义积分器结构框图如图 3所示。
传统的二阶广义积分器模型可以实现滤波效果及无差跟踪,具有明显的谐波抑制能力,传递函数如式(5)和式(6)所示:
式中:u为输入信号; y1、y2为输出信号; ω′为输入角频率,r/s; k为可调阻尼系数,通常取值0.707; s是复数域变量。
-
前述的二阶广义积分器可在无位置传感器控制系统中进行反电动势滤波处理,但对5次、7次等奇次谐波的衰减能力不足,且不能同时实现滤波效果提升和滤波延迟消除[19]。为了更精确地估计电机转子转速和位置,在此引入四阶广义积分器,以提高系统的鲁棒性和控制精度,其传递函数如式(7)~(9)所示:
式中:k1和k2是阻尼系数。
为了更好地完成高频谐波的滤波,需要综合二阶及四阶广义积分器的动态性能,同时保证带宽大小相同。结合梅森增益公式,将系统的闭环函数表示为各个回路增益的加权和,先串联二阶和四阶广义积分器,再计算出闭合反馈回路的增益,优化和提升后的控制系统传递函数在转换频域后表达如式(10)所示:
式中:k为阻尼系数; Kk为幅值增益; ωfk′为改进系统的谐振频率,r/s。
根据上式可得Gk(s)的频率特性,可用指数形式表示,如(11)所示
当ω=ωk时可得:
式中:|Dk(jω)|和∠Dk(jω)分别为传递函数的幅值和相角; j是虚数单位。
-
为了验证上文控制系统的性能,在MATLAB/ Simulink中对所搭建的改进型滤波系统以及转子位置速度观测结构进行仿真,模型仿真步长设置2e+4s。通过对调节器转速环与速度环的比例积分(Proportional-Integral,PI)控制参数计算方法及仿真模型的多次调试,最终将PI参数设置为kps=1、kis=0.1、kpc=30、kic=9 457。利用模型分别对转子转速、位置和反电动势等参数进行估计,并与传统滑模观测结构进行对比验证,以检验改进后系统估计精度与稳定性。为满足UHS-PMSM的调速范围,在仿真模型阶跃输入0.3×104、0.6×104、1.0×104、2.0×104 r/min的转速信号,观测UHS-PMSM的预测精度与稳定性。
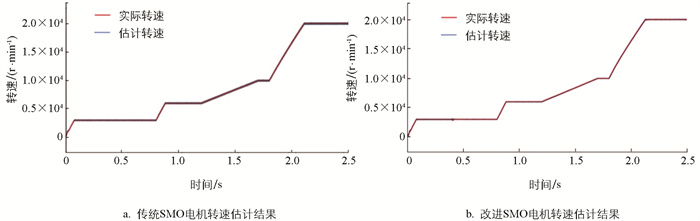
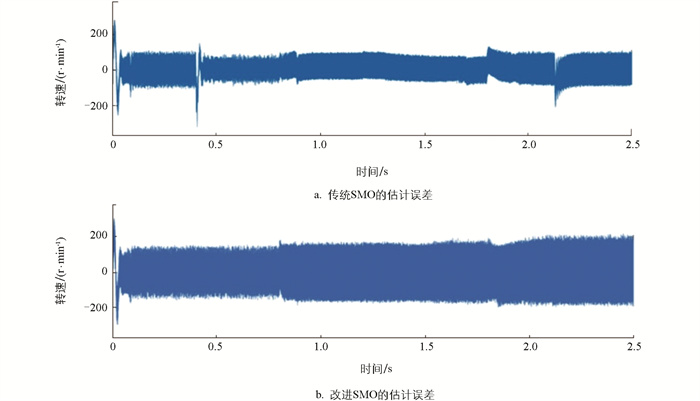
图 4和图 5分别为应用传统SMO控制策略和改进SMO控制策略的电机转速和转速误差对比。其中,估计转速误差Δv定义为估计转速
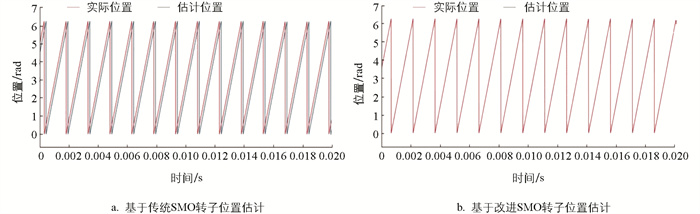
