


 下载:
下载:
-
鉴于神经网络良好的自适应学习能力、智能性及联想存储能力,近年来在组合优化、图像处理和安全通信[1-2]等多个方面得到了广泛应用.随着研究的不断深入,学者们发现实值神经元的存储能力是有限的,很难完成对高维信息的存储和处理,如对称性检测问题和XoR问题[3].基于此,有研究人员将实值连接权重及实值激活函数推广至复数域,建立了复值神经网络[4-6].2009年,Amin等[7]通过实验进一步证明了单层复值神经网络能够表现出与多层实值网络相当或者更高的性能.目前,复值神经网络在图像传输、设计信号过滤器、交通信号控制等方面发挥着重要的作用[8-10].另外,为刻画生物神经元或组织之间的交互作用,由多个神经网络交互而成的耦合神经网络被提出,并被广泛应用于目标识别、噪声抑制、压缩编码、边缘检测等实际问题中.
耦合神经网络不仅具备人工神经网络的性能,往往还会演化出比单一神经网络更为复杂的动态行为[11].作为一种典型的动力学演化行为,耦合神经网络的同步近年来得到了广泛关注[11-12].Liu等[13]针对一类具有固定连通拓扑的耦合神经网络,利用线性矩阵不等式的方法导出了耦合网络实现指数同步的判定准则.自此,结合饱和控制、事件触发牵制控制等控制方法,具有固定连通拓扑的耦合神经网络同步问题被大量研究,得到了许多有意义的同步研究成果[14].
值得注意的是,在网络节点通讯过程中通信带宽限制、信道突发故障等因素经常导致网络之间的连接出现中断或切换到另一频率信道的现象,表明节点之间并不总是在任意时刻都进行信息交互,网络的拓扑结构也不再是固定连通的.因此,在通讯信号不连续、通讯拓扑不连通的情况下讨论耦合神经网络的同步更具有实际意义.2016年Chen等[15]提出一类具有不连通拓扑的切换机制,并分析了复杂网络的渐近同步行为,该耦合机制仅要求网络节点之间的信息在某些离散时刻进行通讯,并允许每次切换拓扑可以是不连通的.基于此,2021年Chen等[16]结合脉冲耦合机制和事件触发控制,研究了耦合神经网络的同步问题.但这些工作主要是围绕实值网络展开讨论,对具有更强存储能力和更高效信号处理能力的耦合复值神经网络,如何深入探讨其在脉冲耦合机制下的同步仍是一个亟待解决的难题.
基于上述讨论,本文探讨一类脉冲耦合复值神经网络的全局渐近同步问题. 主要贡献包括:①相较于以往的连续耦合神经网络[13-14]和实值切换耦合神经网络[15-16],本文运用图的序列连通性和Dirac脉冲函数,提出了一类依赖于节点复值状态的脉冲耦合机制,它不仅具有更强的信息存储能力和更高效的信息处理能力,还去除了以往研究中需要网络拓扑结构固定连通的限制性条件,仅需网络节点在序列连通条件下的某些离散时刻进行信息通讯即可. ②本文采用直接误差方法来讨论耦合神经网络的渐近同步,有效避免了实际问题中同步态未知或同步态不可微带来的分析困难. 理论结果和数值模拟表明,当网络节点之间出现通讯间断或信道更新等不连续通讯时,适当调整网络切换顺序或节点耦合权重也能够实现整个网络的同步.
全文HTML
-
在本文中,
$\mathbb{Z}$ +,$\mathbb{R}$ ,$\mathbb{R}$ n,$\mathbb{C}$ n和$\mathbb{C}$ n×n分别表示正整数集,实数集,n维实向量空间,n维复向量空间及n×n复矩阵空间. En表示n×n维单位矩阵,对一个正整数N,记集合$\vec N$ ={1,2,…,N}. 对任意的x∈$\mathbb{C}$ n,xH表示x的共轭转置,$\left\| \mathit{\boldsymbol{x}} \right\| = \sqrt {{\mathit{\boldsymbol{x}}^{\rm{H}}}\mathit{\boldsymbol{x}}} $ .$\mathbb{G}$ =(V,ε)表示由点集V={1,2,…,N}和边集ε∈V×V构成的图. 对任意两个节点l,k∈V,(l,k)∈ε表示节点l与k之间的无向连边. {Gk}k=1T是T个$\mathbb{G}$ 均含有N个节点的子图构成的图序列. -
考虑由N个复值神经网络构成的复杂网络系统,其模型描述为:
式(1)中xi(t)=(xi1(t),xi2(t),…,xin(t))T∈
$\mathbb{C}$ n表示第i个神经网络的状态向量,对角矩阵A∈$\mathbb{C}$ n×n表示神经网络的自抑制矩阵,f(xi(t))=(f1(xi1(t)),f2(xi2(t)),…,fn(xin(t)))T∈$\mathbb{C}$ n表示神经网络的激活函数,D∈$\mathbb{C}$ n×n表示神经网络内部连接权重矩阵,I(t)是n维的外部输入向量值函数,Ui(t)刻画了网络节点之间的脉冲耦合机制,其具体形式为:式(2)中tk表示脉冲时刻满足0 < γ1 < tk+1-tk < γ2,δ(·)是Dirac脉冲函数,实矩阵Ωk=(ωij(tk))N×N∈
$\mathbb{R}$ N×N表示tk时刻切换拓扑对应的邻接矩阵,对任意i,j∈V,若存在(i,j)∈ε,那么ωij(tk)>0,否则ωij(tk)=0. 另外,记Gk为tk时刻的网络拓扑,$\mathop {\lim }\limits_{t \to t\bar k} {\mathit{\boldsymbol{x}}_i}(t) = {\mathit{\boldsymbol{x}}_i}\left({{t_k}} \right)$ .利用Dirac函数性质,式(1)转化为如下脉冲微分系统
令
则式(3)转化为:
下面给出一些相关的定义、假设和引理.
定义1 对图
$\mathbb{G}$ =(V,ε)及非空点集L⊆V,称集合$\mathbb{N}$ ($\mathbb{G}$ ,L)={k∈V\L|∃l∈L,(l,k)∈ε}为点集L在图$\mathbb{G}$ 中的邻居节点集.定义2 对图序列{Gk}k=1T,若∪k=1TGk中包含图
$\mathbb{G}$ 的一个生成树,则称图序列{Gk}k=1T是节点连通的.定义3[17] 对给定图序列{Gk}k=1T,若存在一个节点l∈V使得Vk≤Vk-1∪
$\mathbb{N}$ (Gk,Vk-1),其中V0={l},VT=V,则称图序列{Gk}k=1T是序列连通的.定义4 对任意i,p∈V,若
$\mathop {\lim }\limits_{t \to + \infty } \left\| {{\mathit{\boldsymbol{x}}_i}(t) - {\mathit{\boldsymbol{x}}_p}(t)} \right\| = 0$ ,则称耦合神经网络式(1)是全局渐近同步的.定义5[18] 对给定向量Q=(x1x2,…,xn)∈
$\mathbb{R}$ n,称conv(Q)={∑i=1mαixi:∑i=1mαi=1,αi≥0,m≥1}为向量Q的凸包.假设1 对任意k∈
$\mathbb{Z}$ +,当i≠j时,0≤ωij(tk) < 1,并且0≤∑j=1,j≠iNωij(tk) < 1.假设2 对任意x,y∈
$\mathbb{C}$ n,存在正常数$\mathscr{L}$ 使得‖f(x)-f(y)‖≤ L ‖x-y‖.引理1[17] 若对任意l∈
$\mathbb{Z}$ +,图序列{Gk}k=(l-1)T+1lT是节点连通的,那么图序列{Gk}k=1(N-1)2T是序列连通的.引理2[17] 设x∈I⊆
$\mathbb{R}$ ,常数a≤b,则函数f(x)=ax+(1-x)b在${x^*} = \mathop {\min }\limits_{x \in I} \{ x\} $ 处取得最大值.
1.1. 符号说明
1.2. 模型描述
-
为方便证明,首先引入如下记号.
定理1 基于假设1、假设2,如果存在正整数T使得对任意l≥0,图序列{Gk}lT+1(l+1)T是序列连通的,并且
那么,脉冲耦合复值神经网络式(1)是全局渐近同步的.
证 第一步:证明φ(tk+)≤φ(tk).
对任意i∈V,由假设1可知
因此,由i的任意性可知Φ(tk+)⊆Φ(tk),从而可得φ(tk+)≤φ(tk).
第二步:证明对任意的k∈
$ \mathbb{Z} $ +,$\varphi \left({{t_k}} \right) \le {{\rm{e}}^{\frac{{\tilde \delta }}{2}\gamma }}\varphi \left({t_{k - 1}^ + } \right), {\varphi _k} \le {{\rm{e}}^{\frac{{\tilde \delta }}{2}\gamma }}{\hat \varphi _{k - 1}}$ .当t∈(tk-1,tk]时,对任意i,p∈V,定义eip(t)=xi(t)-xp(t),由式(4)可知
其中
$\mathit{\boldsymbol{\tilde f}}\left({{\mathit{\boldsymbol{e}}_{ip}}(t)} \right) = \mathit{\boldsymbol{f}}\left({{\mathit{\boldsymbol{x}}_i}(t)} \right) - \mathit{\boldsymbol{f}}\left({{\mathit{\boldsymbol{x}}_p}(t)} \right)$ .由假设2可得从而有
由节点i,p的任意性可得
第三步:证明若图序列{Gk}k=1T是序列连通的,则
$\varphi \left({{t_{T + 1}}} \right) \le {{\rm{e}}^{\frac{{\bar \delta }}{2}\gamma T}}\left({1 - \prod_{s = 1}^T \alpha \left({{t_s}} \right)} \right)\varphi \left({{t_1}} \right)$ .结合式(4)和定义3可知,对任意i∈Vk,
由于
$\mathop {\max }\limits_{j \in {V_{k - 1}}} \left\{ {\left\| {{\mathit{\boldsymbol{x}}_j}\left({{t_k}} \right)} \right\|} \right\} \le \mathop {\max }\limits_{j \in V} \left\{ {\left\| {{\mathit{\boldsymbol{x}}_j}\left({{t_k}} \right)} \right\|} \right\}$ ,根据引理2可知因此,
${\mathit{\hat \Phi }_k} \subseteq \alpha \left({{t_k}} \right){\mathit{\Phi }_k} + \left({1 - \alpha \left({{t_k}} \right)} \right)\mathit{\Phi }\left({{t_k}} \right), {\hat \varphi _k} \le \alpha \left({{t_k}} \right){\varphi _k} + \left({1 - \alpha \left({{t_k}} \right)} \right)\varphi \left({{t_k}} \right)$ . 另外,结合第一步和第二步不难得到:${\varphi _k} \le {{\rm{e}}^{\frac{{\tilde \delta }}{2}\gamma }}{\hat \varphi _{k - 1}}, \varphi \left({{t_k}} \right) \le {{\rm{e}}^{\frac{{\tilde \delta }}{2}\gamma }}\varphi \left({t_{k - 1}^ + } \right) \le {{\rm{e}}^{\frac{{\tilde \delta }}{2}\gamma }}\varphi \left({{t_{k - 1}}} \right)$ .因此,逐次迭代可得由V0是孤立节点集和VT=V可知
结合第二步可得
所以
由定理条件和式(7)可知,
$\mathop {\lim }\limits_{l \to \infty } \varphi \left({{t_{lT + 1}}} \right) = 0$ ,从而耦合神经网络式(1)是全局渐近同步的.注1 当∏s=1Tα(ts)=1时,虽然式(5)仍然成立,但在该条件下∑j=1,j≠iNωij(tk)≥1,这与假设1矛盾,并且由式(7)可知,此时无法得到网络的渐近同步性.因此0 < 1-∏s=1Tα(ts) < 1.
推论1 基于假设1、假设2,如果存在正整数T使得对任意l≥0,图序列{Gk}k=lT+1(l+1)T是节点连通的,并且
那么耦合复值神经网络式(1)是全局渐近同步的.
注2 在定理1中,不连续脉冲切换拓扑下的序列连通性可解释为:t0时刻某一复值神经网络节点V0接收到外来信息,在t1时刻拓扑结构切换为G1,V0在G1中将信息传递给邻居节点
$\mathbb{N}$ (G1,V0),此时信息遍历的节点集为V1=V0∪$\mathbb{N}$ (G1,V0).随后,在t2时刻拓扑结构切换为G2,V1中的节点在G2中将信息传递给邻居$\mathbb{N}$ (G2,V1),此时V2=V1∪$\mathbb{N}$ (G2,V1). 以此类推,在tT时刻拓扑结构切换第T次时,VT-1在GT中与其邻居$\mathbb{N}$ (GT,VT-1) 交换信息,此时VT=VT-1∪$\mathbb{N}$ (GT,VT-1)=V,通过T次切换实现了整个网络的信息遍历,但每次切换的网络拓扑并不总是连通的.注3 与文献[14-18]讨论的实值耦合神经网络相比,本文研究的脉冲耦合复值神经网络具有更强的信息存储能力和更高效的信息处理能力.在研究方法上,与传统的Lyapunov方法不同,本文主要运用直接误差方法和凸组合技巧来分析耦合网络的同步,理论分析和判定条件更简洁直观.
-
考虑6个具有双复值神经元的神经网络耦合而成的复杂网络,其模型为:
式(8)中xi(t)∈
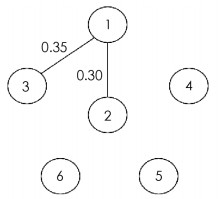
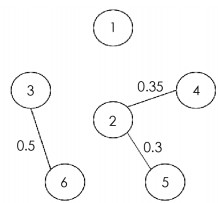
$\mathbb{C}$ 2,Ui(t)为脉冲耦合策略式(2),f(xi)=(0.7tanh(xi1(t)),0.7tanh(xi2(t)))T耦合网络式(8)的脉冲拓扑切换图序列如图 1和图 2所示,这里V0={1},V1={1,2,3},V2={1,2,3,4,5,6}.由定义3可知,该图序列是序列连通的,且T=2.
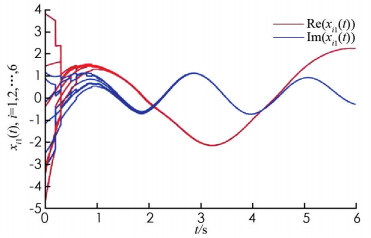
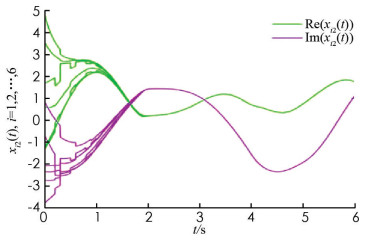
显然,
$\alpha \left({{t_{2k - 1}}} \right) = \mathop {\min }\limits_{1 \le i \le 6} \left\{ {\sum\limits_{j \in {V_1}} {\rm{ }} {{\tilde \omega }_{ij}}\left({{t_{2k - 1}}} \right)} \right\} = 0.3, \alpha \left({{t_{2k}}} \right) = \mathop {\min }\limits_{1 \le i \le 6} \left\{ {\sum\limits_{j \in {V_2}} {\rm{ }} {{\tilde \omega }_{ij}}\left({{t_{2k}}} \right)} \right\} = 0.3$ .通过计算,$\mathscr{L}$ =0.7,$\tilde \delta $ =0.464 1.对任意的k∈$\mathbb{Z}$ +,取0 < tk-tk-1≤0.2=γ,那么$\left({1 - \prod_{s = 1}^T \alpha \left({{t_s}} \right)} \right) \times {{\rm{e}}^{\frac{{\tilde \delta }}{2}\gamma T}} = 0.7822 < 1$ . 由定理1可知,耦合网络式(8)是全局渐近同步的,同步模拟结果如图 3和图 4所示.
-
本文研究了由复值神经网络通过脉冲耦合构成的复杂动态网络的渐近同步问题. 不同于以往的连续耦合机制,该网络节点仅在脉冲时刻进行信息交换和拓扑结构的切换. 在序列连通条件下,基于直接误差法及迭代的思想建立了脉冲耦合复值神经网络渐近同步的判定条件. 结果表明在网络耦合中出现不连续通讯时,对节点通讯进行适当地限制也能实现网络的渐近同步. 在以后的工作中,将探讨在脉冲耦合机制下具有随机切换拓扑的脉冲耦合网络的同步问题.