


 下载:
下载:
-
开放科学(资源服务)标识码(OSID):

-
农业轮胎是农业装备与地面发生相互作用的关键部件,现代农业装备不仅要求农业轮胎具有优异的承载性[1],还要求其具有良好的力学性能、防爆胎性能、耐刺扎性、耐老化性等[2]。同时,不同于传统结构化道路路面,农业装备复杂的作业环境加剧了传统充气轮胎漏气、穿刺、爆胎等安全隐患[3]。随着智能材料和成型技术的不断发展,非充气轮胎技术为农业轮胎的设计提供了新思路。非充气轮胎使用聚合物弹性支撑体或填充物取代充气结构,具有安全防爆、力学性能解耦、制造工艺简单、无需气压维护等优点[4]。
现有研究常将非充气轮胎应用于割草、防土壤板结等特定农业场景,但对非充气轮胎在其他农业工况下的应用还需进一步拓展。固特异公司开发了TurfCommand非充气草坪轮胎[5],该轮胎采用热塑性连接结构,能够在保持平稳行驶的同时减少草皮撕裂。Phromjan等[6]将TWEEL非充气轮胎应用于甘蔗田间机械,通过设计土壤压缩试验并采用有限元方法验证,推导出了接触压力与土体沉降量的关系式,选择具有合适数量和轮辐厚度的非充气轮胎,有助于减少土壤压实,促进甘蔗生长。
支撑体结构可为非充气轮胎提供支撑,并通过其结构形变来减小轮胎所受的振动和冲击[7]。Wu等[8]将梯度反四手结构作为支撑体结构,采用有限元方法研究梯度反四手结构非充气轮胎在压缩载荷下的力学性能,结果表明其具有优异的承载性。Zhang等[9]根据袋鼠下肢结构特点,构建了柔性仿生非充气轮胎,结果表明该轮胎在不同载荷下的径向刚度、横向刚度、纵向刚度、扭转刚度和地面压力均优于充气轮胎。目前,大量关于非充气轮胎的研究集中在柔性支撑体上[10-11],如何使柔性支撑体代替空气功能的同时还能提高轮胎的整体性能,是非充气轮胎设计的关键。负泊松比结构作为一种新型微结构,具备高可设计性、优异的刚强度、良好的吸能特性、抗疲劳特性等优点[12-13],使负泊松比微结构代替充气轮胎的充气部件成为可能,为非充气轮胎支撑体的设计提供了新思路。
双箭头负泊松比微结构(Double-Headed Arrow Cellular Structure with Negative Poisson's Ratio,NPR DACS,后文简称DACS)是通过拓扑优化获得的一种新型负泊松比微结构[14],相较于其他负泊松比结构,其具有优异的能量吸收与承载能力、轻量化与结构稳定的平衡性以及承受复杂载荷的适应性,并且DACS制备工艺相对完善,适合大规模生产。Li等[15]将DACS与复合材料结合,通过理论分析和有限元分析复合双箭头波纹夹芯结构的力学性能,结构的比刚度得到提高。Gao等[16]研究了DACS的力学性能、变形模式和吸能机理,将优化后的DACS应用于车辆吸能装置中。综上,DACS具有三维结构且拓扑结构规则可控制,可作为一种理想的非充气轮胎支撑体结构。
为此,本文提出了一种以DACS为支撑体的非充气轮胎。首先,对DACS开展参数化设计,实现梯度密度分布,并将其作为非充气轮胎支撑体结构,结合轮胎其他关键部件建立双箭头非充气轮胎(Double-Headed Arrow Non-Pneumatic Tire,DANT)的有限元模型。其次,基于Abaqus二次开发建立针对DANT的参数化仿真平台,采用数值模拟方法对DANT开展接地性能、三向刚度、越障和跨越沟渠的仿真分析,探究DANT的静态力学性能和在典型非结构化路面上的动态力学性能。然后,以DANT的径向刚度最大、最大接地应力最小和质量最轻为优化目标,以梯度DACS的结构参数为优化变量,对DANT开展多目标优化设计,以获取具备最优力学性能的DANT结构。最后,试制DANT样胎并将其应用于小型深耕机中,以验证DANT优异的土壤保护性能。
全文HTML
-
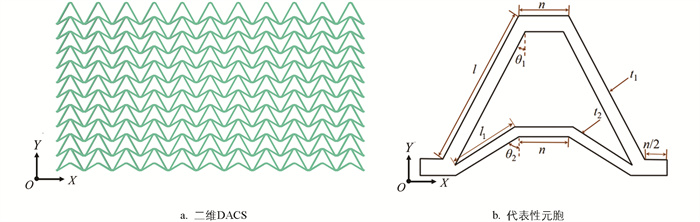
二维DACS及其代表性元胞分别如图 1a和图 1b所示,其中,长元胞壁的长度和短元胞壁的长度分别定义为l和l1,长元胞壁与元胞对称轴之间的夹角为θ1,短元胞壁与元胞对称轴之间的夹角为θ2,t1和t2分别为长元胞壁的宽度和短元胞壁的宽度,n为水平元胞壁长度。
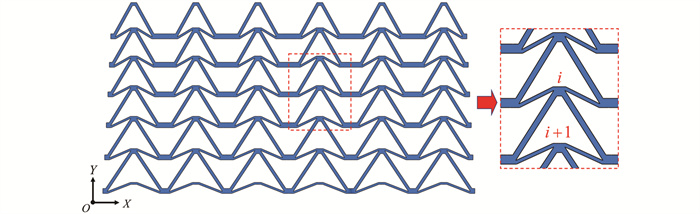
DACS支撑体的离散结构会降低胎面与路面受力的连续性,因此将DACS支撑体结构梯度化,以改善轮胎承载力的均匀性。如图 2所示,通过引入角度梯度因子qθ和长度梯度因子ql来改变Y轴方向上的元胞壁长度和夹角,不同层元胞之间的元胞壁夹角和长度由qθ和ql来调节梯度分布的关系,从而实现结构的梯度设计。qθ和ql分别表示为:
其中:i和i+1为梯度方向上的第i层和第i+1层。
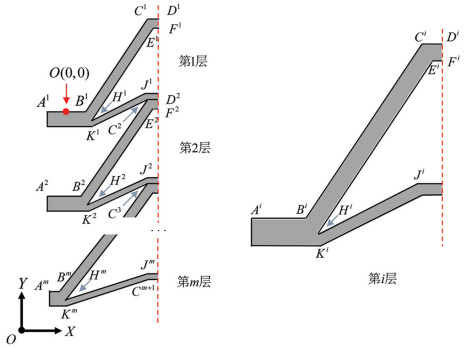
此外,由于梯度DACS的几何参数众多,直接建立以梯度DACS作为支撑体的非充气轮胎有限元模型十分复杂。因此,为了提高建模效率,降低建模时的困难程度,对梯度DACS进行参数设计,基于DACS高度对称的特性,对其单胞结构的二分之一进行平面解析定位。如图 3所示,以第1层距离B1点为n/2的O点为坐标原点建立坐标系,以l、θ1、θ2、t1、t2和n共6个单胞参数建立几何控制坐标。然后,由DACS的几何关系获取第1层单胞结构所有关键点的坐标,再将上述坐标转化为基于Abaqus软件的Python程序,完成第1层单胞的草图绘制。将上述绘制第1层单胞草图的Python命令转化为子函数,并将以长度梯度因子ql和角度梯度因子qθ作为输入参数的式(3)、式(4)写入子函数,通过对应的命令调用子函数完成其他梯度层的草图绘制。
其中:li为第i层长元胞壁长度; θ1i、θ2i分别为第i层长元胞壁及短元胞壁与对称轴的夹角。
利用Python循环指令逐层完成单胞草图绘制后,再利用控制点Ci将每层单胞草图按顺序平移到对应的位置,其中第k层在梯度方向上移动的距离dY表示为:
式中:CYi+1、CYi分别为第i层中Ci+1和Ci的纵坐标。
由此,可得梯度DACS在梯度方向上的高度表达式hY为:
式中:CYm+1为第m层中Cm+1的纵坐标。
-
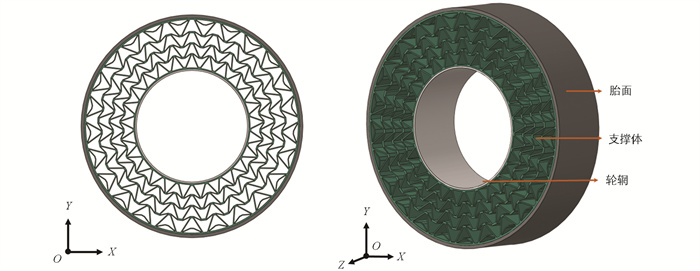
如图 4所示,DANT有限元模型包括轮辋、梯度DACS支撑体结构及胎面3部分。参考标准充气轮胎175/75 R15,将充气部件改为4层的梯度DACS支撑体,梯度DACS支撑体的设计尺寸需满足如下关系:
式中:tj为梯度DACS边缘连接层厚度; ρt为轮胎扁平比; dt为轮胎断面宽度。
根据梯度DACS支撑体排布方式,每层的支撑体数量Cn满足以下关系:
式中:drim为轮辋直径; DX1和DY1分别为定位点D1的横坐标和纵坐标; BX1和BY1分别为定位点B1的横坐标和纵坐标。
同时,为避免梯度DACS支撑体结构与胎面及轮辋发生干涉,其结构参数应满足:
式中:Rt为胎面的内径; Rrim为轮辋的外径。
基于1.1节中梯度DACS参数设计流程,将l作为中间变量,根据迭代关系获得DACS整体高度的代数式,再利用式(9)的等量关系求解出中间变量l,完成DANT的参数设计,并利用上述几何关系编写Python建模程序,完成草图绘制和模型装配。
-
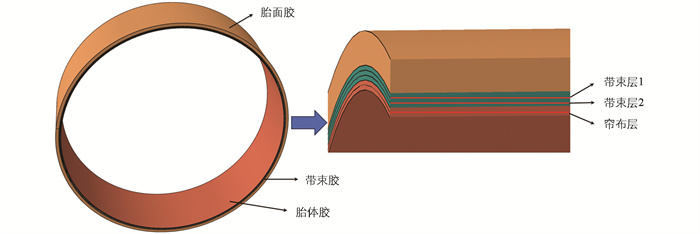
非充气轮胎的胎面和轮辋与充气轮胎的设计标准基本相同。其中,将轮辋简化为环状线弹性结构,材料为铝合金,其密度为2.7×103 kg/m3,弹性模量为7.2×104 MPa,泊松比为0.33。如图 5所示,忽略结构胎肩、胎冠花纹等次要因素,将胎面简化为由胎面胶、带束胶、胎体胶、带束层和帘布层组成的环形橡胶结构。其中,带束胶位于胎面胶和胎体胶之间并采用Tie表面绑定约束,带束层和帘布层采用嵌入约束,带束层和帘布层参数如表 1所示。
DACS支撑体和胎面采用具有黏弹性行为的超弹性材料,主要由橡胶和聚氨酯组成。由于高分子材料的应力-应变关系通常为非线性,本文采用Neo-Hookean模型和Mooney-Rivlin模型进行描述[17]。橡胶和聚氨酯的应力-应变数据可通过单轴拉伸试验获取,并将其导入Abaqus进行本构拟合,最终获取聚氨酯和橡胶的本构参数,如表 2所示[18]。
非充气轮胎的材料还存在黏弹性行为,黏弹性主要影响轮胎的滚动阻力。对于线性黏弹性材料,剪切松弛模量可以用Prony级数表示:
式中:GR(t)为剪切松弛模量; G0为瞬时剪切模量; t0为试验时间; giP为拟合试验数据的参数; τi为松弛时间。
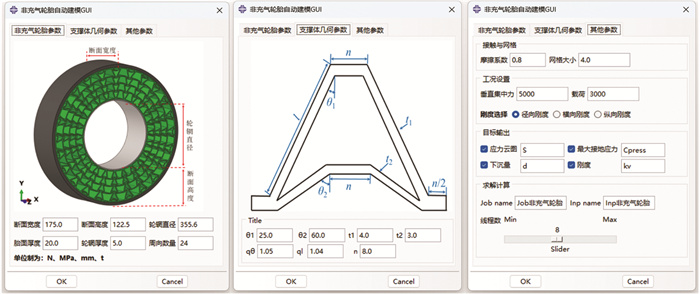
为提高DANT的建模效率,基于Abaqus软件二次开发,设计用户图形界面,搭建自动建模的参数化仿真平台。该平台包括非充气轮胎参数、支撑体几何参数和其他参数3个模块,如图 6所示。
1.1. 梯度DACS参数化设计
1.2. DANT参数化设计
1.3. DANT参数化仿真平台搭建
-
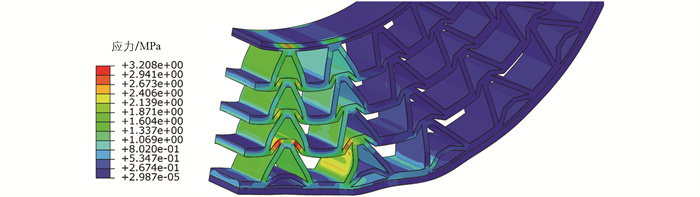
非充气轮胎的径向刚度主要取决于支撑体结构的力学特性,并直接影响非充气轮胎的承载性能。在额定径向载荷下DANT支撑体的应力分布如图 7所示,其中,支撑体的最大应力集中在短元胞壁与长元胞壁的连接处,表明该区域为应力集中区。
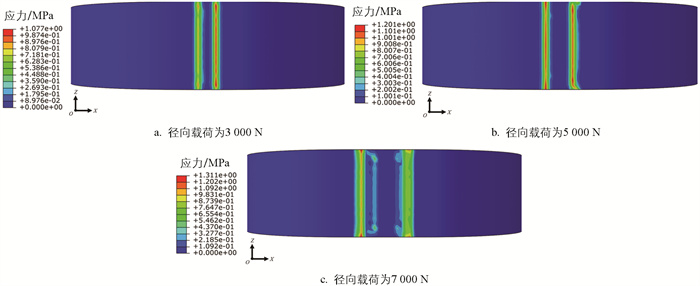
此外,对DANT施加不同的径向载荷,获取了不同径向载荷下DANT的接地印迹,如图 8所示。在不同径向载荷作用下,最大应力主要集中于滚动方向边缘,整体接地形状近似于矩形,最大接地应力和接地印迹面积都随着载荷增加而增大。
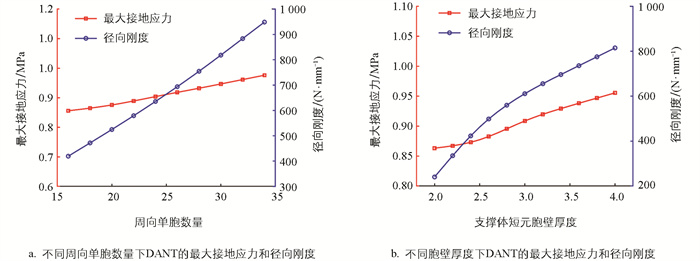
为了探究DANT的支撑体结构参数对其接地性能的影响,通过数值模拟获取了不同周向单胞数量和元胞壁厚度下DANT的径向刚度和最大接地应力。其中,径向刚度Kv可表示为:
式中:Fr为径向载荷; δr为轮辋中心的径向挠度。
如图 9a所示,DANT的径向刚度随着周向单胞数量的增加而增大,从而导致接地印迹面积的减小以及最大接地应力的增大; 同时,图 9b表明支撑体短元胞壁厚度对DANT的径向刚度、接地印迹面积与最大接地应力的影响规律与周向单胞数量相似,随着DACS胞壁厚度的增加,更多体积的材料承受径向载荷,从而导致DANT径向刚度的增加。
-
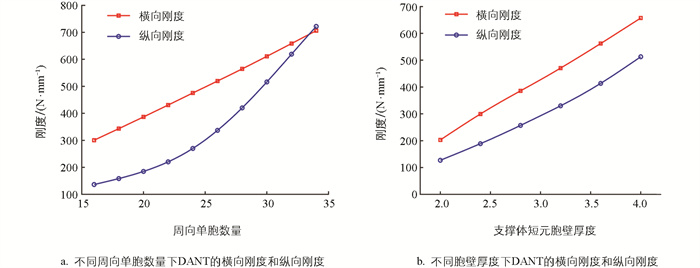
轮胎横向刚度直接影响其侧偏特性,纵向刚度则对行驶过程中的制动性能与加速牵引性能具有显著影响。为分析DANT支撑体的结构参数对其整体横向刚度和纵向刚度的影响,基于上述参数化仿真平台获取了不同周向单胞数量和胞壁厚度下DANT的横向刚度和纵向刚度,如图 10所示。
图 10a表明周向单胞数量与横向刚度近似成线性关系,随着周向单胞数量的增加,横向刚度不断增大; 而周向单胞数量与纵向刚度成非线性关系,曲线的斜率随周向单胞数量的增加不断变大,即纵向刚度增大的趋势不断加剧。图 10b表明随着支撑体胞壁厚度的增加,DANT的横向刚度和纵向刚度逐渐增大,从而增强其在横向和纵向上的抗变形能力,导致在相同横向和纵向载荷作用下支撑体结构的形变量减小。
2.1. 径向刚度与接地性能
2.2. 横向刚度与纵向刚度
-
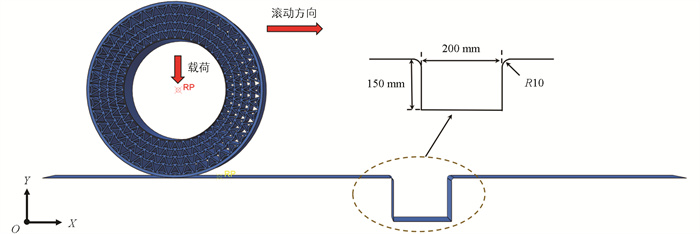
农业机械在非结构化的田间道路行驶时,不可避免地会遇到颠簸、凹坑、沟渠,并受到不同形式、不同程度的冲击。为了研究DANT在跨越沟渠工况下的动态力学性能,基于参数化仿真平台搭建了DANT跨越沟渠的有限元模型,如图 11所示。其中,沟渠宽度和深度分别为200 mm和150 mm,为避免滚动过程中轮胎与沟渠底部接触,将沟渠连接处圆角设置为10 mm,使轮辋中心处与沟渠入口保持一定的水平距离,保证DANT完成滚动加载后的位置刚好在沟渠入口处。
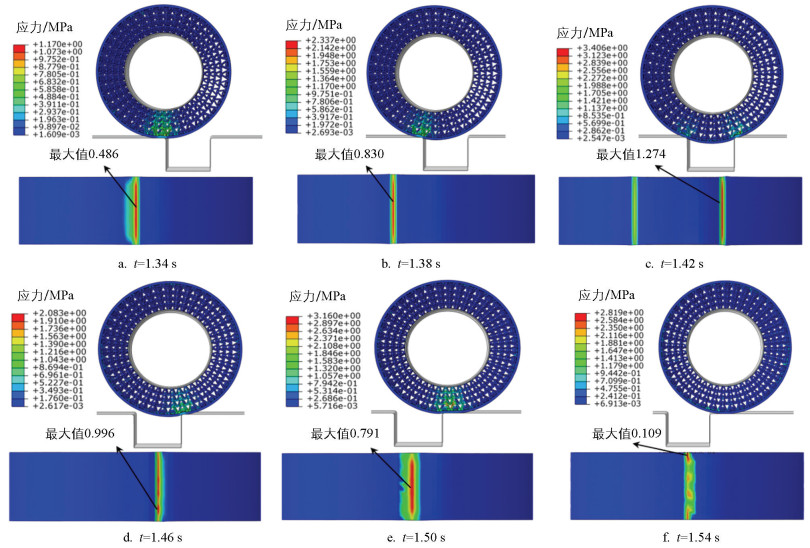
基于此,获取了DANT以滚动速度2 m/s跨越沟渠时的支撑体应力和胎面接触应力分布,如图 12所示。
在图 12中,各小图上半部分为支撑体应力分布,下半部分为胎面接触应力分布。在初始阶段(t=1.34 s),轮胎完成滚动加速并接近沟槽入口,DACS的非对称变形导致前部胎面外伸,最大接触应力上升至0.486 MPa。随后进入撞击阶段(t=1.42 s),轮胎撞击沟槽的后边缘并被瞬时压缩,最大接触应力跃升至1.274 MPa,形成动态载荷下的应力峰值。至脱离阶段(t=1.46 s),轮胎结构通过弹性回弹,最大接触应力降至0.996 MPa。最终在t=1.54 s时,轮胎完全脱离沟槽恢复稳态滚动,最大接触应力回归至0.109 MPa。综上所述,沟渠跨越过程中,最大接触应力呈现先急速上升后快速下降的趋势,其峰值(1.274 MPa)出现在撞击沟槽后缘的瞬时压缩阶段。
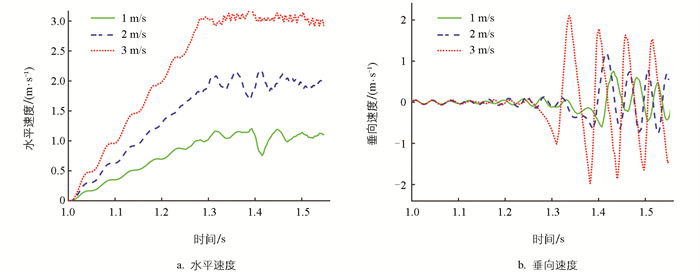
为了研究跨越沟渠工况下滚动速度对DANT瞬时动态特性的影响,将3种不同的角速度施加在轮辋参考点,使得轮胎以3种稳态滚动速度(1、2、3 m/s)越过沟渠。不同时间历程下轮辋参考点的水平速度和垂向速度如图 13所示。由图 13a可知,水平速度在加载阶段迅速上升,并在1.3 s附近达到局部峰值,表明速度目标值匹配良好。在滚动速度为1 m/s时(最低角速度加载工况下),水平速度在1.4 s降至最小值后回升,直到轮胎离开沟渠; 在滚动速度为3 m/s时,水平速度经历较短的振荡周期,并且比其他角速度的加载更早到达最小值。由图 13b可知,垂向速度在接触沟渠入口后快速下降,先达局部负峰值,再上升至正峰值,并进入振荡阶段,随后轮胎越过沟渠。综合分析可知,3种速度下垂向速度的变化趋势基本一致,但随着滚动速度的增加,垂向速度的振荡幅度逐渐加大。
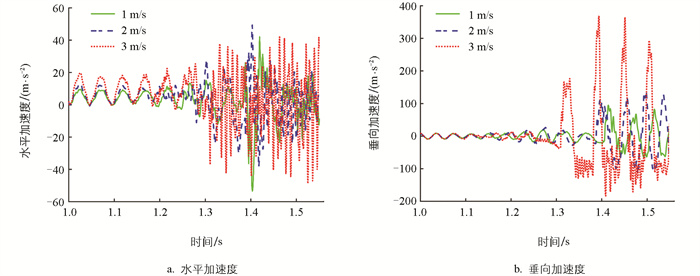
轮辋中心的水平加速度和垂向加速度如图 14所示。由图 14a可知,加载阶段水平加速度先上升至局部峰值后回落,呈周期性波动,且角速度越高,峰值越大。与沟槽碰撞后,水平加速度开始振荡,滚动速度越高,振荡幅值越大。由图 14b可知,初始加载阶段垂向加速度变化较小,接触沟渠后迅速波动,滚动速度越大,局部峰值越高。随着角速度的增加,沟槽激励效应显著增强,导致轮辋中心经历更大的冲击力和垂向加速度波动。
-
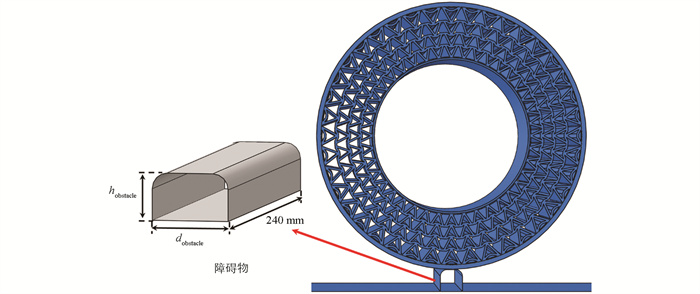
为探究DANT的越障力学特性,在刚性路面上设置不同高度和宽度的障碍物,以分析轮胎与障碍物顶部接触情况下的力学特性。如图 15所示,分别设置了在固定宽度条件下改变障碍物高度hobstacle(25、50、75、100 mm),以及在固定高度条件下改变障碍物宽度dobstacle(25、50、100、150 mm)2组数值模拟方案,其中刚性路面与障碍物均采用R4D4刚性壳单元。同时,为确保胎面与障碍物充分接触,障碍物长度设为240 mm,略大于轮胎的胎面宽度部分,并对接触区域进行圆弧过渡处理。
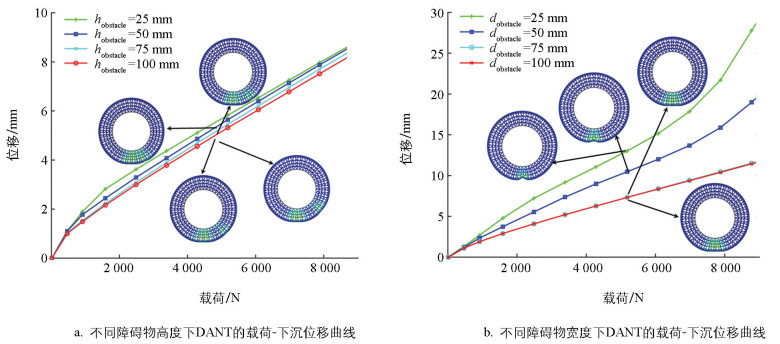
基于此,获取了不同障碍物高度和宽度下的DANT下沉位移曲线,如图 16所示。由图 16a可知,当保持dobstacle=50 mm时,障碍物高度对DANT下沉位移的影响较为有限,增高障碍物仅引起轻微的位移减小。由图 16b可知,当保持hobstacle=50 mm时,障碍物宽度对DANT的下沉位移具有显著影响。随着障碍物宽度的增加,接触面积扩大,支撑体结构的变形程度减小,导致下沉位移明显降低。当宽度超过100 mm后,进一步增加宽度对轮胎变形不再产生显著影响,下沉位移趋于稳定。
3.1. 跨越沟渠
3.2. 越障性能
-
为提升DANT承载性能,降低土壤压实影响及制造成本,本文以DANT径向刚度最大、最大接地应力最小和质量最小为优化目标,以θ1、θ2、t2、qθ和ql 5个结构参数作为优化变量,对DANT开展优化设计,建立了优化模型如式(12)所示:
式中:Cpress为最大接地应力; Mt为DANT的质量。
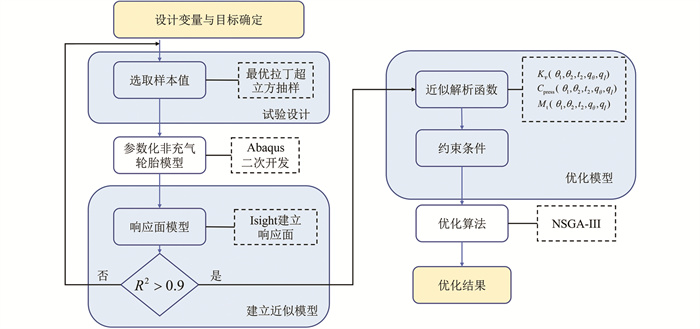
由于DANT的力学性能与支撑体的结构参数呈非线性关系,传统试错法难以找到最优结构形式。为此,首先在设计变量范围内进行试验设计,基于数据样本建立近似模型,构建设计变量与优化目标的解析关系,最终采用智能优化算法求解最优结构参数,其具体优化流程如图 17所示。
为探究设计目标与设计变量的输出响应关系,采用最优拉丁超立方抽样(Optimal Latin Hypercube Sampling,OLHS),在设计变量范围内获取30组样本值,并利用DANT参数化仿真平台计算目标输出,如表 4所示。
由于DANT设计变量与目标输出之间的映射关系为强非线性,准确的显性公式难以描述,而响应面法具有构造简单、形式灵活、收敛快和适用性强等优点,因此根据以上OLHS样本获得了不同设计变量下优化目标的响应面函数:
非支配排序遗传算法(Non-Dominated Sorting Genetic Algorithm,NSGA)是一种基于生物进化理论寻找最优解的方法[20],相较于NSGA-Ⅱ运用拥挤距离和拥挤度来对同一非支配等级的个体进行选择,NSGA-Ⅲ则运用分布参考点在高维目标中维持种群的多样性,因此具有更优秀的收敛性和多样性。本文采用NSGA-Ⅲ对DANT开展多目标优化设计,根据NSGA-Ⅲ生成的非劣解集,定义满意度函数S,以S最小化为准则选取最优结构参数,其表达式如下:
式中:ki为对应的权重系数,i=1,2,3; Kvmin和Kvmax分别为DANT径向刚度的最小值和最大值; Cpressmin和Cpressmax分别为DANT最大接触应力的最小值和最大值; Mtmin和Mtmax分别为DANT质量的最小值和最大值。
最大接地应力直接反映了轮胎与地面的接触情况,为降低非充气轮胎对土壤的压实效应,将权重k2设置为1.2,k1及k3分别设置为1,优化后支撑体的结构参数如表 5所示。优化后的结果表明,与初始值相比,DANT的径向刚度提升了7.13%,最大接地应力下降了15.63%,质量减少了5.70%。
-
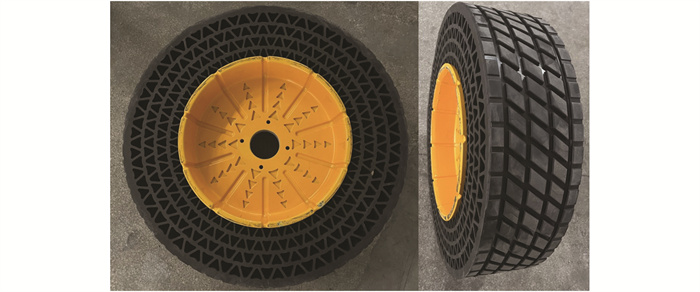
采用热压成型工艺对DANT进行加工,轮毂材料采用6061-T6铝合金。同时为了减轻轮毂的质量,使轮毂外形美观,在轮毂两侧设计了花瓣形凹坑和条形凹槽,加工后的DANT样胎如图 18所示。
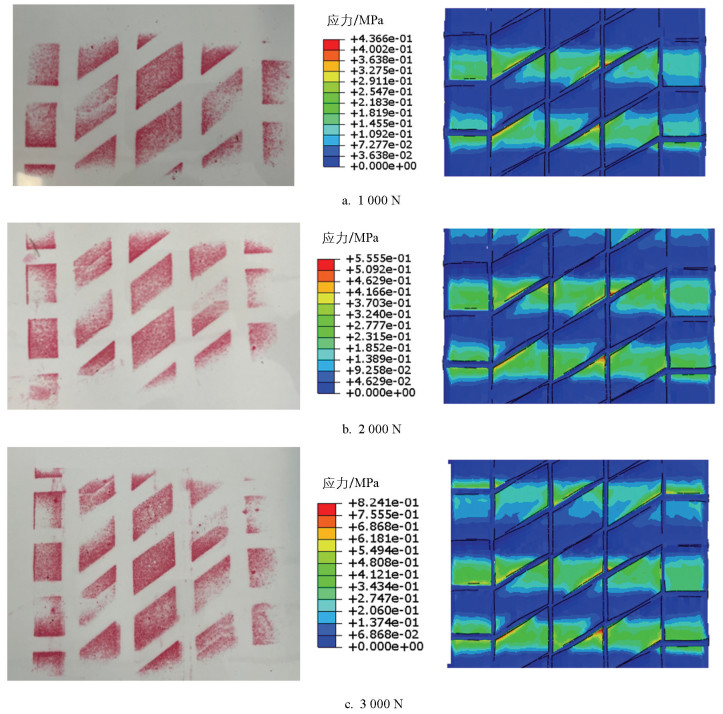
农业轮胎与土壤表面的接触情况与接地应力的大小和分布相关,为了测量DANT与路面的接触面积,将压敏胶片放置于胎面与地面接触的中间,获取了不同径向载荷下DANT接地应力的大小及分布,如图 19所示。随着径向载荷的增加,压敏胶片的显色区域越来越大,颜色也越来越深,说明接触面积和接地应力都随径向载荷的增加而变大。将压敏胶片色域与比色卡对比分析,接触应力的分布和大小与上述仿真结果一致,验证了参数化仿真平台的可靠性。
土壤容重指一定容积的土壤烘干后质量与烘干前体积的比值,侧面反映了土壤的压实情况,在相同试验条件下,土壤压实程度随着土壤容重的增大而增大[21]。为了探究DANT与不同土壤表面的接触情况,在不同的径向载荷下,对DANT和农业充气轮胎分别开展不同类型土壤的受压分析,获得了3种类型土壤被轮胎压实后的表面土壤容重,如表 6所示。试验结果表明:DANT因其梯度DACS支撑体结构实现了显著的力学分散效果,接地压强较小,从而使得受DANT作用下的土壤容重低于农业充气轮胎,验证了DANT在减少土壤压实方面的显著优势。
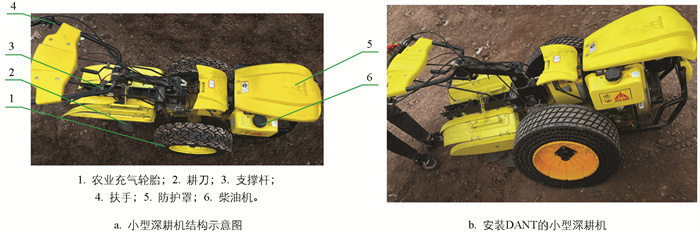
小型深耕机的结构如图 20a所示。为了验证DANT的土壤保护性能,将优化后的DANT安装在小型立轴式深耕机上,取代传统的农业充气轮胎,如图 20b所示。
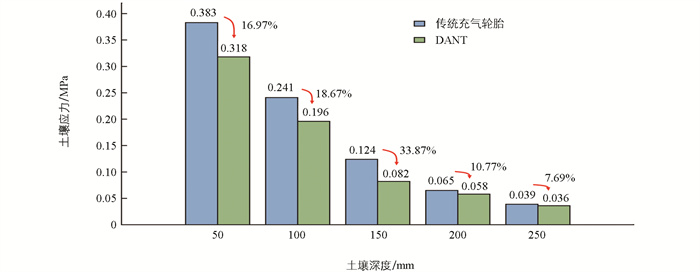
在此基础上,分别对安装DANT和农业充气轮胎的小型深耕机进行土壤压实试验,将土壤压力传感器预埋于轮胎滚动经过的土壤下层,小型深耕机作业压实土壤后记录土壤压力传感器示数变化以分析不同深度的土壤应力情况。农业充气轮胎与DANT在不同土壤深度下的土壤应力结果如图 21所示,在相同土壤深度下,装配DANT作用下的土壤应力明显低于农业充气轮胎作用下的土壤应力。同时,在5个土壤深度下装配DANT和农业充气轮胎的平均土壤应力分别为0.138 MPa及0.170 MPa,装配DANT时的土壤应力平均减少了18.82%,表明该小型深耕机配备DANT能够有效降低土壤压实程度。
-
本文基于农业环境的复杂路面情况,针对农业土壤压实问题,设计了一种新型DANT,并将设计的DANT应用于小型深耕机上,对其开展了土壤压实试验,得出以下结论:
1) 完成了针对梯度DACS的参数化设计,并依据DACS的几何关系建立了参数化DANT模型,采用Python脚本和Abaqus二次开发搭建了DANT的参数化仿真平台,实现了DANT模型构建与数值模拟自动化,显著提升了仿真效率。
2) 基于参数化仿真平台,对DANT的三向刚度、接地性能等静态力学性能开展了分析,结果表明周向单胞数量的增加以及支撑体胞壁厚度的增大可显著提升DANT的径向、横向和纵向刚度,但同时也导致最大接地应力的上升。此外,DANT在越障、跨越沟渠等复杂农业路况下仍能保持优良的动态力学性能,展现了突出的承载能力与动态稳定性。
3) 针对农业复杂工况,以DANT径向刚度最大、最大接地应力最小和质量最小为优化目标,以θ1、θ2、t2、qθ和ql作为优化变量,利用NSGA-Ⅲ算法对DANT开展多目标优化设计。优化后DANT的径向刚度提升了7.13%,最大接地应力下降了15.63%,质量减少了5.70%。
4) 试制了优化后的DANT样胎并对其开展了土壤表面接触试验,DANT因其梯度DACS支撑体结构实现了显著的力学分散效果,其作用下的土壤容重明显低于农业充气轮胎。进一步将DANT与农业充气轮胎分别安装在小型深耕机上开展田间试验,试验结果表明,装配DANT时的平均土壤应力比使用农业充气轮胎时降低了18.82%。DANT的应用显著降低了土壤压实程度,展现出良好的土壤保护性能。