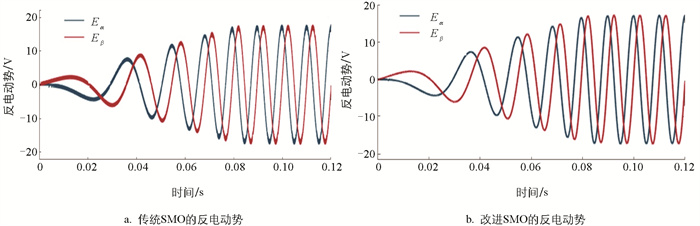
$\hat{v} $ 与期望转速v之差,即$\Delta v=\hat{v}-v $ ,观察可知传统SMO控制策略的估计转速超调量较显著,特别是在20 000 r/min时,曲线振荡明显,且最大误差接近200 r/min。采用改进SMO控制策略的转速估计值与实际值吻合良好,且超调量较小,转速曲线平滑上升,最大误差降低至150 r/min左右,降幅达25%。因此,改进的SMO控制策略有效提升了电机转速的控制精度。图 6为应用传统SMO控制策略和改进SMO控制策略的电机转子位置对比。由图 6可知,改进后的控制策略电机转子实际位置和估计位置基本重合,消除了相位延迟。图 7为两种策略下的电机反电动势比较,可以看出应用改进SMO控制策略后,电机反电动势波形趋势更平滑,且更接近正弦曲线。
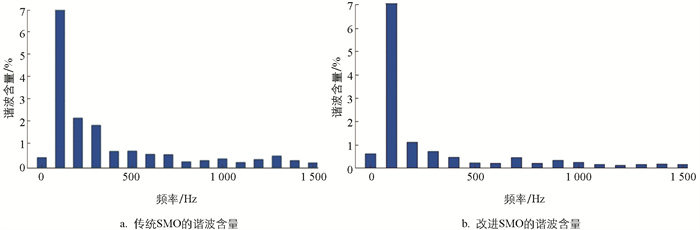
图 8为应用传统SMO控制策略和改进SMO控制策略的电机反电动势谐波含量及总谐波失真(Total Harmonic Distortion,THD)对比。将电机在2.0×104 r/min时的基础频率设置为99.99 Hz,由图 8可知,谐波含量明显降低,且THD值由4.81%下降至2.80%,因而改进的SMO控制策略具有更好的滤波能力。
2.1. 超高速电机无传感器控制系统仿真建模
2.2. 传统低阶滤波器滑模结构
2.3. 改进的滤波滑模观测器结构
2.4. 系统建模仿真及结果分析
-
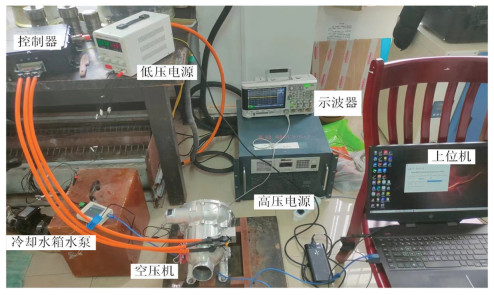
为验证相关仿真结果的可靠性,根据电机控制模型原理搭建了空压机实验台,进行稳态转速验证实验。由图 9可知,空压机实验台架由控制器、低压电源、高压电源、示波器、上位机、空压机、冷却水箱水泵组成。鉴于改进SMO无传感器控制算法主要在高速阶段实现高效控制,为避免电机在低速阶段起动困难,在开机时采用I/F三段式开环起动策略。起动电流Iop=2A。低速阶段速度环由位置角发生器替代,当电机转速升至足够高且运行稳定后,切换至速度闭环控制模式。
-
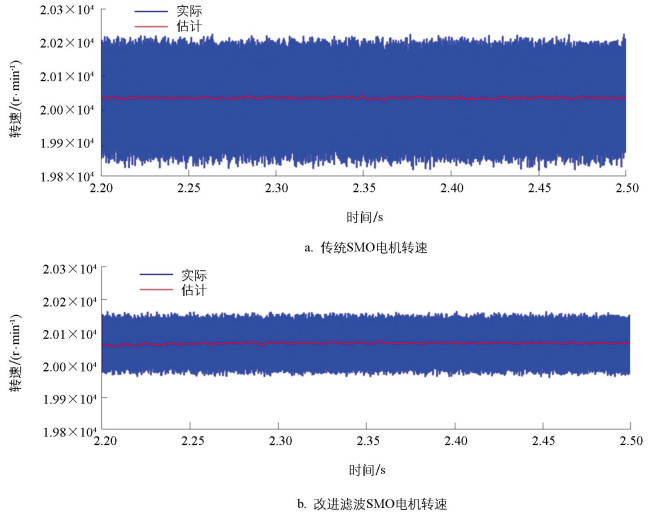
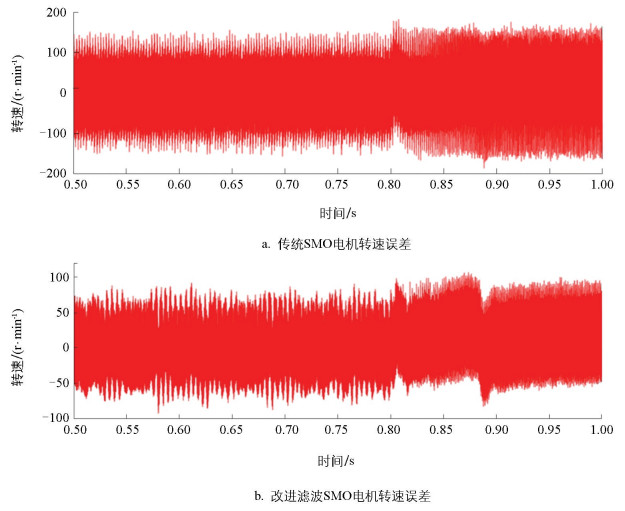
