




-
开放科学(资源服务)标识码(OSID):

-
国家高度重视毒品预防、管控和打击工作。随着无人机不断列装公安队伍,近年来公安禁毒部门实施以无人机为平台的“天目行动”,开展罂粟等毒品植物的非法种植巡查执法,已成为查处非法种植罂粟的有效手段。该方式利用无人机搭载的传感器,在低空对罂粟进行非接触式识别探测,大大提高了执法效果。但在执法过程中也发现,传统的大规模非法种植逐渐被更难以发现的小规模、隐蔽式种植所替代,增加了无人机智能识别的难度,迫切需要进一步提高罂粟智能识别的精度。
目前,无人机识别罂粟过程中存在以下3个问题。第一是小目标识别检测问题。小目标由于其在图像中的像素数量有限,难以携带足够多的信息,而信息的缺乏将直接导致模型难以从小目标上提取出具有区分度的特征,容易造成漏检[1]。第二是复杂背景的干扰问题。罂粟种植嫌疑人往往会利用其他植物掩饰罂粟,使罂粟难以与周围环境明确区分,导致对小目标识别不准,造成漏检。第三是获取图像中目标物体相对尺度变化问题。无人机因飞行高度不同,存在罂粟目标相对尺度变化较大的问题,会导致罂粟形态特征存在一定变化,而目标检测算法是在有限的数据集上进行训练,限制了识别目标覆盖所有潜在尺度的能力,导致罂粟识别精度下降。因此,需要选择合适的目标检测算法对罂粟进行识别。目前常用的目标检测算法主要有CenterNet[2]、RetinaNet[3]、SSD系列[4]、卷积神经网络[5]、YOLO系列[6-9]等,其中YOLO系列相比于其他系列识别速度更快、精度更高,可以满足公安实战对于罂粟识别的技术要求。本研究旨在通过改进现有的目标检测算法,增强无人机在复杂背景下对罂粟的识别能力,从而提高识别的准确度和鲁棒性。
目前,根据不同场景农作物遥感图像中小目标检测任务的实际需求,研究人员已提出多种基于YOLO系列算法的改进优化算法,且效果较好。Wu等[7]针对农作物中的小目标杂草不易被发现的问题,基于YOLO-V4建立了一个带有分层残差模式的Res2Block残差块,构建了新的骨干网络CSPDarknet53,增强了细粒度特征检测;利用残差模块IDSC-X取代了路径聚合网络PANet中的原始5次卷积块,确保了原始特征的保留,提升了识别率。