




-
开放科学(资源服务)标识码(OSID):

-
花椒(Zanthoxylum bungeanum Maxim.)作为药食同源作物,是我国调味农作物和经济林产业中重要的经济作物,如竹叶花椒、青花椒、日本山椒等同时可作为药材和调味品使用。我国青花椒种植面积和产量均居世界首位,2023年主产区产量突破65万t[1-3]。花椒作为多年生植物,多种植在山坡和丘陵地带,因其树干、树枝以及叶柄均长有刺,果柄较短,果实小且成熟后易干裂脱仁等原因,花椒采摘难度较大[4]。在花椒种植规模不断扩大的同时,花椒采收仍然以传统手工作业为主,存在人工采摘劳动强度大、生产效率低、投入成本高等问题。
目前,研究者针对花椒采摘机的设计及其工作性能开展了大量研究工作。花椒采摘机主要有3类,分别为:基于“下桩”采摘技术的采摘机、半自动手持式采摘机和基于图像识别的机器人采摘机。相关研究表明,不直接树上采摘,而是改为剪下枝条(“下桩”)再摘选花椒果的采摘技术,改善了采用传统人工树上直采技术的花椒生长与管理模式,使花椒产量显著提高[1]。杨玲等[5]研制的旋转剪切式青花椒采摘装置,通过旋转花椒枝导向喂入往复式切割器,初步解决了花椒枝难以喂入、刀口堵塞的问题,但该装置在枝条夹持时需要停机喂入花椒枝; 方雪峰等[6]研制的鲜花椒枝果分离机,通过有齿环刀旋转切割使花椒枝果分离,同时浮动夹持输运部件拖曳花椒枝; 李瑞[7]结合“下桩”采摘技术设计的青花椒采摘机,通过试验验证了花椒机械化采摘的可行性,但该机存在花椒枝难以喂入、刀口堵塞等问题; 李秋生等[8]研制的干后青花椒脱粒装置,通过对“下桩”后烘干的带果花椒枝高速冲击,同时齿杆翻搅花椒枝,使花椒果从花椒枝上脱落,该装置结构简单、紧凑,且喂料、脱粒、收集一体化作业,但该装置仅适用于烘干后的花椒枝; 宋树民等[9]研制的花椒采收碎枝一体机,通过对关键部件设计并进行试验,验证了花椒采收、碎枝一体化作业的可行性。上述机型均采用“下桩”采摘技术实现花椒枝果分离,但存在花椒枝喂入困难、易堵塞的问题,停机人工喂入花椒枝的设计也使采摘效率降低。随着乡村振兴战略的实施,全国各地花椒种植面积和产量逐年上升[3],如何实现高效低损采摘成为当前研究重点。万芳新等[10]研制的梳齿-气吸式花椒采摘机,通过对采摘流场分析及气吸式采摘装置的设计,实现了花椒低损采摘; 黄华等[11]设计了一种基于改进YOLOv5的花椒簇识别系统,实现了在复杂环境下对连株花椒的分离识别; He等[12]设计了一种用于自动采摘的HSV(Hue,Saturation,Value)颜色空间自适应阈值花椒果检测系统,在召回率、准确率和误报率方面均有较大提升; Guo等[13]提出了一种基于YOLOv5的花椒检测网络,解决因形状不规则和遮挡导致花椒检测准确性低的问题; Lu等[14]通过对比传统分割与深度学习方法,提出了适用于青花椒采摘的图像分割方法。