


 下载:
下载:






-
开放科学(资源服务)标识码(OSID):

-
我国是世界上柑橘种植第一大国,柑橘品质的好坏受田间管理的影响较为明显,果园病虫害防治是保证柑橘品质的重要手段。果园病虫害防治的主要措施是化学喷施,喷施次数为每年8~15次,约占到果园工作量的30%。传统病虫害防治方式多为对果树的连续无差别施药,农药利用率仅为20%~30%,造成环境污染和果品农残超标严重。对果园进行高质量施药既可保证果品品质和产量,也可降低施药成本。
西方发达国家对于果园自动化喷药研究较早,但主要集中于机器结构设计和参数优化方面。近年来,国内外学者针对果树喷药的研究已不局限于系统结构设计,变量喷雾、风场分析以及冠层检测等已成为热门研究方向,无人机喷药技术也在逐步推广[1-14]。Lešnik等[15]对微喷的喷雾效果进行研究,对比分析轴向和径向喷雾、粗轴和细轴喷雾、雾滴大小以及行进速度4组变量对微喷喷药的影响。Miranda-Fuentes等[16]针对密植型橄榄园设计了一种新型风送式喷药装置,所设计的鸭嘴式出风口风速柔和,雾滴均匀性较好,但动能较低。随着无人机喷药技术在果园喷药领域得到应用,美国Adapco公司研发的Wingman GX型无人机、日本YAMAHA公司研发的R-MAX型无人机已被广泛应用于大规模种植园中进行喷药作业,与地面作业相比喷药效率大幅提升,但仍属于无差别粗放型喷药[17-19]。长期以来,由于受丘陵山地地形的限制,我国在果树自动化喷药方面仍以背负式喷药器的应用为主。但随着先进传感器与控制技术的引入,我国在果园喷药领域的研究成果已逐步进入世界先进行列。Cai等[20]将激光扫描系统集成到风送式喷药机上,根据冠层网格体积和行进速度来控制喷雾输出,通过量化树冠内喷雾覆盖的均匀性,评估了不同网格尺寸和行进速度对喷雾性能的影响。万鹏龙等[21]使用风送式喷雾机与传统管道喷雾对荔枝园进行喷雾对比作业,结果表明风送式喷雾机喷药效率是管道喷雾的4倍以上,节省药液量40%以上。同时在无人机喷药领域,国产品牌大疆生产的MG-1S系列农业植保机以四旋翼直升机为载体,建立了智能规划作业系统和大疆农业管理平台;T60型农业无人机最大载药量为50 kg,实现了果园自动喷药[22-24]。
尽管我国在果园喷药领域的研究水平不断提高,特别是在变量喷雾、自动控制方面取得明显突破,但丘陵山地果园受限于地形、作业条件复杂等原因,果园喷药自动化程度仍然较低[25]。同时,我国在果园病虫害的防治过程中普遍存在着以下问题:农药利用率较低,施药量是发达国家的2~5倍;喷药机具针对性差,难以实现因地制宜;农药以同一剂量无差别喷施为主,忽略了果树冠层形态特征和病虫密度,导致药液浪费以及果园土壤和环境的污染。因此,本研究针对丘陵山地柑橘果园设计了一种自适应果树冠层结构形态的喷药系统,根据果树冠层结构大小自动调节药液管路压力、风速和喷杆位置,实现果园自适应对靶喷药。其中喷药装置为风送式喷药机,通过风送系统提高药液喷施质量并增加喷雾幅宽,整体结构紧凑,工作稳定可靠,以期能满足丘陵山地柑橘果园的喷药作业要求。