Cai等[8]以YOLOv7为基础,提出了端到端特征融合和特征增强YOLO(FE-YOLO),在YOLOv7的扩展高效层聚合网络中引入信道注意力和轻量级GhostConv,从而改进了扩展高效层聚合网络(IELAN)模块,有效解决了数据集中类别不平衡的问题。Yuan等[9]研究了一种自适应多尺度YOLO(AM YOLO)算法,提高了多尺度实例分割目标的能力,实现了精度与速度之间的最佳平衡。Sugashini等[10]提出一种基于视频的智能物体检测模型,捕获的视频被转换为关键帧并使用基于相关融合的视差方法进行预处理,实现识别精确率的提升。Xia等[11]利用特征重用技术重建Neck,以尽量减少特征中信道信息在传输过程中的丢失,保持了模型强大的特征融合能力。李文峰等[12]提出一种基于改进YOLOv4的成熟番茄果实识别方法,以解决采摘智能机器人识别中广泛存在的因枝叶遮挡而导致识别不准确的问题。李慧琴等[13]在YOLOv8n模型的特征提取过程中,加入了CBAM注意力机制,并以提高模型泛化能力为目标,采用BiFPN模块替代了原本的PANet结构,从而实现了更有效的多尺度特征融合。这些研究成果说明了YOLO系列算法在植物或小目标识别中被广泛应用,但是目前的研究成果难以解决小目标识别、背景复杂、目标物体相对尺度变化等问题。
基于此,本研究基于YOLOv8n基本网络框架,通过引入iRMB注意力机制,增强模型对关键特征的捕捉能力,提高小目标检测精度;通过引入CARAFE上采样算子网络,使模型具备更大感知区域内聚合上下文信息的能力,以应对复杂背景问题;通过引入MPDIoU损失函数,提高模型对目标识别的精确性,以适应目标相对尺度变化较大的挑战。
HTML
-
当前,农作物识别算法存在以下3个问题。第一是某些识别算法对农作物本体的关注度不够。大部分算法主要关注于识别农作物的形状、大小等外部边界特征,忽视了对农作物内部特性的深入分析。第二是算法在利用上下文信息方面还存在不足。农作物生长环境等上下文信息对于准确识别农作物种类至关重要,然而目前的算法并未充分利用这些信息,导致了识别准确度有限。第三是算法存在训练过拟合问题。由于训练数据的限制和模型复杂度的增加,识别算法易出现过拟合现象,所以算法在实际应用中的泛化能力不足,影响了其在真实场景中的使用效果。
基于YOLOv8n基本网络框架进行识别算法的改进研究,采用的改进策略有提升农作物本体关注度、充分利用上下文信息、避免出现过拟合现象等优势;同时解决了罂粟识别一直存在的小目标检测问题、复杂背景问题、目标物体尺度变化问题。通过引入iRMB注意力机制、采用CARAFE上采样算子、使用MPDIoU损失函数进行优化,使得模型能够更好地应对图像中小目标、复杂背景以及目标尺度变化较大等挑战,从而实现基于无人机平台的罂粟快速准确识别。
-
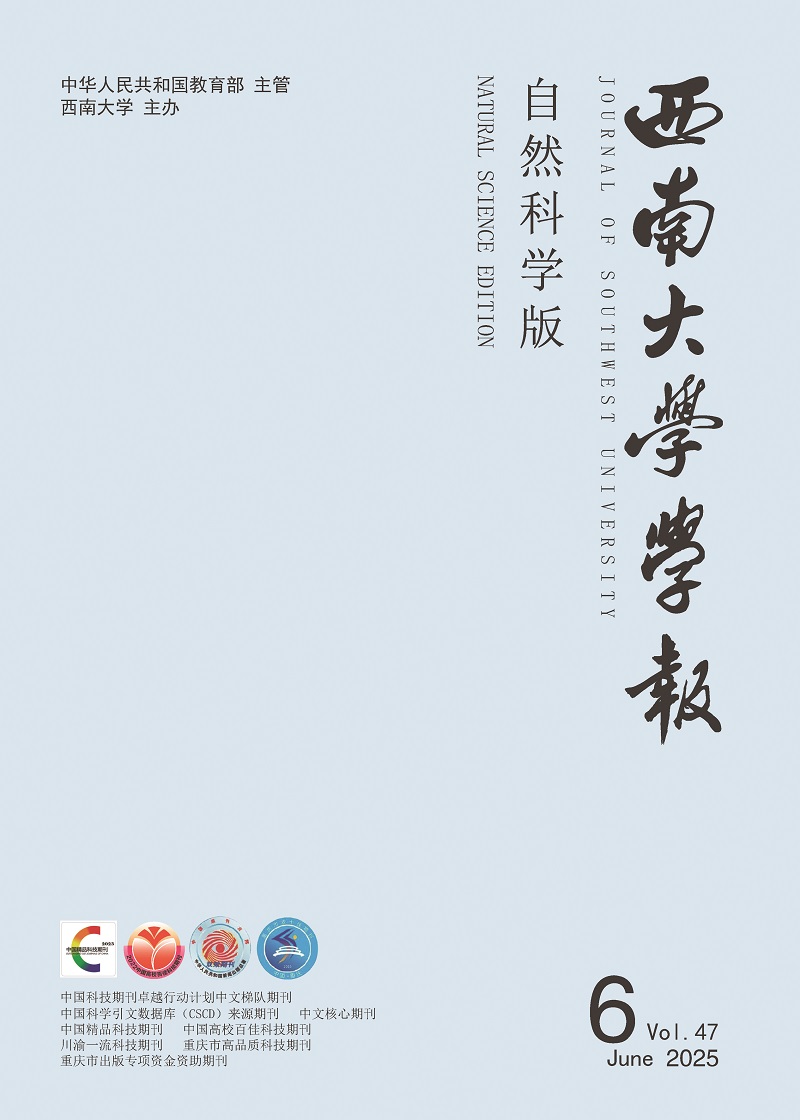
YOLOv8n的网络结构由4部分构成,分别为输入端的Input层、负责特征提取的网络主干Backbone层、用于特征增强的Neck层以及负责输出的Head层。如图 1所示,Input层的主要职责是接收待分析的图像并将其输入网络;随后,Backbone层对图像执行特征提取操作,为后续的处理步骤提供基础;而Neck层对Backbone层输出的特征层进行池化(Pooling)和特征融合(Feature Fusion),以增强图像的特征表达;最后,Head层负责将加工后的特征转化为网络的输出[14]。
对比图 1展示的YOLOv8n网络结构,改进后的识别算法网络结构如图 2所示。

首先,在YOLOv8n网络模型Head层的C2f模块和Detect头之间引入iRMB注意力机制。该机制优化后的多个注意力模块能够并行关注多种不同的特征组合,加强对罂粟花蕊和罂粟果实的关注度,捕捉到更多的罂粟细节和局部特征,使得算法在处理罂粟小目标时,能够更加精确地识别和区分这些目标,从而提高检测精度。
其次,在YOLOv8n网络模型的Neck层中,采用CARAFE上采样算子来替代传统的upsample模块。CARAFE上采样算子以各位置为中心的预定义区域内的加权组合方式重构特征信息,其权重生成过程遵循内容感知机制。每个位置配备多种不同的上采样权重组合,生成特征重新排列后,以空间块的形式完成特征上采样。这种结构设计拓展了模型的感知区域范围,能够更充分地利用采样点罂粟的局部上下文信息;同时,CARAFE上采样算子实现了基于内容感知机制的采样策略,使上采样核能够与特征图的语义信息相结合,从而提高了复杂背景下算法对罂粟的识别能力。
最后,在YOLOv8n网络模型的Head层中将损失函数由CIoU替换为MPDIoU。MPDIoU损失函数通过最小化预测2个角点之间的距离来降低损失,这种基于点距离的度量方法解决了现有损失函数无法有效优化预测边界框与真实边界框具有相同长宽比但长宽值完全不同的问题,使得模型能够更好地适应罂粟遥感图像中的多尺度目标,提高了不同观测高度下尺度变化不同的罂粟识别率。