然而,现有花椒采摘机在整机尺寸、制造成本、采摘效率和应用成熟度等方面均有较大改进空间。
为解决上述问题,本文结合“下桩”采摘技术,基于往复式切割原理,研制一种分层剪切式青花椒采摘装置,为花椒采收及机械化喂入提供新的方案。通过对分层剪切脱果、带齿联合输运、双齿啮合拉拽等关键部件进行参数设计、运动学和动力学分析,确定影响青花椒采摘的工作参数; 通过单因素试验确定工作参数范围,结合正交试验,探究工作参数与评价指标的互作关系,得到最优工作参数,可为青花椒高效低损采摘设备的研发提供参考。
HTML
-
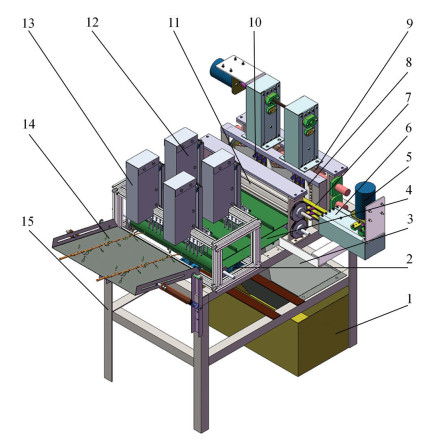
根据青花椒采收的作业要求和花椒枝形态特征,设计分层剪切式青花椒采摘装置。该装置由机架、放料装置、分层剪切脱果装置、带齿联合输运装置、双齿啮合拉拽装置等组成,整机结构如图 1所示。分层剪切脱果装置由往复式切割器驱动电机,往复式切割器传动箱以及往复式切割器Ⅰ、Ⅱ组成。其中往复式切割器Ⅰ两侧设有导向板,避免弯曲度过大的花椒枝漏切。分层剪切式青花椒采摘装置的主要技术参数如表 1所示。
-
分层剪切式青花椒采摘装置的工作流程包括人工上料、枝条输运、枝条脱果和枝条拉拽4个工序。将“下桩”后的花椒枝通过人工上料放至放料装置; 均布在传送带上的柔性拨板将花椒枝由放料装置拨至传送带进行输运,在带齿联合输运装置的夹持作用下输运至分层剪切脱果装置,实现花椒枝的喂入; 分层剪切脱果装置切断花椒枝上的果柄及侧枝,实现花椒枝脱果; 切下来的物料(即花椒果、侧枝等)掉入落料口,脱果后的花椒枝通过双齿啮合拉拽装置拉拽至分层剪切式青花椒采摘装置的后方。
1.1. 分层剪切式青花椒采摘装置整机结构
1.2. 工作原理
-
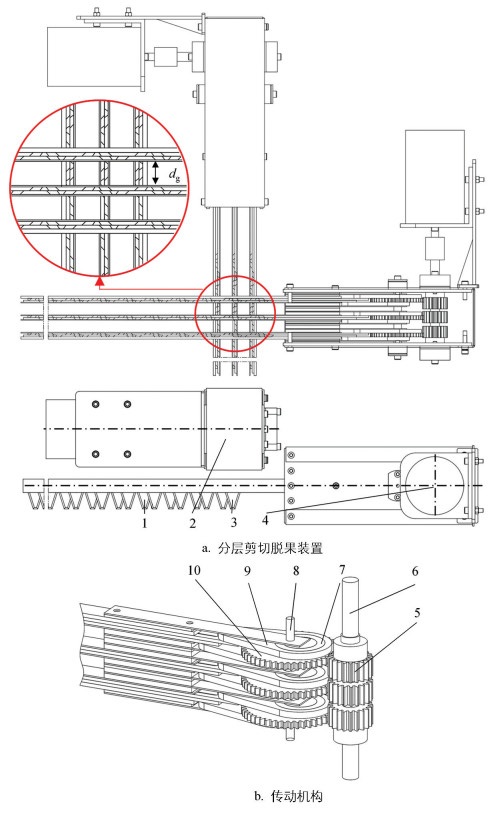
采用分层剪切的方式实现青花椒脱果,以往复式切割器为切割部件设计分层剪切脱果装置。往复式切割器是大宗作物机械化采摘应用最广泛的部件,在沙棘、茶叶采摘中应用较广。往复式切割器按动刀类型分为单动刀和双动刀2种,双动刀切割器比单动刀切割器振动低[15-19]。为实现全方位脱果,提高花椒枝的采净率,分层剪切脱果装置选择横、竖往复式切割器相结合的方式。