为检验改进滤波SMO算法的有效性,分别进行了传统SMO控制和改进滤波的SMO控制实验。当空压机切换到双闭环控制模式且转速稳定时开始观测数据,待空压机空载状态运行至2.0×104 r/min时,将上位机提取的模拟量输出至示波器,得到如图 10所示的转速对比及图 11所示的转速误差对比。
由图 11可以看出,相比传统SMO控制算法,改进后的SMO控制算法实验数据更符合期望。具体而言,传统SMO控制算法的稳态转速误差为0.7%,改进SMO控制算法的稳态转速误差为0.3%,表明控制精度得到了有效提升,同时电机瞬态转速波动的变化减小。
-
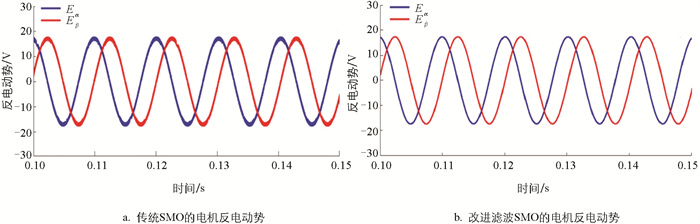
高频谐波会影响电能传输的稳定性和可靠性,增大电机系统的功率损耗。因此,当电机运行时,高频谐波和开关噪声的消除至关重要。图 12为空压机台架实验中的反电动势输出波形。由图 12可知,传统SMO控制策略输出的波形中含有大量谐波,改进滤波SMO控制算法对高频谐波和开关噪声进行了有效过滤与抑制,使得其反电动势波形相比传统SMO控制策略更加平滑且正弦度更高。波形未见振荡和峰值异常,说明改进滤波SMO的估算精度和控制性能更好。
-
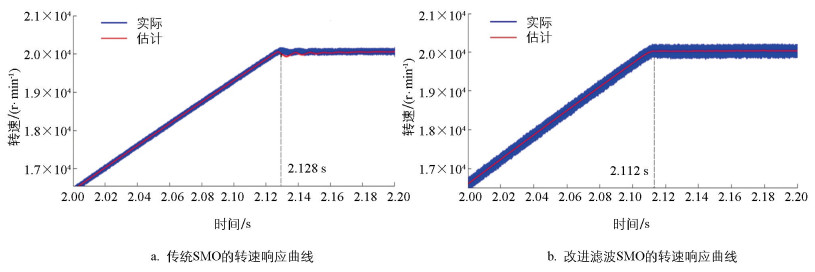
由于超高速电机在工作过程中需具备良好的负载变化响应能力,故对其动态性能进行实验分析。在空压机出风口施加恒定的负载,截取转速阶跃上升至2.0×104 r/min的实验数据进行分析,得到如图 13所示的空压机转速响应曲线。由图 13可知,在动态工况下,改进滤波SMO算法相比传统SMO算法转速误差更小,转速超调从1.70%降至1.15%,负载跟随能力增强。通过动态响应和稳态转速2种工况的对比测试可知,改进滤波SMO算法可使超高速电机具有更好的转速输出和动态响应性能,明显提升了空压机的综合表现。
3.1. 稳态转速验证
3.2. 反电动势验证
3.3. 动态验证
-
通过对超高速电机传统无传感器控制方法的仿真分析及实验测试,得出如下结论:
1) 改进后的控制系统在2.0×104 r/min转速下,估计误差降低25%,有效改善了位置估计的相位延迟问题,谐波中THD数值由4.81%下降至2.80%。综上,本研究所提方法在估计精度和鲁棒性方面都得到了有效提升。
2) 设计并搭建了氢燃料电池空压机测试平台,验证了本研究所提出方法的可行性。所研究的方法具有普遍性,对不同电机进行控制时,只需根据其磁链、电阻、电感等参数重新对算法PI和滑模增益进行调节即可。