-
归纳一个通用的元移动模块(Meta Mobile Block,MMB)[15],当MMB中的有效算子满足特定条件时,可以推导出iRMB注意力机制[16]。现分2步详细介绍iRMB注意力机制的设计与计算流程。
-
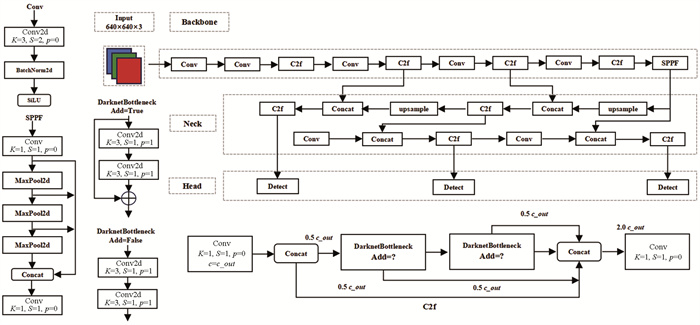
通过重新思考MobileNetV2神经网络架构中的倒置残差块(IRB)以及Transformer模块中的多头自注意力模块(MHSA)和前馈神经网络(FFN),提出了一种通用的MMB。此模块采用参数化的扩展比例λ和高效操作符F来实例化IRB、MHSA和FFN。MMB实现了这3种模块的共性,可以视为Transformer模块的改进型轻量级集成体。MMB结构如图 3所示。
以图像输入X ∈ RC×H×W为例,输出/输入等于λ,MMB首先使用一个扩展MLPe来扩展通道维度,可以表示为:
然后通过高效操作符F强化图像特征,可以表示为:
接着通过一个具有收缩功能的MLPs,以上文等于输出/输入的λ来降低通道维度,可以表示为:
最后采用残差连接得到最终输出,可以表示为:
-
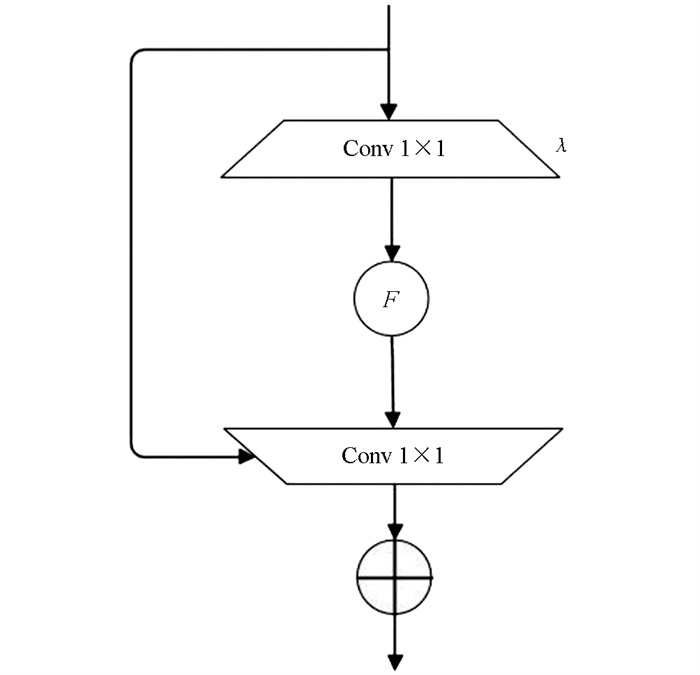
在MMB的基础上,构建了一种高质高效的iRMB注意力机制,iRMB结构如图 4所示。
注意力机制中的F为MHSA和卷积操作的级联,形式化表示为F(*)=Conv(MHSA(*))。此设计融合了类似CNN的机制来模拟局部特征,以及类似Transformer模块的动态建模能力以学习长距离交互。随后,采用高效的窗口式多头自注意力机制(W-MHSA)和带有跳跃连接的深度卷积(DW-Conv),以实现注意力机制成本和准确性之间的平衡。
使用未扩展的X从而更高效地计算注意力矩阵,即Q = K = X (X ∈ R C×H×W),将扩展后的Xe标识为V(V ∈ RλC×H×W)。这种改进被称为扩展窗口式多头自注意力机制(EW-MHSA),即iRMB注意力机制,其应用性更强,形式化表示为:
这种级联方式可以加速感受野的扩展并减少模型的最大路径长度L,其公式如下:
式中:W为输入宽度;k为卷积核大小;w为注意力窗口大小。
-
图 5展示了CARAFE算法结构,该算法由上采样卷积核预测结构与特征重组结构2部分组成[17],旨在通过上下文信息的传递生成最终的上采样特征图。
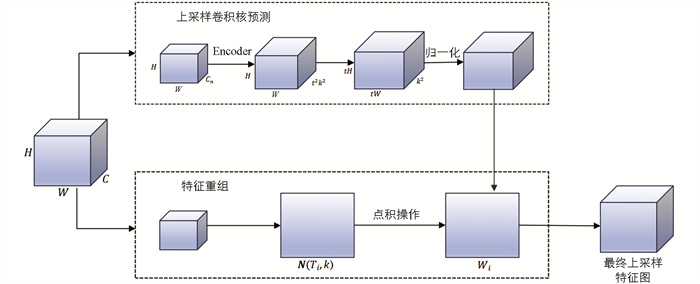
该算法先输入宽、长、通道数为H×W×C的特征图T,设定上采样倍率为t,然后采用1×1卷积将通道数降至Cn以降低计算量,再用k×k卷积核编码位置特征信息并展开通道的位置信息来预测上采样核,经Softmax正则化使核权重总量为1。特征重组模块以预测的上采样核与输入特征图像素点中心k×k区域进行点积操作,使相同的上采样核参与相同位置不同通道的计算,得最终上采样结果[18]。
-
在YOLOv8n网络中,计算预测框坐标损失采用CIoU损失函数,它在DIoU损失函数的基础上引入了长宽比,具体形式如下:
其中:w、h和wgt、hgt分别为预测框的长、宽与真实框的长、宽;v为预测框与真实框在长宽比上的差异量化值;α为根据IoU动态调整长宽比差异的损失权重。v和α的协同实现了对长宽比的间接优化,比直接使用单一比例值更稳定,更符合优化目标。
然而CIoU损失函数采用的长宽比是相对值,并非绝对值。罂粟遥感影像中,远景和近景的不同拍摄角度可能导致2种照片中罂粟具有相同长宽比但长宽值完全不同的情况,此时CIoU损失函数无法有效应对。
为更好地满足遥感图像中不同尺度目标的检测需求,引入了MPDIoU损失函数[19-20],计算公式如下:
式中:d1与d2分别为预测框与真实框左上角点与右下角点的距离。d1与d2的计算公式如下:
其中:(x1gt,y1gt)为真实框的左上角点坐标;(x2gt,y2gt)为真实框的右下角点坐标;(x1prd,y1prd)为预测框的左上角点坐标;(x2prd,y2prd)为预测框的右下角点坐标。
MPDIoU损失函数综合考虑了边界框之间位置和大小的偏移,在预测框与标注框重叠或不重叠的情况下都能有效收敛[21],并且通过最小化预测2个角点之间的距离来降低损失,这种基于点距离的度量方法解决了现有损失函数无法有效优化预测边界框与真实边界框具有相同长宽比但长宽值完全不同的问题,从而更加精确地度量了罂粟预测框与罂粟真实框之间的差异,使得模型能够更好地适应遥感图像中的多尺度罂粟目标,提高不同观测高度下相对尺度变化的罂粟识别率。