该装置由3组往复式切割器并排组成,相邻2组往复式切割器之间的间隙为脱果间隙dg,根据花椒枝头部端直径范围确定脱果间隙dg为16 mm。分层剪切脱果装置结构如图 2a所示,由于在输运作业中花椒枝平放在传送带上,花椒枝先进行横向脱果。本装置需保证花椒枝通过脱果间隙,同时满足驱动3组往复式切割器的要求,为保障装置长时间作业的可靠性以及紧凑性,选择曲柄滑块机构传递力矩[20-21]。往复式切割器传动机构由输入齿轮、输入轴、输出齿轮、输出轴、连杆轴承、连杆等组成,如图 2b所示。
-
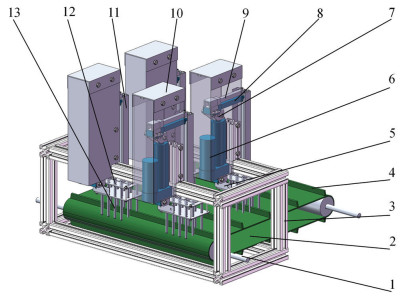
带齿联合输运装置由传送带、前拨齿机构(2组)和后拨齿机构(2组)等组成,前、后拨齿机构均由推杆电机(Ⅰ、Ⅱ)、电机支撑件、弹簧及拨齿等组成,如图 3所示。拨齿是拨齿机构的主要工作部件,其作用是将传送带上无序的花椒枝高效稳定地输运至分层剪切脱果装置,在带齿联合输运装置的夹持及分层剪切脱果装置的剪切作用下实现花椒枝脱果。通过在拨齿外层添加柔性保护材料,减少花椒果与拨齿刚性碰撞造成的油胞破裂。
花椒枝稳定输运至切割区是后续高效脱果的核心工序和难点。本文中带齿联合输运装置的工作流程如图 4所示,具体流程为:①人工将花椒枝放至放料装置,花椒枝被传送带输运向拨齿区,如图 4a所示。②花椒枝输运至拨齿区,前拨齿机构中的推杆电机Ⅰ下降,拨齿由花椒枝的上侧约束其可能存在的移动,推杆电机Ⅱ伸出实现花椒枝同向输运; 同时后拨齿机构中的推杆电机Ⅰ上升,推杆电机Ⅱ收回,为下一次输运作业做准备,如图 4b所示。③前拨齿机构将花椒枝完全输运至传送带上,单次输运作业完成,同时推杆电机Ⅰ上升,后拨齿机构开始下一次输运作业,如图 4c所示。④花椒枝前段进入切割区进行脱果,后拨齿机构持续输运作业,直至花椒枝尾部端脱离拨齿区,如图 4d所示。

2.1. 分层剪切脱果装置及传动机构
2.2. 带齿联合输运装置
-
拨齿的运动通过2组推杆电机相互协同的伸缩运动来实现。为分析拨齿机构输运作业的条件及确定拨齿机构的参数,将拨齿的运动过程分解并建立坐标系。坐标系原点为前拨齿机构(以其中1组为例)的拨齿最下端上任一点(运动起始位置点O)在机架上的投影点O1,花椒枝的输运方向为x轴,竖直方向为z轴,如图 5所示。
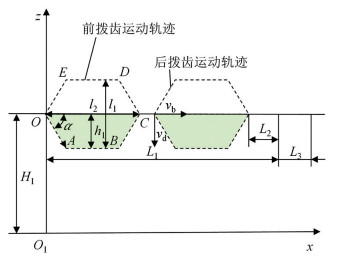
拨齿机构的拨齿(末端)运动轨迹方程为:
OA段:
AB段:
BC段:
CD段:
DE段:
EO段:
-
拨齿机构要完成对花椒枝的输运作业,需满足拨齿机构在输运作业中拨齿的齿尖与传送带接触,且拨齿在上升过程中不会将已喂入往复式切割器Ⅰ的花椒枝反向拖出,以避免往复式切割器对花椒果的二次损伤。拨齿机构的运动轨迹对花椒枝的输运效果有重要影响。用拨齿机构中推杆电机Ⅱ的下降速度vd与推杆电机Ⅰ的前进速度vb的比值λ表示压送比,即λ=vd/vb,如图 6所示。
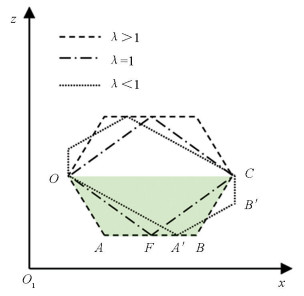
拨齿机构能够输运作业的条件是λ≥1,即推杆电机Ⅱ的下降速度不低于推杆电机Ⅰ的前进速度。当运动点位于点A时,拨齿的齿尖与传送带相接触并开始输运花椒枝,λ在一定程度上决定了拨齿机构的运动轨迹。当λ>1时,拨齿区为等腰梯形,拨齿对花椒枝作用距离最长,拨齿下降距离和上升距离都较短; 当λ=1时,点A、B重合于点F,拨齿区范围由四边形变为等腰三角形,拨齿下降距离和上升距离都延长,此时拨齿在收齿时完全脱离花椒枝; 当λ<1时,拨齿区范围为不规则四边形,拨齿下降距离延长,上升距离缩短,当拨齿上升至点B′时,拨齿无法脱离花椒枝。
当λ>1时,拨齿区保持为等腰梯形,但水平方向上点A到点B的长度随λ的变化而变化。水平长度影响拨齿的运动轨迹,并进一步影响输运效果和拨齿区的面积。根据花椒枝形态特征,其侧枝多且围绕主枝生长发散[22],在拨齿上升过程中被压平的侧枝逐渐恢复,直到拨齿运动至点C才收齿。此时,拨齿不易将已喂入往复式切割器的花椒枝拖出。
-
实际取样测量的花椒枝头部端直径为6.71~13.23 mm,尖刺高度为7.78~16.89 mm,拨齿对花椒枝进行作业时,同时将花椒枝的侧枝压平,拨齿距离传送带的高度h1大于花椒枝最大直径和尖刺最大高度之和(即h1>30.12 mm)。在实际输运作业中,根据现场“下桩”的花椒枝来确定h1,设计时h1=40 mm,且可以上下调节10 mm。
实际取样测量的花椒枝长度为237~682 mm。如图 6所示,花椒枝尾部端从后拨齿机构的点A开始输运至点B,若花椒枝头部端未到达双齿啮合拉拽装置,导致花椒枝卡在机器中间而被重复剪切,则会影响采摘流程,造成花椒果二次损伤。在图 6中,拨齿相对于双齿啮合拉拽装置正常装配条件下,当花椒枝尾部端输运到点B时,双齿啮合拉拽装置夹持到花椒枝头部端进行拉拽,需满足条件:
式中:Lmin为花椒枝最短长度(mm)。
在后拨齿机构和双齿啮合拉拽装置之间还有拨禾辊筒、分层剪切脱果装置等,各装置之间的距离取不干涉各自运动的最小值。
-
拨齿机构输运作业中,在一组拨齿机构输运完成并开始回齿时,另一组拨齿机构需继续对花椒枝起输运作用,使花椒枝稳定输运至分层剪切脱果装置。拨齿机构实现持续对花椒枝交互输运作业,2组拨齿机构的距离需满足条件:
在实际设计中,考虑到机器的紧凑性,机构间隙取不干涉拨齿运动的最小值。
3.1. 拨齿运动轨迹
3.2. 拨齿机构输运作业的条件
3.3. 拨齿机构、传送带、双齿啮合拉拽装置相互位置关系
3.3.1. 拨齿机构输运作业有效区间
3.3.2. 拨齿机构水平间隙
-
在输运作业中,要防止往复式切割器Ⅰ、Ⅱ的往复剪切力过大导致花椒枝无法喂入,同时约束花椒枝左右位移,故设计多组拨齿使花椒枝同向输运,且通过在拨齿表面添加柔性材料增大摩擦系数确保拨齿机构稳定输运花椒枝,并减少输运作业中对花椒果的损伤。图 7所示为输运作业花椒枝受力示意图,花椒枝输运方向为x轴,传送带柔性拨板方向为y轴,竖直方向为z轴,受力分析如下:
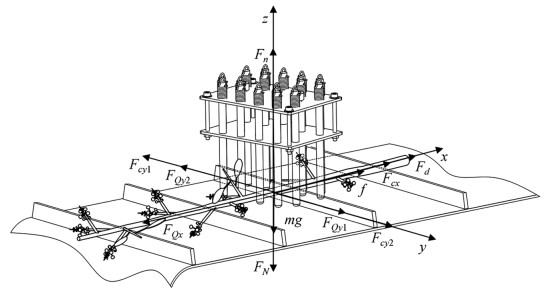
花椒枝输运至往复式切割器的条件为:Fcx、Fd、f三者合力大于FQx。在Fcy1、Fcy2的作用下使花椒枝y方向上被约束,其推力大小与剪切过程的受力情况有关; 在往复式切割器平均切割速度不变的情况下,剪切力FQx与花椒枝喂入速度有关。为探究剪切力FQx和花椒枝喂入速度的关系,需要通过力学试验进行分析和验证。
-
本试验仅对单组往复式切割器进行测定,原因是往复式切割器Ⅰ、Ⅱ对花椒枝的剪切方式相同,在剪切同一根花椒枝时,往复式切割器Ⅰ的剪切力FQx1与往复式切割器Ⅱ的剪切力FQx2近似相等,即:
将花椒枝置于往复式切割器之间,拉力传感器通过夹具与花椒枝一端相连,通过步进电机控制器调节丝杠转速。剪切力通过PST-50 kg拉力传感器采集,采样频率为0.2 s,测试平台如图 8所示。
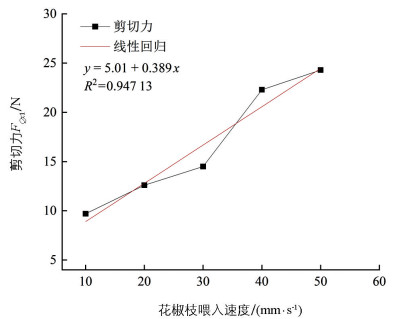
根据参考文献[5, 16]及预试验,将往复式切割器平均切割速度设置为800 mm/s,花椒枝喂入速度设置为10~50 mm/s,以10 mm/s间隔递增,完成5次试验。
花椒枝在输运过程中所受阻力主要来源于往复式切割器的剪切,为使所有花椒枝都能喂入,取各组试验剪切力的最大值。试验结果如图 9所示,分析得出:剪切力FQx1与花椒枝喂入速度呈正相关,决定系数(R2)为0.947 13。
4.1. 花椒枝输运作业受力分析
4.2. 花椒枝剪切力测定
-
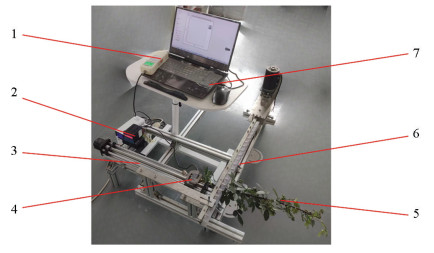
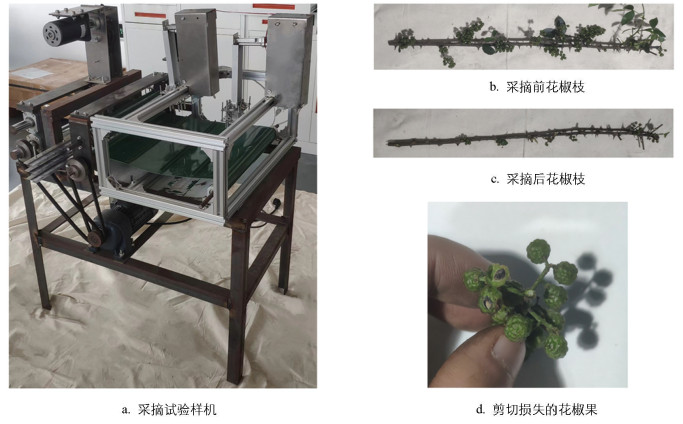
为确定分层剪切式青花椒采摘装置的最优工作参数,以2024年5月6日上午“下桩”的重庆市北碚区东升村青花椒枝作为试验材料,于同日下午在西南大学工科楼进行采摘试验,如图 10所示。花椒枝长度为237~682 mm,花椒枝头部端直径为6.71~13.23 mm,尖刺高度为7.78~16.89 mm,花椒枝含水率为48.85%~62.69%。
试验仪器与设备包括:青花椒采摘装置(自制,只安装了1组拨齿机构)、LQ-C20002型电子秤、VICTOR 6234P型光电式转速仪、游标卡尺、Inspire A450快速成型机。
-
根据分层剪切式青花椒采摘装置的理论分析,结合前期预试验,选取往复式切割器平均切割速度、花椒枝喂入速度以及拨齿下降速度为试验因素,采摘效率、采净率以及伤果率为评价指标,通过单因素试验确定了工作参数的取值范围,根据Box-Behnken设计法,进行3因素3水平正交试验,通过Design-Expert 13软件对试验结果进行优化求解,得到最优工作参数。采摘效率y1、采净率y2和伤果率y3的表达式分别为:
其中:m1为采摘青花椒质量(kg); m2为漏采青花椒质量(kg); m3为损伤青花椒质量(kg)。
-
根据分层剪切式青花椒采摘装置的参数设计及前期预试验,往复式切割器平均切割速度、花椒枝喂入速度、拨齿下降速度的取值范围分别为:600~1 000 mm/s、10~50 mm/s、20~100 mm/s。在取值范围内选取等差值的5个因子,在单因子变化的情况下,其他因子均选取中间因子作为试验值,依次进行单因素试验,试验结果如图 11所示。
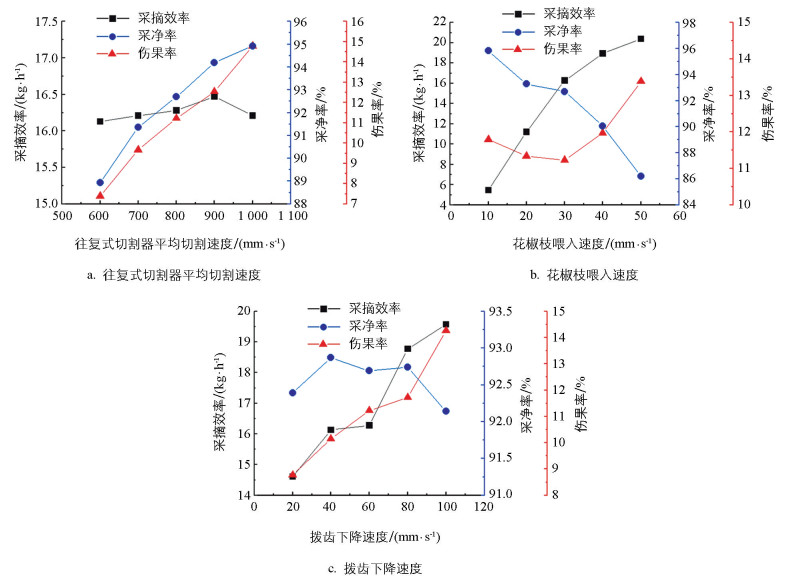
往复式切割器平均切割速度对评价指标的影响如图 11a所示。在往复式切割器平均切割速度增大的同时,采摘效率先增大后减小,采净率和伤果率逐渐增大。当往复式切割器平均切割速度在900~1 000 mm/s时,采净率小幅增大,伤果率大幅增大。当往复式切割器平均切割速度在600~900 mm/s时,剪切力减小,花椒枝更容易被喂入,采摘效率小幅增大; 花椒枝漏切的可能性减小,采净率增大; 花椒果被剪切的可能性增大,伤果率增大。当往复式切割器平均切割速度大于900 mm/s时,花椒枝在输运作业中被重复剪切次数较多,剪切掉的花椒果在掉落过程中多次与刀刃碰撞,伤果率大幅增大。为降低对花椒果的损伤,选取往复式切割器平均切割速度为700~900 mm/s。
花椒枝喂入速度对评价指标的影响如图 11b所示。在花椒枝喂入速度增大的同时,采摘效率逐渐增大,采净率逐渐减小,伤果率先减小后增大。当花椒枝喂入速度在10~30 mm/s时,花椒枝经过往复式切割器的时间变短,花椒果被剪切的可能性减小,伤果率减小; 当花椒枝喂入速度大于30 mm/s时,花椒枝的侧枝及花椒果未被剪切且花椒枝继续向前输运,花椒果通过往复式切割器时被挤压,采净率减小,伤果率增大。为获得较高的采摘效率,并保证较小的伤果率,选取花椒枝喂入速度为20~40 mm/s。
拨齿下降速度对评价指标的影响如图 11c所示。在拨齿下降速度增大的同时,采摘效率和伤果率逐渐增大,采净率在一定范围内波动,伤果率先大幅增大后小幅增大再大幅增大。当拨齿下降速度在20~60 mm/s时,拨齿下降过慢导致输运效果较差,花椒枝短时间内停留在往复式切割器中,伤果率增大; 当拨齿下降速度在80~100 mm/s时,拨齿快速下降与花椒果碰撞,撞击力增大,伤果率增大。为获得较好的花椒枝输运效果,并保证较小的伤果率,选取拨齿下降速度为40~80 mm/s。
-
通过花椒采摘单因素试验确定工作参数的取值范围,并根据Box-Behnken试验设计[23-25],得到试验因素水平(表 2)以及试验结果(表 3)。探究工作参数与评价指标的互作关系,并运用Design-Expert 13软件对表 3中的试验结果进行方差分析,如表 4-表 6所示,构建评价指标与工作参数之间的数学模型。
由表 4-表 6可知,模型显著性均为p<0.000 1,在舍弃不显著变量后,采摘效率、采净率和伤果率与试验因素的回归方程分别为:
由表 4可知,花椒枝喂入速度X2和拨齿下降速度X3的交互项对采摘效率呈显著性。如图 12a所示,当往复式切割器平均切割速度和拨齿下降速度作为固定因子时,采摘效率随花椒枝喂入速度的增加而不断增大,单位时间内通过往复式切割器的花椒枝数变多,采摘效率增大。
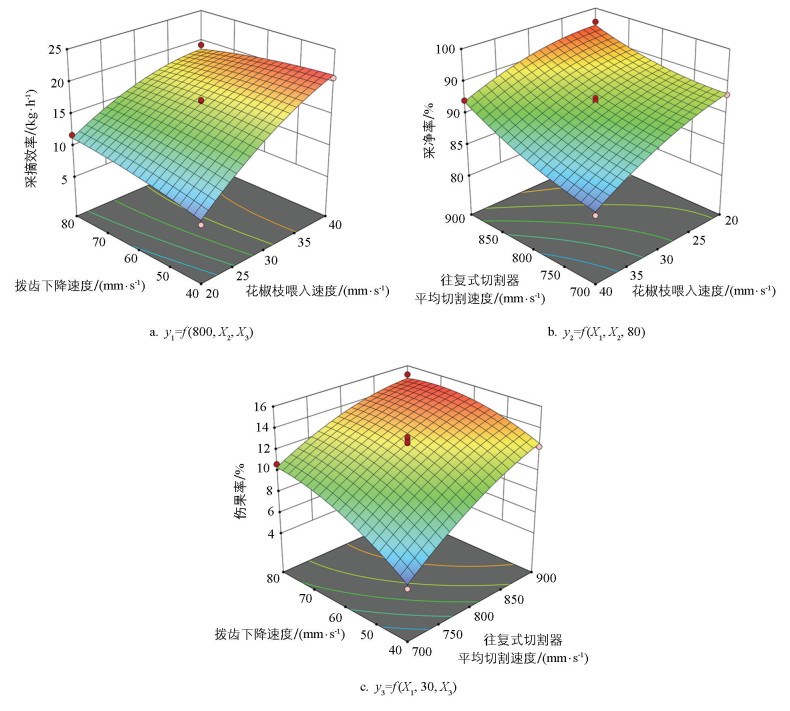
由表 5可知,往复式切割器平均切割速度X1和花椒枝喂入速度X2的交互项对采净率呈显著性。如图 12b所示,当花椒枝喂入速度和拨齿下降速度作为固定因子时,采净率随往复式切割器平均切割速度的增加而不断增大,由于单位时间内往复式切割器对花椒枝剪切的次数变多,采净率增大。当往复式切割器平均切割速度和拨齿下降速度作为固定因子时,采净率随花椒枝喂入速度的增大而减小,由于花椒枝被剪切的时间变短,花椒枝的侧枝及花椒果未被剪切且花椒枝继续向前输运,花椒果通过往复式切割器时被挤压,采净率减小。
由表 6可知,往复式切割器平均切割速度X1和拨齿下降速度X3的交互项对伤果率呈显著性。如图 12c所示,当花椒枝喂入速度和拨齿下降速度作为固定因子时,伤果率随往复式切割器平均切割速度的增加而不断增大,由于单位时间内花椒枝被剪切的次数变多,伤果率增大。当往复式切割器平均切割速度和花椒枝喂入速度作为固定因子时,伤果率随拨齿下降速度的增加而不断增大,由于拨齿快速下降与花椒果碰撞,撞击力增大,伤果率增大。
根据花椒采摘的要求,在伤果率较低的情况下,采摘效率和采净率越大越好,则设定约束条件为:
通过Design-Expert 13软件对正交试验结果进行优化求解,得到最优工作参数为:往复式切割器平均切割速度700 mm/s、花椒枝喂入速度28.19 mm/s、拨齿下降速度48.62 mm/s; 评价指标为:采摘效率15.995 kg/h、采净率90.361%、伤果率6.932%。为验证优化后工作参数的准确性,将往复式切割器平均切割速度设置为700 mm/s,花椒枝喂入速度设置为28 mm/s,拨齿下降速度设置为49 mm/s,在此优化方案下完成3次试验,取试验结果的平均值为试验值。
通过试验验证可知,在单采摘通道工况下,采摘效率为16.28 kg/h,采净率为90.69%,伤果率为7.37%,考虑花椒枝的随机性与测量误差,试验结果与优化结果具有较高吻合度。
5.1. 试验材料与设备
5.2. 试验方法
5.3. 单因素试验
5.4. Box-Behnken试验
-
1) 分层剪切是基于往复式切割结构,并结合“下桩”采摘技术,先后对花椒枝进行横向切割和竖向切割的采摘方式,该采摘方式可实现花椒枝全方位脱果,且在采摘过程中可避免出现因堵塞情况而影响采摘效率。
2) 以往复式切割器平均切割速度、花椒枝喂入速度和拨齿下降速度为试验因素,采摘效率、采净率和伤果率为评价指标开展了单因素试验和Box-Behnken试验,试验结果表明:往复式切割器平均切割速度与采净率和伤果率均呈显著正相关; 花椒枝喂入速度对采摘效率呈显著正相关,对采净率呈显著负相关; 拨齿下降速度对采摘效率和伤果率均呈显著正相关。
3) 通过Design-Expert 13软件对正交试验结果进行优化求解,得到最优工作参数为:往复式切割器平均切割速度700 mm/s、花椒枝喂入速度28.19 mm/s、拨齿下降速度48.62 mm/s。最优工作参数下的试验结果表明:在单采摘通道工况下,采摘效率为16.28 kg/h,采净率为90.69%,伤果率为7.37%。
 DownLoad:
DownLoad: