


 下载:
下载:
-
三维视频系统的开发和立体影像产品的制作有极大的市场前景和发展潜力[1-3].视频的违法复制和产品的非正常传播等现象是知识产权领域中普遍存在的尖锐问题.数字水印可以对信息实现有效的隐藏, 为版权保护提供了一种新思路[4-13].
对平面图像产品进行数字水印处理已经得到深入研究, 其中基于关系的水印算法比较成熟, 但都是针对平面图像.目前, 立体图像的水印算法比较缺乏.本文在深入研究成熟平面图像水印算法技术前提下, 以立体图像为载体, 充分发挥关系调制技术的优势, 提出了一种新型的盲水印算法.
全文HTML
-
立体图像是由左右两个相机在同一时刻对同一场景采集得到.
-
步骤1:确定对应图像块的极性.把原始图像均分为8×8块, 并做DCT变换处理, 由式(1)确定对应极性:
其中: Pt, k为对应的极性, X0, k为对应的直流系数, Xt, k为对应的中频系数, sk为对应的缩放系数, M为嵌入位数, K为原图像的块数, 同时满足0 < k≤K.
步骤2:获取二值化水印图像并作Arnold变换, 可以分散受攻击力度, 提高检测准确率; 其次是设置密钥, 密钥值设置为置换次数, 以确保水印的安全.
步骤3:将左右对应的图像块根据置乱的水印信息进行极性调制, 如果水印的信息是0, 就把图像块极性调制为相反; 如果水印信息为1, 就把图像块块极性调制为相同.对位于水印中的DCT系数进行以下变化:
其中:δm=|sk×X0, k|-|Xi, k|+K2, K1与K2依据水印的鲁棒性和添加水印的图像的不可感知性来选取.
步骤4:反变换水印中的DCT系数, 可以得到水印的立体图像.
-
步骤1:对要进行检测的图像就行DCT变换, 并且把图像分为8×8的方格.根据密钥1(sk)进行计算得出图像块系数的极性:
步骤2:确定水印信息:极性相同取为1, 极性不同取为0.
步骤3:由水印嵌入程序中的变换周期, 并结合相关的密钥2, 对上述的水印信息做反置乱处理, 可以获得符合要求的图像.
-
一般情况下, 水印的客观评价指标选用的都是NC值:
由于NC只反映水印图像(二值图像)中的1的检测准确率, 不能反映0的检测率, 只要保证1的失真小或者只要保证1的检测率就可以令NC值很大, 所以该评价指标欠佳. HC是本文定义的另一个评价指标, 是检测图像和原始图像的归一化值, 能反映检测图像与原始图像的整体相似程度:
1.1. 水印嵌入程序
1.2. 提取水印
1.3. 水印的客观评价
-
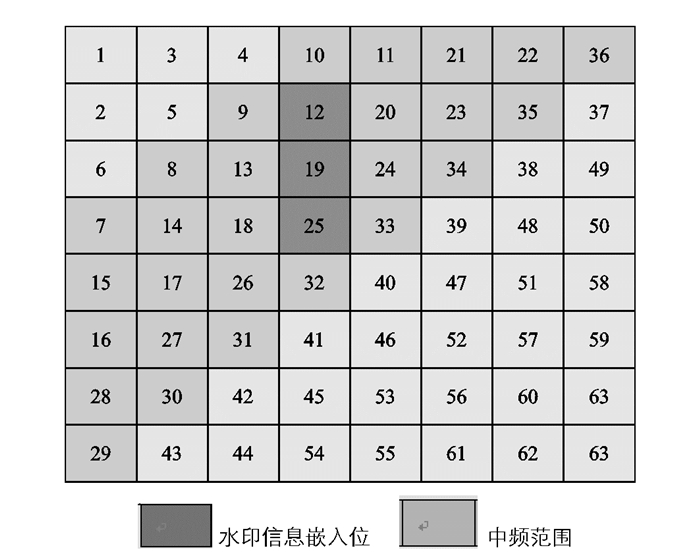
本文所使用的嵌入水印位置如图 1所示.将位于puppy序列中的第一时刻的图像作为立体图像对, K1取0.5, K2取5, 置乱次数为28, 水印大小为64×64.
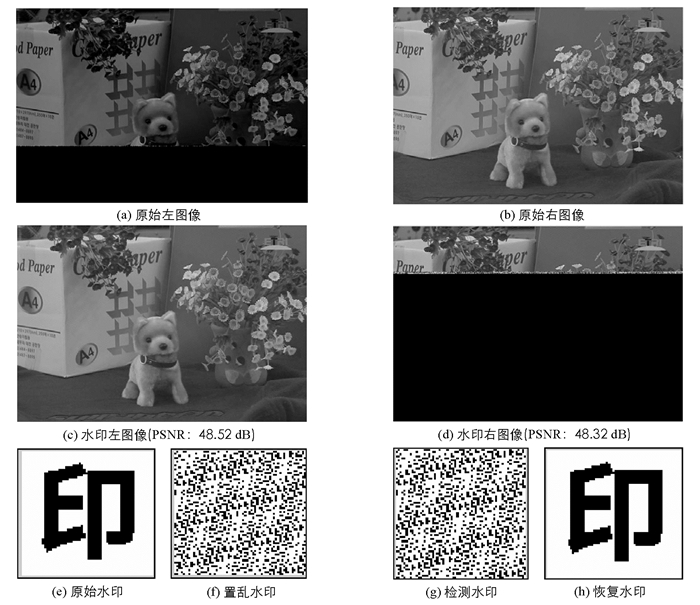
图 2为无攻击情况下得到的检测水印和立体图像对.从图 2可以看出, 添加水印的立体图像不仅在主观上无法感知, 并且在客观质量上能达到48 dB以上.水印图像在无任何攻击下能完全检测.
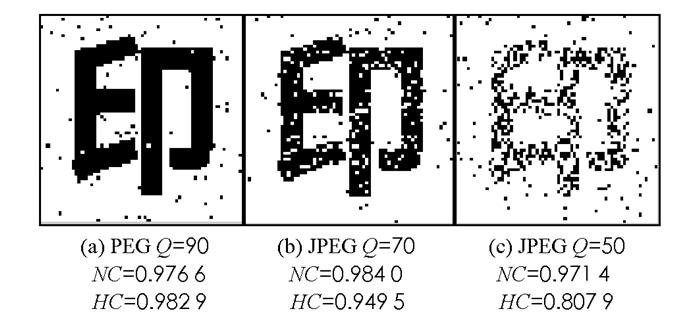
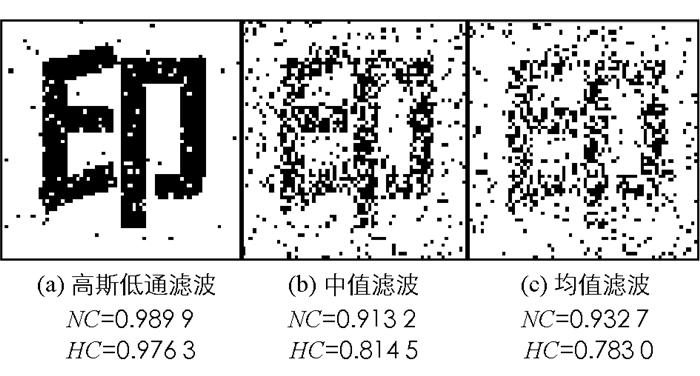
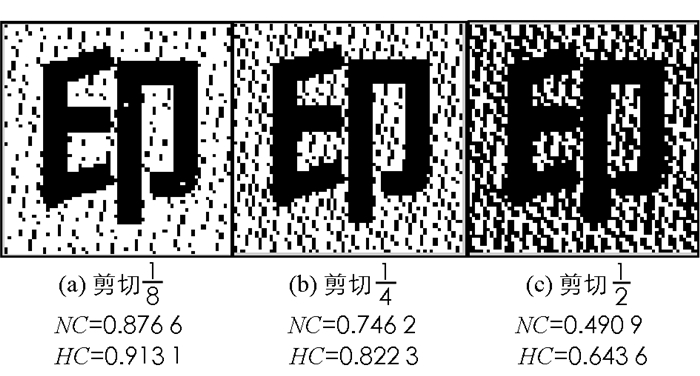
图 3-5给出了不同失真水平下的水印提取效果.在进行JPEG图片压缩操作时, 实验对象中的图像块会受到对称方向的攻击, 且攻击强度相同.实验发现, 绝大多数分块的极性不变, 一定程度上也会出现其变化趋势相同的情况, 所以对应提取物的鲁棒性很强.本文提出的算法在进行滤波处理时, 对于不同特征的波, 其表现出的鲁棒性也不同.经试验分析, 具有如下结论:高斯低通滤波对应的鲁棒性较高; 均值滤波与中值滤波对应的鲁棒性较低.
-
通过对图像水印经典算法的进一步研究, 提出一种新的立体图像盲数字水印算法.在嵌入位置和嵌入对策上做了一些改进, 从整体上看, 该算法表现出较强的鲁棒性.怎样更好利用立体图像的特点和从立体图像中找到一个更稳定的关系是下一步的研究重点.