全文HTML
-
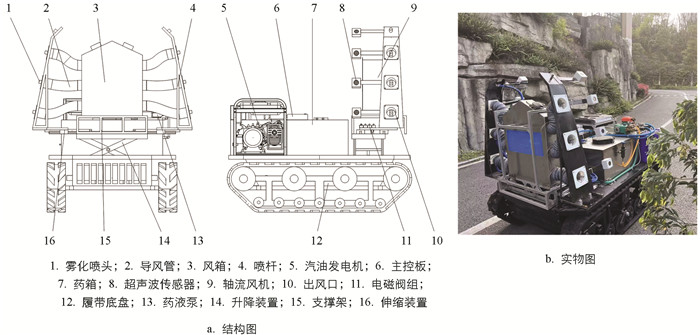
结合丘陵山地柑橘机械化果园的地形特点与喷药的农艺要求,设计了一款适用于丘陵山地柑橘果园的风送式喷药机具(图 1),喷杆高度随果树高度自动调整,喷杆水平位置根据设定的有效喷雾距离自动调整,风送速度与喷雾压力随冠层结构大小自动调整。
喷药机具主要由行进系统、冠层结构信息检测系统、自动对靶系统、液路系统、风送系统以及控制系统组成。其中行进系统采用的定制履带式底盘,由2个2.5 kW的直流无刷电机驱动,采用遥控控制行进速度与方向;冠层结构信息检测系统通过多超声波传感器超前阵列,提前检测冠层的结构大小信息,配合速度传感器对冠层沿行进方向进行纵向圆柱形分割;自动对靶系统分为喷杆伸缩装置与升降装置,分别采用导轨滑块结构与剪叉式结构,可对喷杆的水平与竖直方向进行位置调节,通过与超声波传感器进行配合实现自动对靶功能;喷雾出口压力以及风速根据冠层结构大小自动调整,实现雾滴完全穿透冠层中心。整机采用6.5 kW汽油发电机作为动力源,通过试验验证,喷药机具能满足丘陵山地柑橘果园的作业要求,主要技术参数如表 1所示。
-
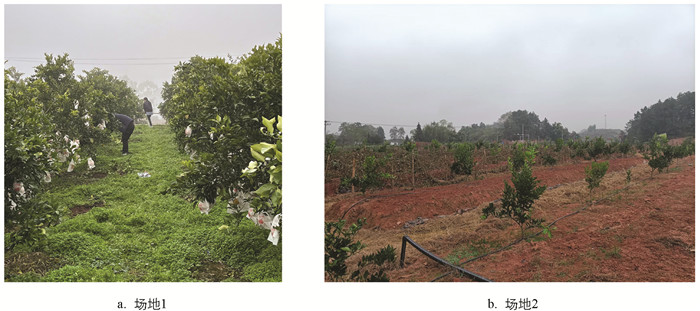
通过对川渝地区多个丘陵山地柑橘果园进行实地调研可知,标准化柑橘果园的果树行距为3~5 m,株距为2.5~3 m,柑橘果树冠层直径为1.5~2.5 m,果树高度为2~3 m。部分果园存在较大的坡度,最大爬坡角度约20°。如图 2所示,为便于排水,设有垄沟,垄沟深度约0.5 m,垄沟宽度为1.5~2 m。根据丘陵山地果园的特征,采用定制履带式底盘(德州正鼎智能设备有限公司)作为行进系统,机具可实现原地转向,且履带与地面接触面积大,可有效减少机具对土壤的破坏,相较于轮式底盘,具有更强的机动性与越障能力。
考虑喷药机具会在垄沟内行走,且垄沟两侧均有堆土影响,因此底盘最大设计宽度为1.25 m,底盘离地高度为0.3 m,具有良好的通过性。设计最大爬坡角度为25°,最大行进速度为1 m/s。根据力学分析可得,喷药机受到的行驶阻力Ff为:
式中:Fr为滚动阻力(N);Fs为喷药机上坡时的坡度阻力(N);Fa为加速行驶产生的惯性阻力(N);m为喷药机满载时的总质量(800 kg);g为重力加速度(9.8 m/s2);η为换算系数(1.1)。考虑到喷药机的作业环境,滚动阻力系数f为0.06,最大爬坡角度θ为25°,最大行驶速度v为1 m/s。当喷药机在坡面上行驶时,产生的惯性阻力Fa显著低于履带运动时的滚动阻力Fr[26],在简化分析时可忽略惯性阻力Fa的影响,因此可得喷药机在爬坡时的最大功率Pc为:
由式(2)可得Pc为3.743 kW,考虑驱动电机效率与传动结构机械效率的影响,因此采用2个2.5 kW直流无刷电机驱动整机行进。考虑野外作业环境以及其余部件功率大小,整机采用6.5 kW汽油发动机作为动力源,从而提高整机的续航时间,可不间断地对大型果园进行喷雾作业。
-
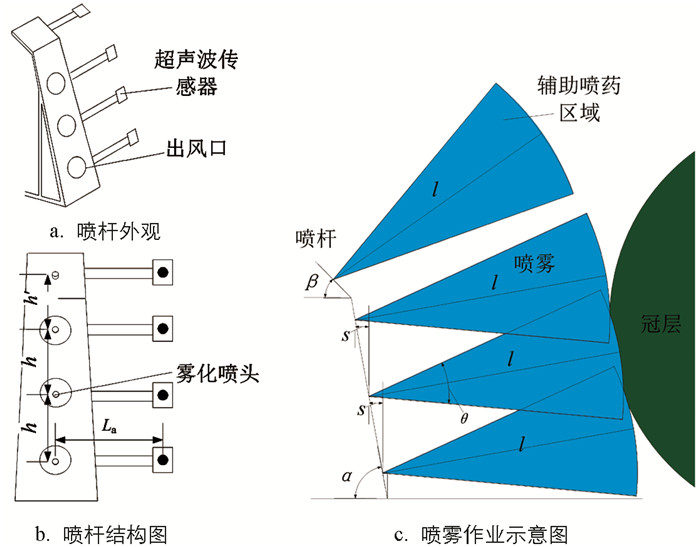
丘陵山地果园路况复杂,道路颠簸,传统直型喷杆的竖直方向尺寸长、强度低,会导致喷杆重心过高,使喷杆摇晃,影响喷雾作业质量。为降低喷杆重心设计了如图 3a所示的异型喷杆,通过设置多段倾角减小喷杆尺寸,通过梯形结构保证喷杆运动过程中的稳定性。喷杆中心为出风口与雾化喷头,从喷头位置沿水平方向超前布置超声波传感器,超前距离为La,如图 3b所示。顶端喷头主要对树冠顶部进行喷施药液,不设计出风口,因此单侧喷杆有3个出风口、4个喷头与4个超声波传感器。
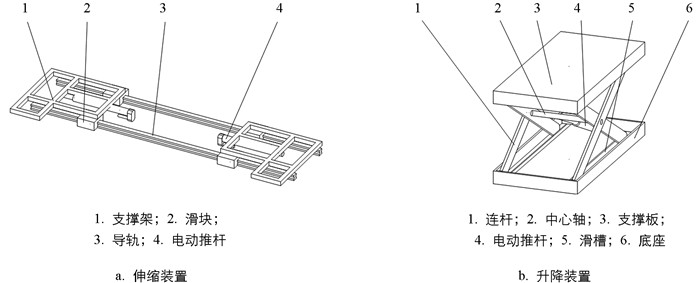
根据果园特点以及喷杆相关参数设计自动对靶系统的最大行程。自动对靶系统包括伸缩与升降2部分:伸缩装置为导轨滑块机构,如图 4a所示,对喷杆的水平位置进行调节;升降装置为剪叉式结构,如图 4b所示,对喷杆的竖直位置进行调节。
通过对喷雾距离进行测试,在关闭风送系统的情况下喷雾在1.5 m左右出现衰减。为保证雾滴到达冠层前仍具有初始动能,故设定喷杆到果树距离为1~1.25 m时进行喷雾,如图 3c所示。根据位置关系可得:
果树最大行距Lmax为5 m,喷杆初始宽度与行进底盘宽度L相同,为1.25 m,喷杆到果树的距离l最大为1.25 m,故求得伸缩装置单边最大行程ls为0.625 m,因此采用最大行程为650 mm的电动推杆作为执行元件。
同时可计算出最大喷雾高度hmax为:
喷头竖直方向间距h、h′分别为0.3 m与0.15 m,喷头沿着喷雾方向的水平距离差s为0.05 m,喷杆到果树的距离l最大为1.25 m,喷雾锥度θ约35°,喷杆的角度参数α、β分别为80°与45°,故求得最大喷雾高度约2.0 m。由于果树最大冠层直径为2.5 m,因此升降机构设计的最大行程为500 mm。
1.1. 喷药机结构设计
1.2. 整机尺寸与动力设计
1.3. 喷杆与自动对靶系统设计
-
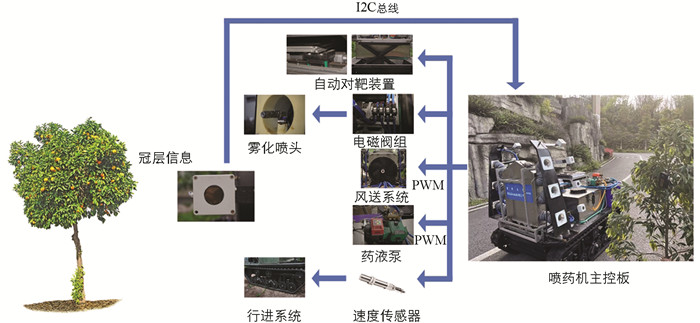
如图 5所示,自适应喷药系统主要由基于STM32F030x8最小系统的喷药机主控板、超声波传感器(KS109,深圳市导向机电技术有限公司)、速度传感器(CYT9100HT,北京天宇恒创传感技术有限公司)、自动对靶系统、电磁阀组(DHLZ11,Darhor Instrument INC)等组成。其中,8个超声波传感器检测到树距离,超声波传感器量程为80~11 000 mm,波束角约15°,检测频率为50 Hz,且该超声波传感器具有杂波抑制功能,通过使用自带的0x74指令将传感器配置为第4级降噪,适用于本研究开关电源供电的场合,能有效保证超声波传感器检测的稳定性与准确性。超声波传感器通过I2C总线与主控板通信,对各超声波传感器进行编号,单侧从上至下分别为l1~l4与l5~l8,通过自动寻址可将各数据分别处理。冠层结构信息检测时由于顶端的l4与l8号传感器倾角不同,对算法精度产生影响,因此仅使用l1~l3与l5~l7号超声波传感器计算得到果树的冠层结构信息。工作时根据冠层结构大小检测反馈值,通过对风机与药液泵进行PWM调速,实现变量喷药。同时自动对靶系统根据所有超声波传感器的检测结果,采用多路电机驱动器,同时调节喷杆的水平与竖直位置,实现自动对靶功能。电磁阀组安装于喷药机的液路系统中,主控板根据超声波传感器的检测结果,配合安装于底盘上的速度传感器,通过多路固态继电器控制喷药的启停。
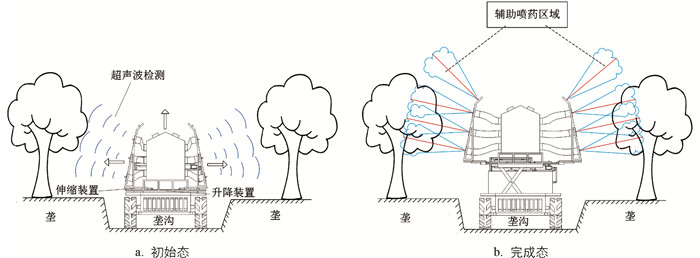
自适应喷药系统工作时,首先喷药机具启动,初始化完成后超声波检测系统进行喷雾距离检测并将距离信号反馈到主控板,主控板根据接收到的距离信息,判断喷雾距离是否符合预设值,再通过喷药机的伸缩装置和升降装置调节喷杆伸缩距离和升降高度,完成自动对靶操作。自动对靶的同时对果树冠层结构大小进行检测与分割,根据果树冠层大小的不同采用不同的喷药策略,以达到完全穿透冠层中心的目的。可根据预设工况权重系数设置高风速与高出口压力2种工作模式进行不同效果的喷雾作业,实现农药的减量增效。具体工作流程如图 6所示。
-
为实现自适应变量喷药,需要对果树的冠层结构信息进行检测。喷药机根据不同的冠层大小,调节管路压力与风速,将雾滴送至冠层中心,双边作业后实现冠层完全覆盖的作业要求,使药液均匀覆盖整个树冠,从而提高防治效果。目前冠层检测装置主要有超声波传感器、激光雷达以及激光传感器3种。激光雷达价格高昂,难以降低农业生产成本;激光传感器受环境影响较大,在果园使用的精准程度不高。现有冠层信息的检测方法,除了采用激光雷达,其余检测方法均需检测整棵果树冠层信息,并通过各类方法提高检测精度,如长方体分割法、不规则三棱柱分割法[27-30],这类方法难以实现实时检测反馈,对实时作业的机具也很难提供作业决策。因此,本研究通过车载超前布置的超声波传感器,对果树冠层沿行进方向进行圆柱形纵向分割,在保证检测精度的同时,实现冠层的提前检测,并根据检测结果对喷雾作业进行决策。
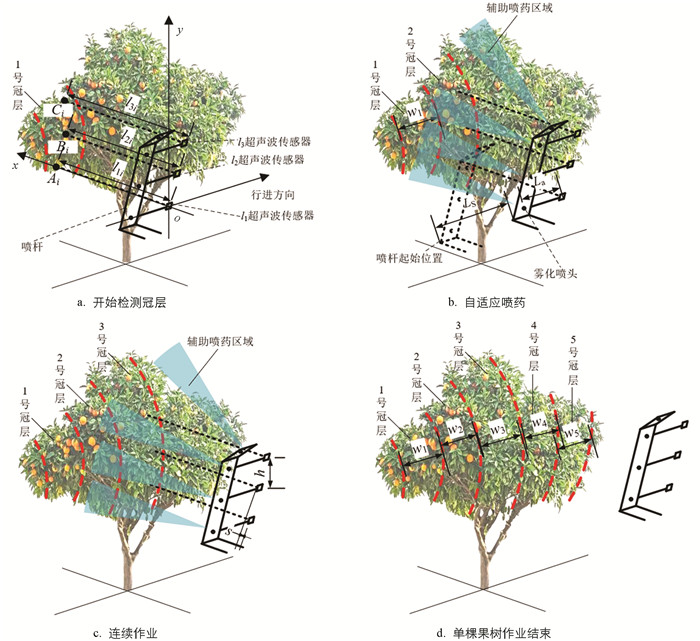
以单侧为例,原理如图 7a所示,从下至上的l1~l3号超声波传感器对冠层结构大小进行检测,各超声波传感器在冠层上检测的对应点分别为Ai、Bi、Ci。l1i、l2i、l3i分别为3个超声波传感器的所测距离,以第1次检测时l1号超声波传感器为原点O,建立直角坐标系,根据各超声波传感器检测值以及各点相对位置,即可得到Ai(xai,yai)、Bi(xbi,ybi)、Ci(xci,yci)坐标值系数矩阵Qi为:
式中:Δx与Δy分别为自动对靶过程中喷杆水平与竖直方向移动距离,初始值为0;s与h分别为2个相邻超声波传感器在x与y方向的距离差值,其中s为0.05 m,h为0.3 m,如图 7c所示。根据圆的标准方程对检测区域进行圆柱拟合:
式中:(xf,yf)为圆心坐标;R为拟合冠层的圆柱半径。由于检测数据存在噪声,采用最小二乘法,通过观测尽可能多的点拟合出较为准确的结果,并通过乘方消除正负方向的差异。因此设k1、k2、k3为:
将式(7)代入式(6)可得:
KS109超声波传感器检测频率为50 Hz,单次检测所得系数矩阵为Qi。为保证检测精度,需要较多数据对检测区域进行圆柱拟合,但检测时间过长也会导致冠层数过少,冠层分割不精细。综合考虑设定超声波传感器0.3 s内对冠层结构信息进行15次检测,将每次检测的各点数据代入式(8)可得:
即:
根据最小二乘法可求得矩阵K为:
通过式(11)求解矩阵K,即可求解得到所检测部分冠层的拟合圆柱半径R为:
速度传感器测定机具行进速度vi。由于速度传感器所测结果为脉冲信号,因此分割出各冠层的宽度wi,即在开始检测第i号冠层到开始检测第i+1号冠层的时间内对行进速度vi进行积分:
如图 7b所示,为保证最大行进速度下可以进行0.3 s的冠层信息检测,则超声波传感器的超前距离La为:
式中:td为自动对靶与冠层信息检测时间(0.3 s);tc为程序计算时间(0.08 s);tj为喷药系统调节时间(0.11 s);vmax为喷药机最大行进速度(1 m/s)。通过式(14)设计La为500 mm。
工作时首先对1号冠层区域进行对靶与冠层结构信息检测,如图 7a所示,计算得到冠层所拟合的圆柱半径R。根据拟合圆柱半径大小确定喷药策略,通过调节风速与管路压力,提高雾滴动能,保证喷雾作业时雾滴穿透该冠层中心。当机具行进距离LS大于La时,根据预设的喷药策略开始对1号冠层进行喷药,同时对2号冠层进行检测,如图 7b所示。当LS大于La与w1之和时,开始对2号冠层进行喷药并检测3号冠层,如图 7c所示。如此连续作业直至完成整棵果树的喷药作业,如图 7d所示。
-
液路系统如图 8所示,采用8个电磁阀控制8个雾化喷头(圣叶牌),每4个为1组对单侧果树进行喷药作业,测试该喷头喷出雾滴的平均体积中值粒径(Volume Median Diameter,VMD)为131.93 μm,符合果园作业要求。液路系统通过药液泵(JD-26,台州市精德机电科技有限公司)与溢流阀(YF-L8H2-S,台州市杰尔铭液压制造有限公司)控制管路压力,自适应喷药时通过PWM调速控制药液泵,调节雾化喷头的出口压力。风送系统采用350 W轴流风机(YWF4E,上海静静风机电有限公司)作为风源,经过风箱与导流管后到达出风口。通过SolidWorks Flow Simulation对风场进行仿真,如图 9所示,最大出口风速为17.806 m/s,但由于喷头在导风管出口有扰流,因此在试验中最大出口风速约13 m/s。
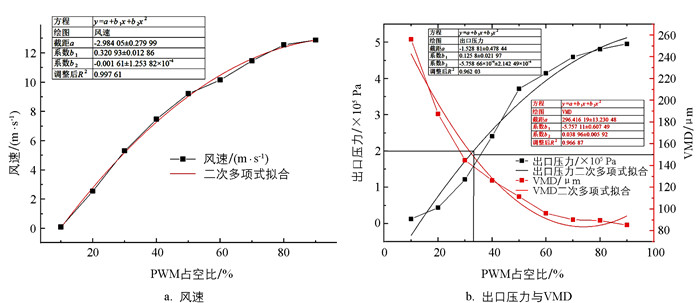
喷药机对不同大小的冠层采取不同喷药策略是通过对风机与药液泵进行PWM调速实现的,因此需要对不同PWM占空比下风机与药液泵所产生的风速与出口压力进行测量。分别设定PWM占空比(频率为10 Hz)依次为10%、20%、30%、40%、50%、60%、70%、80%和90%[31],待系统工作稳定后,测量喷头处的出口风速并取各出风口平均值作为测量值,根据压力计测量出口压力。由于不同出口压力对雾滴粒径会产生影响,因此在测量出口压力的同时,在喷嘴前方有效喷雾距离处放置3张水敏试纸,测量该占空比下的雾滴VMD,试验数据如表 2所示。
通过Origin软件对表 2中的数据进行二次多项式拟合,结果如图 10所示。通过查阅相关文献[32-33]可知,果树生物病虫害喷雾的最佳粒径范围为30~150 μm。根据出口压力与VMD拟合结果可得,药液泵PWM占空比大于35%,出口压力大于2×105 Pa时,可以保证喷雾作业的粒径在标准范围内。
-
自适应喷药系统根据超声波传感器所测冠层半径R的值,对不同半径的冠层采用不同的喷药策略,从而实现完全穿透冠层,并将雾滴送至冠层中心,因此需要通过试验建立风速(x1)、出口压力(x2)与穿透半径(y)之间关系。根据试验数据特点建立多元线性回归方程,试验数据如表 3所示。
由表 3可知,试验次数n为7,因素数m为2,采用最小二乘法求出二元线性回归方程:
式中:a为方程截距;b1、b2分别为2个因素的偏回归系数。通过Origin软件计算可得二元线性回归方程:
通过计算复相关系数对式(16)进行显著性检验,结果为0.967 34,查阅复相关系数临界值Rmin为0.950,证明在0.05的水平回归方程显著性较好。
上述计算过程中式(17)为决定喷药策略的权重计算公式,工作时可调节式(17)中p与q的设定值,在保证冠层穿透相同的情况下,改变风速与出口压力的权重,提高雾滴覆盖率。
-
自动对靶控制原理如图 11所示,通过超声波传感器阵列检测到树距离。水平方向上,通过判断喷头到果树冠层的距离是否在设定范围内来控制作业距离,实现在稀疏果园的株间区域停止作业,在密植果园连续作业;竖直方向上,通过上下超声波传感器的距离值比对,判断果树的冠层结构,调节作业高度,实现自动对靶。
8个超声波传感器通过I2C总线结构与主控板进行通信,该结构具有自动寻址功能,能够将8个超声波传感器检测数据分别存储,检测精度为毫米级,单侧从下到上分别为l1~l4与l5~l8。以单侧为例,水平方向上取LH作为水平方向的参考数据:
根据果园的种植分布,当1 250 mm≤LH≤2 500 mm时,喷杆外伸;当80 mm≤LH<1 000 mm时,喷杆内缩。0~80 mm的范围为检测盲区,此时喷杆保持静止。果园的行距为5 m,因此大于2 500 mm的范围认定为株间空当区域,此时喷杆回到初始位置。
竖直方向上,顶端l4号超声波传感器设计倾角β为45°,在水平对靶为1.25 m时,由几何关系可得l1与l4号超声波传感器所测得区域高度H约2.4 m,与丘陵山地果园冠层直径相近,如图 12所示。由于喷药作业时雾滴会通过重力向下沉积,因此优先考虑冠层上部的喷施,即当l4号超声波传感器检测到冠层顶部时,喷雾能覆盖整个冠层。
竖直方向上取l4作为竖直调节参考依据,在最大冠层直径下,水平对靶为1.25 m时,l4计算值为2 121.3 mm,但由于枝叶的不规则生长,设定范围为2 300~2 500 mm以防止过度调节所产生的振动。
设计的自动对靶调节规则样表如表 4所示。
通过测试,该方案水平调节误差为21.85 mm,误差率为1.696%,竖直调节误差为50.31 mm,误差率为4.573%,对靶效果良好,满足作业要求。
2.1. 总体硬件设计
2.2. 冠层信息检测方法与工作原理
2.3. 液路与风送系统设计
2.4. 多元线性回归设计
2.5. 自动对靶原理与控制
-
为验证自适应喷药系统在实际柑橘果园喷药作业中的效果,以及冠层信息检测的准确度,于2024年1月25日在四川省广安市武胜县福寿家庭农庄进行田间试验,试验现场如图 13a所示。整个试验中平均风速、风向、温度和空气湿度分别为0.71 m/s、东北风向、12 ℃和66%。水敏试纸布置如图 13b所示,水敏试纸布置方案为1~5号水敏试纸沿最大冠层处由外向内等间距分布,测量冠层穿透时各点的雾滴覆盖率;6~9号水敏试纸周向分布,与1号水敏试纸一起表征喷药作业冠层表面的雾滴覆盖率水平。
本试验共进行6组,其中1~3组试验工况设定关系式中的p、q分别为0.25与1,4~6组试验工况设定的p、q分别为0.40与1。试验通过HP Laserjet M1005 MFP扫描采集到的水敏试纸图像,如图 14a所示。通过重庆六六山下植保科技有限公司研发的雾滴分析软件处理得到雾滴覆盖率数据,如表 5所示。为分析沿冠层半径方向的雾滴覆盖率衰减情况,将试验数据绘制成雾滴覆盖率趋势图(仅对1~5号水敏试纸进行对比),如图 14b所示。
雾滴覆盖率是单个水敏试纸测量的指标,而药液覆盖率是指喷雾作业后在作物叶面上覆盖的面积占总叶片面积的百分比,通过对试验获取的水敏试纸按照标准进行分级,进而计算试验的药液覆盖率LC[34]来表征单棵果树的整体喷药效果:
式中:C1、C2、C3、C4分别为药液附着面积占叶片面积0~25%、25%~50%、50%~75%、75%~100%的叶片数量;LC为药液覆盖率;N为叶片总数。通过计算,1~6组试验的药液覆盖率为38.89%,均大于33%,满足行业标准[35]。
每次喷药结束后,测量各冠层被穿透的距离、程序计算的半径以及果树实际冠层半径,多次测量取平均值,所得结果如图 15所示。
由试验结果可知:
1) 在自适应控制系统调节下,5号水敏试纸均有雾滴覆盖,表明自适应喷药能对最大冠层实现完全贯穿。计算表 5中各组数据相对标准偏差,1~3组试验的表层雾滴覆盖率的相对标准偏差为3.02%,4~6组试验为3.38%,表明自适应喷药系统作业稳定,雾滴均匀性较好。
2) 将6组试验1~5号水敏试纸测试值进行对比,雾滴覆盖率随冠层深度而下降,如图 14b所示。1~3组试验提高了风速权重,在较低的出口压力下也能实现冠层的完全穿透,该方案药液量较少,表层与中层雾滴覆盖率较低,在风速影响下,衰减速度较低;4~6组试验提高了出口压力权重,雾滴的初速度变大,在低风速下也可穿透冠层,该方案表层与中层雾滴覆盖率较高,但内层雾滴覆盖率与1~3组试验相近,且低风速下雾滴覆盖率衰减更快,雾滴的动能损失更快。
3) 通过测量多次试验的实际冠层大小、程序计算的冠层半径以及雾滴穿透距离,将结果进行对比,根据结果求得冠层检测最大误差率为12.379%,雾滴穿透最大误差率为5.225%,总体工作质量较好。
-
1) 所研制的丘陵山地柑橘果园喷药机整机尺寸为2 m×1.2 m×1.8 m,整机总动力源为6.5 kW的汽油发动机,药箱容量为500 L,最大爬坡角度为25°,最大行进速度为1 m/s,喷药单边幅宽可达2.5 m,具有自动对靶与自适应喷药功能,满足丘陵山地现代化果园的实际需求,各项参数均满足国家及行业标准。经试验验证,自适应喷药系统喷药作业稳定性好,能实现不同工况下完全穿透冠层的喷药效果,在高风速与高出口压力工况下喷药作业的相对标准偏差分别为3.02%与3.38%,喷雾作业质量较好。
2) 通过试验分析发现,自适应喷药系统在不同工况下均能实现柑橘果树冠层的完全穿透。在高风速低出口压力工况下,节约药液更多,更能提高叶片背面雾滴覆盖率,但表层与中层的雾滴覆盖率较低;在低风速高出口压力工况下,药液消耗增加,雾滴覆盖率显著提升,但叶片背面雾滴覆盖率降低,雾滴动能损失快。实际生产中可根据作业要求,调节工况参数,进行喷雾作业。
综上,本研究研制的丘陵山地柑橘果园自适应喷药系统各项性能良好,能够显著提高果园喷药质量,降低人力成本,符合我国农业现代化、绿色化、智能化的发展理念,可为现代化果园规模化、产业化、工厂化作业提供技术支撑与理论参考。