1.1. 结构改进位置详解
1.2. iRMB注意力机制
1.2.1. 归纳通用的元移动模块
1.2.2. 基于元移动模块构建iRMB注意力机制
1.3. CARAFE上采样算子
1.4. MPDIoU损失函数
-
为了验证改进模型的优化性能,将改进后的算法模型从损失函数曲线、mAP衡量指标曲线、精确率和召回率指标曲线3个方面进行验证分析。训练过程中,设置初始学习率为0.01,动量为0.937,权重衰减系数为0.000 5,每批次的图像数量为32张,训练轮数为300,输入图像尺寸为640×640。
-
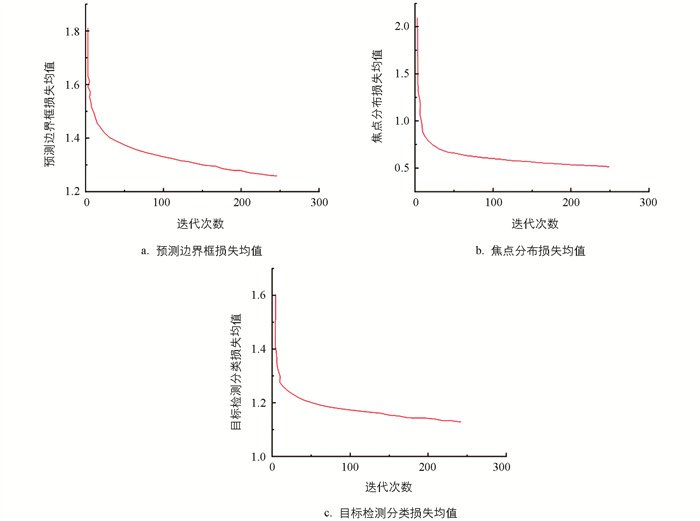
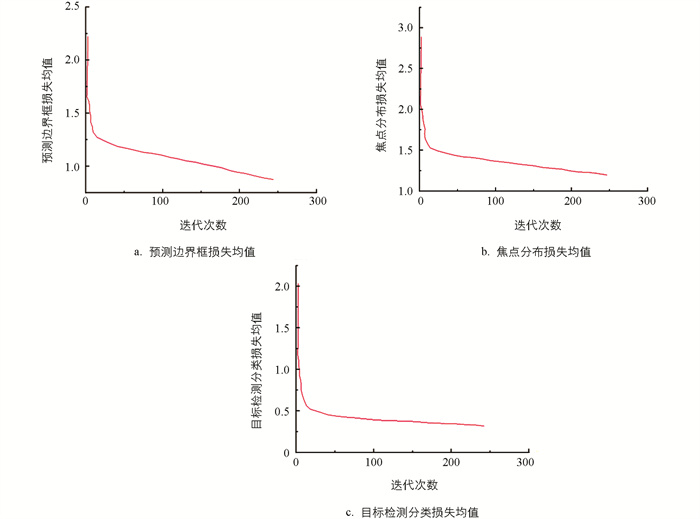
YOLOv8n的损失函数曲线如图 6所示,改进后的YOLOv8n的损失函数曲线如图 7所示,分别包括预测边界框损失均值、焦点分布损失均值、目标检测分类损失均值3类损失函数曲线。损失函数量化了模型预测与实际观测值之间的偏差。较低的损失值反映了模型具有较高的鲁棒性,表明其能有效应对数据的变化。对比图 6、图 7可以发现,训练过程中随着迭代次数的增加,改进后的YOLOv8n较YOLOv8n在3种损失函数中展现出的持续下降趋势更加显著,充分显示了改进算法模型在学习过程中逐渐减小训练误差的特性,其拟合能力得到了增强,最后达到稳定并处于收敛状态。
-
YOLOv8n的mAP衡量指标曲线如图 8所示,改进后的YOLOv8n的mAP衡量指标曲线如图 9所示。其中,mAP0.5是指当IoU为0.5时的mAP;mAP0.5∶0.95是指当IoU阈值从0.5增加到0.95时,以0.05为步长上的mAP。
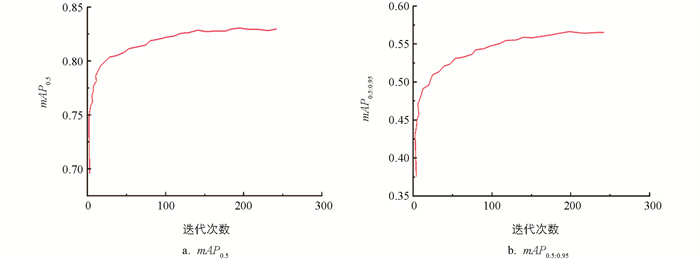
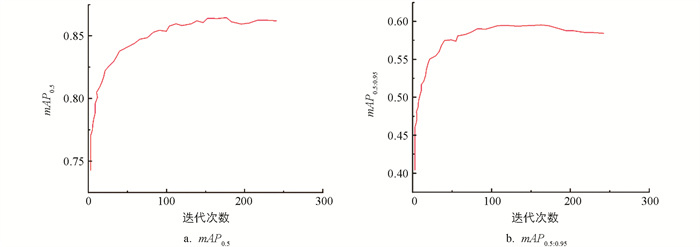
从图 8、图 9中可以看出,mAP曲线展现了一种较为平稳的增长态势,在达到收敛点后保持相对稳定,证明了在训练过程中mAP持续稳定地提升,并且没有出现明显下降,2种算法均未出现过拟合的问题。进一步对比图 8、图 9发现,改进后的图形中mAP衡量指标曲线更快地到达平衡稳定状态,具有更好的收敛特性。
-
YOLOv8n的精确率和召回率指标曲线如图 10所示,改进后的YOLOv8n的精确率和召回率指标曲线如图 11所示。
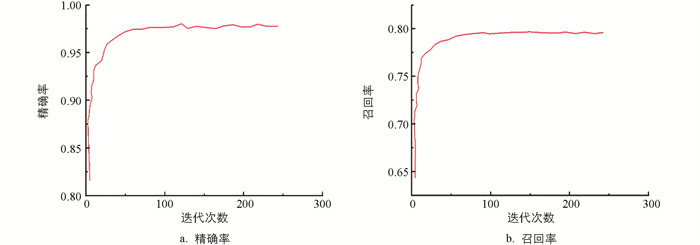
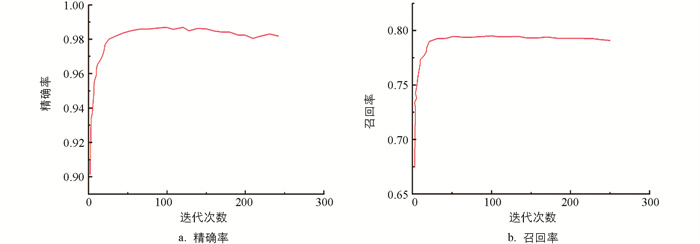
从图 10、图 11中可以看出,精确率和召回率指标曲线在训练过程中存在一定程度的微小波动,但总体来说,2种算法的数值都在不断上升,说明随着训练的进行,模型的性能在逐步提升,并且最终在训练轮次的末尾达到了收敛状态。这一过程也充分验证了本研究罂粟数据集训练结果的有效性。进一步对比图 10、图 11发现,改进后的算法模型收敛性能更快,效果更好。
2.1. 损失函数曲线分析
2.2. mAP衡量指标曲线分析
2.3. 精确率和召回率指标曲线分析
-
PR曲线(Precision-Recall Curve)是一种用于评估分类模型性能的工具,尤其在数据分布不均衡(例如正负样本数量差异大)时更为有效。它通过展示不同分类阈值下精确率和召回率的权衡关系,帮助理解模型的预测质量。YOLOv8n的PR曲线如图 12所示,改进后的YOLOv8n的PR曲线如图 13所示。
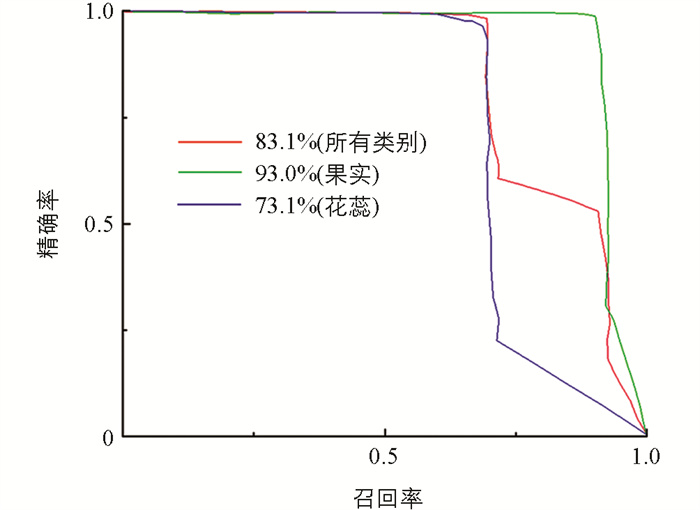
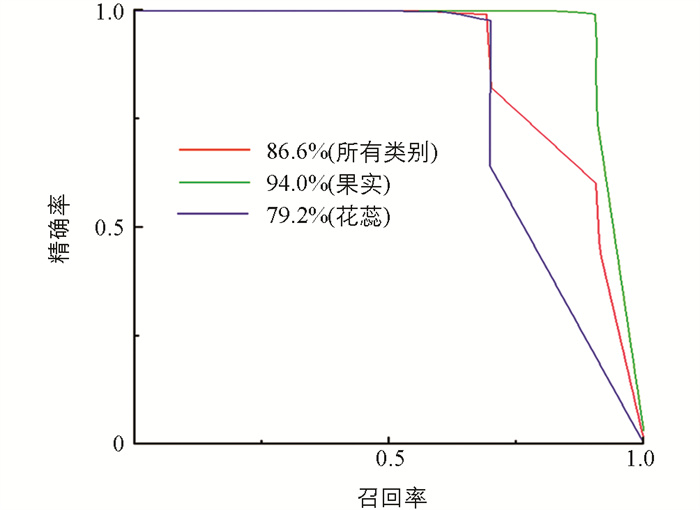
通过PR曲线图可以直接获得各目标类别对应的AP(Average Precision),即平均精确率。AP用于衡量模型对某一特定目标类别的检测性能,它通过包含M张图像的验证集计算得出,具体代表该目标类别在所有图像中的精确率平均值。AP结合了所有置信度的情况,是精确率和召回率关系的综合衡量指标。实质上,AP等于PR曲线下与坐标轴围成的面积,较大的AP表明模型在检测特定类别物体上的精度更高。由图 12、图 13整理得表 1。由表 1可知,改进后的YOLOv8n对果实的AP为94.0%,相比YOLOv8n的93.0%提升了1.0个百分点;改进后的YOLOv8n对花蕊的AP为79.2%,相比YOLOv8n的73.1%提升了6.1个百分点。因此改进后的YOLOv8n识别算法相比YOLOv8n识别算法,对果实和花蕊的AP都有一定提升。
mAP反映了由M张图像构成的验证集中各目标类别精确率的总体平均值。它综合考虑了不同类别、不同召回率水平下的模型准确率,为模型的整体性能提供了一个全面的评估。mAP特别适合于评估需要同时识别多种对象的复杂任务,比如罂粟果实和罂粟花蕊。由表 1可知,改进后的YOLOv8n的mAP为86.6%,相比YOLOv8n的83.1%提升了3.5个百分点,因此该模型相比其他模型有更高的识别效果。
-
通过分析AP与mAP发现,iRMB注意力机制帮助模型在特征提取时更好地聚焦于重要特征,减少了冗余信息的干扰;CARAFE上采样算子的引入改善了特征图的重建质量,使得上采样过程更加精细,尤其对于细小目标(如花蕊)的检测有更大帮助;MPDIoU损失函数的引入优化了目标框的回归过程,在处理具有不同形状、尺度的目标时,改进后的损失函数能更好地对齐预测框和真实框,提高了定位精度。这些改进策略的共同作用使AP和mAP得到提升,说明改进后的算法可更好地对罂粟进行识别。
总结来看,罂粟果的形状、大小和颜色等外观特征相对更加固定和明显,通常呈球形或椭圆形,有比较规则的轮廓,在不同生长阶段变化程度较小。而罂粟花的形态比较复杂多变,其花瓣数量可能会因为品种、生长环境等因素而不同,花瓣形状也较为多样,花瓣颜色也可能有多种变化,包括白色、粉色、红色等。此外,罂粟花容易受风、雨等自然因素的影响而变形,以至于本模型识别罂粟果的成功率相较于罂粟花更高。
但由于罂粟花数据集采集较为困难,本模型未建立幼苗期和生长后期图库,仅选择罂粟的开花期和结果期图片作为对象进行训练,验证实验不能实现生长全周期检测。下一步,将针对此种情况采集不同生长时期的罂粟图片,不断扩充训练图库集,为罂粟全周期识别提供技术保证。
3.1. 改进效果验证
3.2. 验证结果分析
-
研究了基于YOLOv8n基本网络框架的罂粟识别检测算法,在现有研究成果的基础上,引入了iRMB注意力机制、CARAFE上采样算子、MPDIoU损失函数,使算法模型具备更好应对图像中罂粟目标小、背景复杂以及目标尺度变化较大等问题的能力,并采用损失函数曲线、mAP衡量指标曲线、精确率和召回率指标曲线验证了改进算法,结果发现改进后的算法平衡性、收敛性更佳,体现了更优的性能。通过图库验证集测试发现,改进后的mAP从83.1%提高到86.6%,增长了3.5个百分点,花蕊和果实的AP均有一定的提升,充分证明了改进后识别算法的实用性和有效性。
 DownLoad:
DownLoad: