


 下载:
下载:
-
经过半个多世纪的发展,线性二次最优控制问题(LQ问题)被广泛研究[1-2]. 但是,已有的结果大多是系统的状态和控制都不带有任何约束,同时现有的算法的收敛速度也鲜有涉及. 近期,文献[3]考虑了带终端约束的随机系统的LQ问题,研究了该问题的可解性问题. 本文是在文献[3-4]的基础上研究一类带有终端约束的确定系统的LQ问题,并给出了数值计算方法,最后通过具体例子验证了数值方法的有效性.
全文HTML
-
本文考虑以下状态方程:
性能指标为
其中:T>0,A∈
${\mathbb{R}}$ n×n,B∈${\mathbb{R}}$ n×m,Q∈${\mathbb{R}}$ n×n,R∈${\mathbb{R}}$ m×m.经典的LQ问题为:对于受控系统(1),在平方可积的控制函数空间中,寻找最优控制,极小化二次性能指标J(·). 但在实际问题中,控制函数通常带有一定的约束. 本文中考虑使得系统状态达到特定目标的控制集,即状态带有终端约束的LQ问题. 对于状态的预期目标xT∈
${\mathbb{R}}$ n,定义控制函数类带终端约束的LQ问题(简记为CLQ问题)描述如下:
对于给定的x0,xT∈${\mathbb{R}}$n,寻找控制u*(·)∈U,使得
如果满足(2)式的u*(·)存在,则其被称为CLQ问题的最优控制,相应的状态x*(·): = x(·;x0,u*(·))被称为最优状态,(x*(·),u*(·))被称为最优对. 上述问题称为带有终端约束的线性二次最优控制问题(简称为CLQ问题).
为了保证控制集U的非空性和CLQ问题的可解性,我们在本工作中作如下假设:
(A) 系统(1)在区间[0,T]上精确能控,即Rank(B,AB,…,An-1B)=n;Q为半正定矩阵,R为正定矩阵.
引理1 系统(1)在[0,T]上精确能控的充要条件为系统(1)的Gram矩阵Ψ(0,T)可逆,其中
Φ(·)满足
-
采用拉格朗日乘子法,我们首先将CLQ问题转化为无约束的LQ问题. 引入拉格朗日泛函:
其中x(T):=x(T;x0,u(·))为系统(1)的状态在t=T处的值. 对于给定的λ,无约束的LQ问题即(LQ)λ问题为:
对于给定的λ,x0∈
${\mathbb{R}}$ n,寻找u*λ(·)∈L2(0,T;${\mathbb{R}}$ m)使得如果对于某些参数λ∈
${\mathbb{R}}$ n,(LQ)λ问题的最优控制uλ*(·)对应的系统(1)的状态满足条件那么我们可以证明uλ*(·)也是CLQ问题的最优控制.
引理2 若(xλ*(·),uλ*(·))为(LQ)λ问题的最优对,且满足xλ*(T)=xT,则(xλ*(·),uλ*(·))也是CLQ问题的最优对.
证 因为uλ*(·)为(LQ)λ问题的最优控制,所以对任意的u(·)∈L2(0,T;
${\mathbb{R}}$ m),满足x(T;x0,u(·))=xT,有由此可得J(uλ*(·))≤J(u(·)),即uλ*(·)为CLQ问题的最优控制. 证毕.
利用引理2,求解CLQ问题的最优控制,就可以转化为求解如下两个子问题:
(1) (LQ)λ问题的最优控制问题;
(2) 选择特定的参数λ*∈
${\mathbb{R}}$ n,使得(LQ)λ*问题的最优状态满足xλ**(T): = x(T;x0,u(·))=xT.对于(LQ)λ问题的可解性,有如下定理.
定理1 基于假设(A),对任意的λ∈
${\mathbb{R}}$ n,(LQ)λ问题唯一可解,并且uλ*(·)是(LQ)λ问题的最优控制当且仅当(xλ*(·),yλ*(·))满足如下耦合的正倒向方程:证 (LQ)λ问题唯一可解性可以用文献[1]第七章定理2.1的方法得到. 现在证明定理的剩余部分.
(必要性)若uλ*(·)是(LQ)λ问题的最优控制,那么对任意的ε∈
${\mathbb{R}}$ ,性能指标满足:我们记
由系统(1)的线性特征,可得xε(·)=xλ*(·)+εx0(·). 这样
由ε的任意性,可得
另一方面,由方程组(4)容易得到
两边积分,从而
由(5)式和(6)式可得
又由u(·)的任意性,得到
(充分性) 若(xλ*(·),yλ*(·))满足方程组(4),那么对任意的u(·)∈L2(0,T;
${\mathbb{R}}$ m),结合(6)式,可知(5)式成立. 展开Jλ(uλ*(·)+εu(·))并利用(5)式,可推出
因此,uλ*(·)是(LQ)λ问题的最优控制. 证毕.
定理1给出了最优控制的开环表示,而在应用中,人们更希望给出闭环表示,即状态反馈形式. 接下来,我们就研究CLQ问题的闭环表示. 我们引入Riccati方程:
和两个常微分方程(简称ODE):
关于方程(7),(8),(9)的适定性,读者可以参考文献[1, 5].
引理3 方程(7)存在唯一的解P(·)∈C([0,T];S+n);方程(8),(9)分别存在唯一的解φ(·),yλ(·)∈C([0,T];
${\mathbb{R}}$ n),其中S+n表示n阶的半正定矩阵集.定理2 对任意的λ∈
${\mathbb{R}}$ n,(LQ)λ问题的唯一最优对(xλ*(·),uλ*(·))有如下表示其中φ(·),yλ(·)分别是方程(8),(9)的解.
证 设x(·)是如下ODE的解
其中uλ*(·)=R-1BTyλ(·). 由定理1知,只需要方程(9)的解也满足方程
即可得uλ*(·)是(LQ)λ问题的最优控制. 为证方程(9)的解也满足方程(11),构造
利用方程(7)-(9),我们可以得到
且
$\hat {\boldsymbol{x}}$ (0)=P(0)yλ(0)+φ(0)=Onyλ(0)+x0=x0. 所以$\hat {\boldsymbol{x}}$ (·)为方程(10)的解,由方程(10)解的唯一性知x(·)=$\hat {\boldsymbol{x}}$ (·)=P(·)yλ(·)+φ(·). 再次由方程解的唯一性得yλ(·)=y(·),因此结论成立. 证毕.下面引入辅助系统
其中:
$\hat {\boldsymbol{A}}$ (·)=A-P(·)Q,$\hat {\boldsymbol{B}}$ (·)=(${\boldsymbol{BR}}^{-\frac{1}{2}}$ ,P(·)${\boldsymbol{Q}}^{\frac{1}{2}}$ ).引理4 系统(12)在[0,T]上精确能控的充要条件是系统(1)在[0,T]上精确能控.
证 设x(T;x0,u(·))=xT,令
$\hat{\boldsymbol{u}}(\bullet)=\left(\begin{array}{l} \boldsymbol{R}^{\frac{1}{2}} \boldsymbol{u}(\bullet) \\ \boldsymbol{Q}^{\frac{1}{2}} \boldsymbol{x}(\bullet) \end{array}\right)$ ,则系统(12)表示为:易知x(·)满足该方程,再由该方程解的唯一性,知
$\hat {\boldsymbol{x}}$ (·)=x(·),从而$\hat {\boldsymbol{x}}$ (T;x0,$\hat {\boldsymbol{u}}$ (·))=xT,即得系统(12)精确能控等价于系统(1)精确能控. 证毕.通过引入
则系统(12)的Gram矩阵为
$\hat {\mathit{\pmb{Ψ}}}$ (0,T)=$\int_0^T \hat {\mathit{\pmb{Φ}}}(s) \hat {\boldsymbol{B}}(s)\hat {\boldsymbol{B}^{{\rm{T}}}}(s) \hat {\mathit{\pmb{Φ}}}^{{\rm{T}}}(s)$ ds. 由系统(1)能控性的假设和引理4,可知$\hat {\mathit{\pmb{Ψ}}}$ (0,T)可逆. 现在通过$\hat {\mathit{\pmb{Ψ}}}$ (0,T)的可逆性来研究P(T)的可逆性.引理5 P(T)是正定矩阵.
证 由P(·),
$\hat {\mathit{\pmb{Φ}}}$ (·)满足的方程,直接计算知,进一步对两边在[0,T]上积分,有
从而
由
$\hat {\mathit{\pmb{Ψ}}}$ (0,T)=$\int_{0}^{T} \hat{{\mathit{\pmb{Φ}}}}(s) \hat{\boldsymbol{B}}(s) \hat{\boldsymbol{B}}^{\mathrm{T}}(s) \hat{{\mathit{\pmb{Φ}}}}^{\mathrm{T}}(s) \mathrm{d} s$ 可知其半正定,且$\hat {\mathit{\pmb{Ψ}}}$ (0,T)可逆,故$\hat {\mathit{\pmb{Ψ}}}$ (0,T)正定. 最后,由$\hat {\mathit{\pmb{Ψ}}}$ (0,T)正定以及$\hat {\mathit{\pmb{Ψ}}}$ (T)可逆可得P(T)是正定矩阵. 证毕.现在我们可以综合前面的结果,得到CLQ问题的可解性.
定理3 (LQ)λ*问题的最优控制uλ*(·)是CLQ问题的最优控制,其中λ*=P-1(T)(φ(T)-xT).
证 由引理5知P(T)可逆,从而λ*存在. 由定理2知,对(LQ)λ*问题的最优状态xλ**(·),有
最后由引理2知,uλ*(·)是CLQ问题的最优控制,即得结论. 证毕.
-
根据定理3,可以得到CLQ问题的基于状态反馈的最优对的计算方法. 具体计算步骤如下:
1) 选取最优参数λ*.
① 解得Riccati方程(7)和ODE(8)的解P(·),φ(·).
② 求解最优参数λ*=P-1(T)(φ(T)-xT).
2) 解得最优参数λ*所对应ODE(9)的解yλ*(·).
3) 求解最优对(xλ**(·),uλ**(·)):
现在,我们通过一个具体的例子,利用上述计算方法,得到CLQ问题的最优对.
例1 考虑CLQ问题,其中T=1,x0=0,A=1,B=1,xT=1,Q=1,R=
$\frac{1}{3}$ .解:将条件数据代入Riccati方程(7)得其精确解为
由ODE(8)解得
进而可以计算最优参数:
再由ODE(9)解得
最后可以计算最优对为
由例1可知,即便对于1维系统,要求解CLQ问题仍然十分复杂,这就促使我们研究上述计算方法的数值算法. 接下来我们上述的计算方法给出数值计算的版本,首先将时间区间[0,T]均分为N份,即有
其中ti=
$\frac{T}{N}$ N =:iτ,i=0,1,…,N. 下面列出的是基于状态反馈的CLQ问题的数值算法.CLQ问题数值算法:
1) 分解半正定矩阵为Q=Q0TΛQ0,其中Q0为n阶正交矩阵,
定义
2) 选取最优参数λ*的近似值λ.
① 求解Riccati方程(7)如下:
采用Euler方法求解ODE(8),得到其数值解φi,i=0,1,…,N.
② 求解近似最优参数λ
3) 利用Euler方法求解近似最优参数λ所对应ODE(9),得到其数值解yi,i=0,1,…,N.
4) 求解近似最优对(xi,ui),i=0,1,…,N:
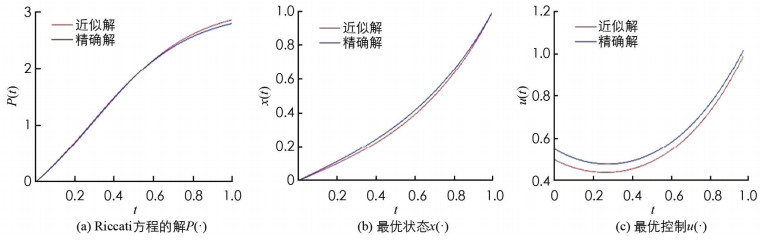
取N=25,用数值算法得到例1的数值解,和精确解的比较见图 1.
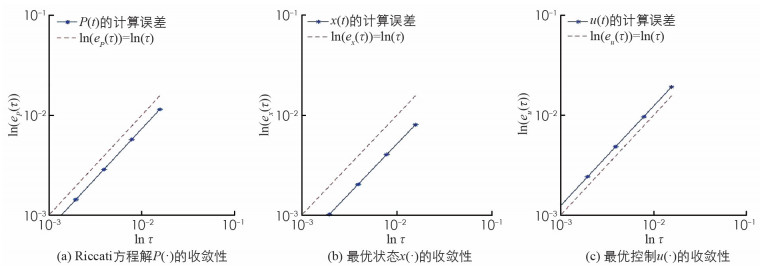
为验证算法的收敛性,对于Riccati方程,定义其误差和步长的关系为:
$e_{{\boldsymbol{P}}}(\tau)=\frac{1}{N+1} \sum\limits_{i=0}^{N}\left|\boldsymbol{P}_{i}-\boldsymbol{P}\left(t_{i}\right)\right|$ ,其中P(·)为Riccati方程的精确解,P·为近似解. 类似地定义ex(τ),eu(τ). 图 2展示了算法的收敛性,从图 2中可看出算法的收敛速度能够达到一阶.
-
本文利用参数选择的方法对带有终端约束的LQ问题给出了可解性的理论结果,同时基于最优控制的闭环表示给出了计算最优对的数值算法. 与基于开环表示的确定/随机系统的LQ问题算法相比,本文算法的优势在于:避免了条件数学期望的计算,避免使用梯度下降法等算法[6-10],从而大大减少了计算量.