


 下载:
下载:
-
家用汽车的数量逐年攀升,交通事故频发.在此背景下,拥有精确识别和精密计算能力的智能汽车受到越来越多大型汽车厂商的青睐[1-3].在环境识别方面,红外技术、超声波技术、视频成像技术、激光雷达技术和毫米波雷达技术等都是目前比较常用的技术手段[4].而其中以测量范围远、适应各种天气环境且价格便宜著称的毫米波雷达技术,拥有着不可替代的地位.
为了让驾驶员有充分的时间做出正确的反应,汽车防撞雷达需要在短时间内快速、准确地分辨出前方多个目标障碍物的距离、方位等信息.基于此,文中采用TI公司最新的单芯片77GHz LFMCW雷达传感器AWR1642,利用对4通道接收天线阵列接收到的回波信号在时、空域上分别使用快速傅里叶变换(FFT)和数字波束形成(DBF)算法对障碍物进行距离和方位探测,从而得到障碍物的距离和方位信息[5-6].该方案具有精度高、成本低、体积小等特点,可广泛应用于汽车障碍物的探测及避碰.
全文HTML
-
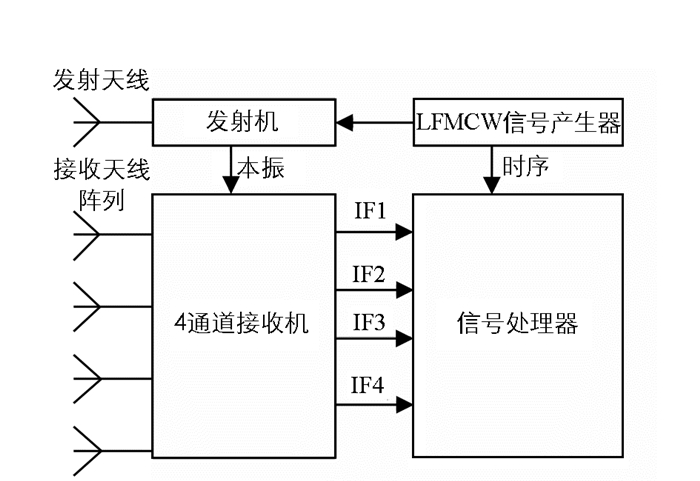
系统工作原理见图 1.
线性调频连续波(LFMCW)信号产生器产生周期锯齿波信号,经发射机放大和功分后,大部分能量送入发射天线,发射天线向空间辐射电磁波信号.另一小部分能量作为本振送入接收机,与进入接收机的4路回波信号混频,随后滤波、放大得到中频信号(IF1-IF4). 4路中频信号送入信号处理器经过快速傅里叶变换(FFT)、数字波束形成(DBF)、恒虚警目标检测(CFAR)以及单脉冲测角等处理,得到目标(障碍物)的距离和方位信息[7].
-
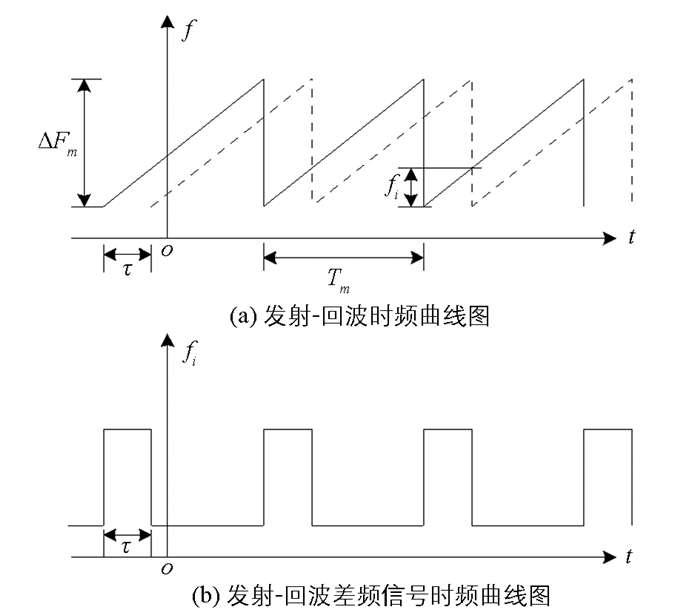
使用调频法测量目标的距离,其基本原理就是利用发射信号与目标回波信号之间的差频来确定目标距离[8].
设调制信号为理想锯齿波,且不考虑寄生调幅和多普勒频移的影响[9].目标静止状态下,锯齿波线性调频测距系统的发射-回波时频曲线图及相应的差频信号时频曲线见图 2.其中,Tm为调制信号的周期,τ为回波延迟时间,ΔFm为最大频偏,fi为发射信号与回波信号的差频频率.
由简单的三角关系可得,目标距离R可表示为
其中,c为光速,那么在调制参数ΔFm和Tm一定的条件下,差频fi与距离R成正比,测得差频即可计算出距离R.若目标相对雷达运动,此时回波信号延迟时间τ是变化的,差频fi也随之而变,计算R中最小值即为偏差量.由数字信号处理算法可知,FFT技术可分析差频频率,得到差频频率后根据公式(1)计算目标距离R[9].
-
通过阵列天线,数字波束形成(DBF)技术利用阵列天线的孔径,采用数字信号处理技术在期望方向形成接收波束[10].虽然单个天线的方向图是全向的,但是对阵列多个接收通道的信号,利用数字处理方法,对某一方向的入射信号进行补偿,由于传感器在空间位置不同而引起的传播波程差导致相位差,实现同相叠加,从而实现该方向的最大能量接收,完成该方向上的波束形成,来接收有用的期望信号,这种把阵列接收的方向增益聚集在一个指定方向上,相当于形成了一个“波束”[11].
若接收天线由N个等距线阵组成,相邻阵元之间的间距为d.考虑到m个远场的窄带信号入射到空间某阵列上[5].假设阵元数量和通道数量相同,则处理器需要接收来自N个通道的数据.接收信号矢量可以表示为
其中,X(t)=[x1(t),x2(t),…,xN(t)]T,为阵列接收快拍数据矢量;S(t)=[s1(t),s2(t),…,sN(t)]T,为信号矢量;N(t)=[n1(t),n2(t),…,nN(t)]T,为噪声矢量;A=[a(θ1),a(θ2),…,a(θm)]T,为N×M维导向矢量矩阵.
在DBF过程中,假设信号的来波方向为θ,该方向的导向矢量为
式中,k为波束数,k=2π/λ.为了实现空域滤波,对单一信号源x(t)=as(t)+n(t)采样,进行加权求和,加权后天线阵的输出为
式中,W=[W1,W2,…,WN]T为数字波束形成的权矢量.
当W对某个方向为θ0的信号同相相加,即W=a(θ0)时,输出y(t)的模值最大.因此波束实现了对方向角θ的选择,即实现空域滤波[5].
在不同方向进行DBF处理时需要采用不同的矢量,对方向θ的权矢量W为
若将DBF处理搜索的波束的角度按式
将式(6)带入式(5),则权值W为
由此可见,权值W为一组复氏基,因此,可以利用离散傅立叶变换(DFT)或快速傅立叶变换(FFT)同时得到N个波位的DBF处理结果.
由上式可得,使用DBF算法,能够探测到的角度θ的范围为
$\left[-\arcsin \frac{\lambda}{d}, \arcsin \frac{\lambda}{d}\right]$ ,角度分辨率为$\frac{\arcsin \frac{\lambda}{2 d}}{N}$ .
1.1. 系统组成
1.2. LFMCW测距原理
1.3. DBF测角原理
-
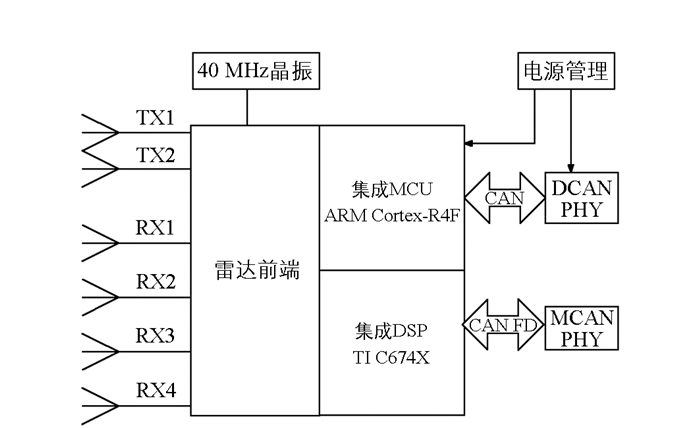
AWR1642是一款工作在76~81 GHz频段的单芯片毫米波雷达传感器,具有2个发射和4个接收通道,针对短距离和超短距离应用,主要用在盲点监测、变道辅助、停车辅助、路口交通警报、占用检测、简单手势识别和车门开启应用等场合[12-13].
AWR1642构建在TI的低功耗45 nm RFCMOS工艺之上,实现了一个具有内置PLL和模数转换器的单片实施2TX,4RX系统.内部集成了DSP子系统,该子系统包含TI用于雷达信号处理的高性能C674X DSP;同时也包含1个基于ARM R4F的处理器子系统,该子系统负责无线电配置、控制和校准,可以运行汽车开放式系统架构(AUTOSAR)、集群和跟踪算法(图 3).其主要性能指标见表 1.
-
根据AWR1642传感器提供的技术参数,设计汽车防撞雷达系统,其主要技术指标见表 2.
-
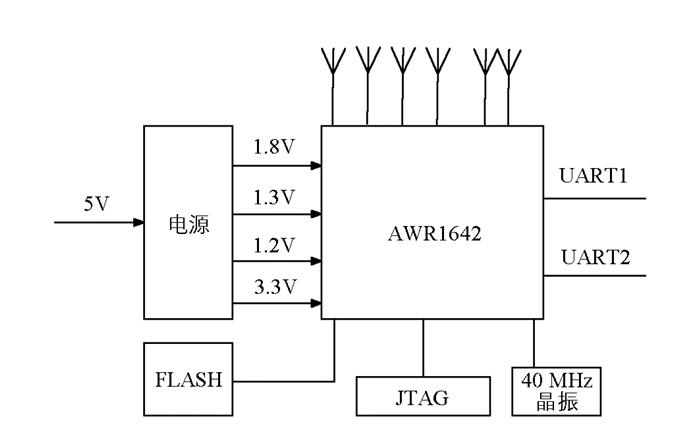
汽车防撞雷达由AWR1642传感器,DC-DC电源模块,FLASH,1个JTAG接口以及2个UART接口组成(图 4). DC-DC电源模块将输入5V电源转换为AWR1642所需的1.8 V,1.3 V,1.2 V以及3.3 V电源,40 MHz晶振为系统提供始终信号,JTAG为程序加载及调试接口,UART为通信接口.
-
调制带宽决定距离分辨率(ΔR):
其中c为光速,B为调制带宽.系统要求距离分辨率ΔR≤1 m,那么带宽必须满足B≥150 MHz.考虑一定的余量,调制带宽选择200 MHz.
-
由雷达理论可知,调频连续波雷达具有多普勒-距离耦合效应,为了使多普勒耦合效应不引起测距误差,调制周期重复频率需要满足:
而
$f_{d \max }=\frac{v_{\max }}{\lambda} \approx 18 \mathrm{kHz}$ 那么fN≥36 kHZ,调制周期Tm≤27.7 μs,因此Tm选择为27 μs. -
积累时间越长,最大作用距离越大,但是积累时间过长,有可能引起跨距离单元或跨速度单元.系统要求距离分辨率ΔR=1 m,测量目标的最大速度为vmax=70 m/s,那么积累时间T必须满足:
另外,积累时间一般选择为调制周期Tm的2N倍,因此综合考虑,积累时间T选择27×512=13.824 ms.
-
根据雷达方程
其中发射功率Pt=12 dBm,积累时间T=13.824 ms,发射天线增益Gt=12 dB,接收天线增益Gr=18 dB,波长λ=0.003 9,目标雷达反射截面积σ=0.5 m2,常数(4π)3kT0=-171 dB,噪声系数Fn=15 dB(76~77 GHz),检测因子D0=13 dB,系统损耗L=6 dB.将参数带入,可得Rmax=100 m.说明AWR1642平台配合合理的参数选择,能满足最大作用距离的要求.
-
由1.3节分析可知,DBF的角度分辨率,即波束宽度
$\theta=\frac{\arcsin \frac{\lambda}{2 d}}{N}$ ,单元间距d=λ/2,单元数N=4. 4通道DBF的理论波束宽度为22.5°,考虑到波束展宽,扫描时实际波束宽度不超过30°.根据经验,DBF的测角精度一般可达到波束宽度的1/15,甚至更好.因此测角精度为30/15=2°,说明对AWR16424通道接收机的回波信号采用DBF算法可以达到较好的测角精度.
3.1. 总体方案设计
3.2. 主要参数选择
3.2.1. 调制带宽的选择
3.2.2. 调频周期的选择
3.2.3. 积累时间的选择
3.3. 主要技术指标论证
3.3.1. 最大作用距离
3.3.2. 测角精度
-
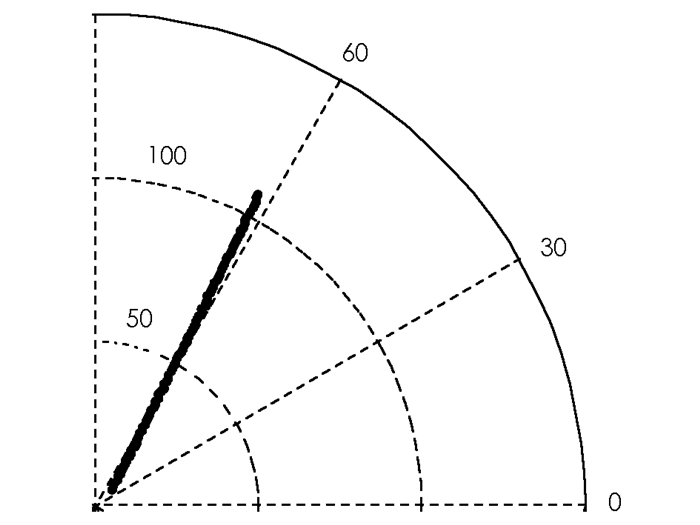
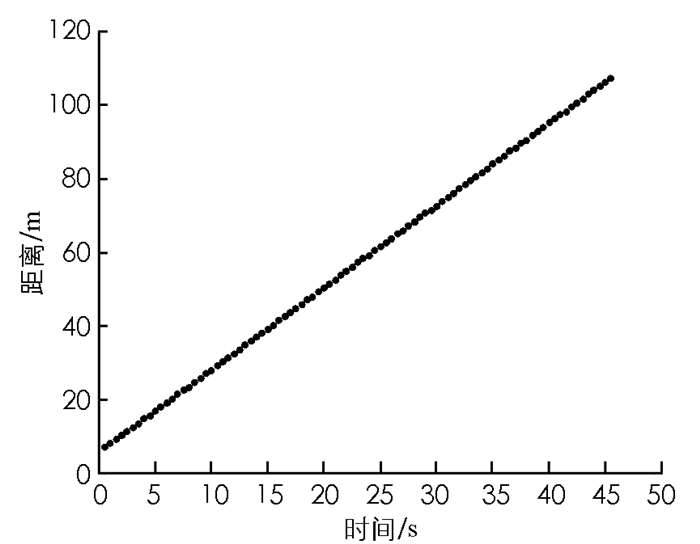
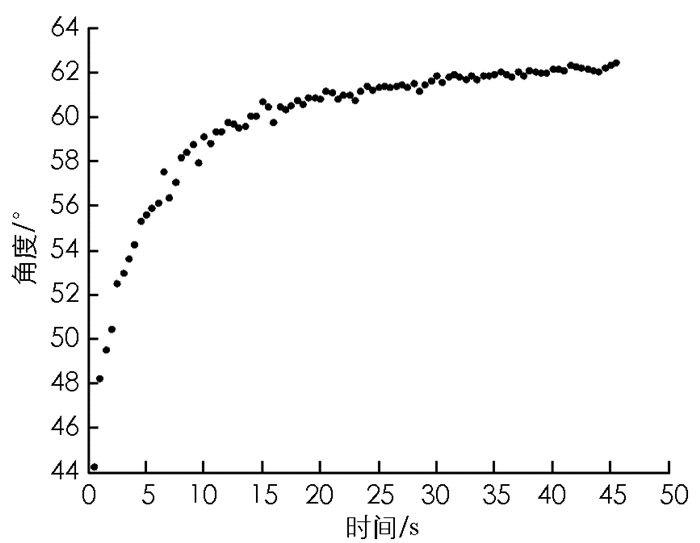
文中介绍了汽车防撞雷达的系统工作原理,重点阐明了LFMCW测距原理、DBF测角原理.在TI公司最新的雷达传感器AWR1642的性能指标基础上,给出了系统的主要技术指标,并对其中的主要参数进行了计算和论证.结果和实验均表明,该方案可行,测量精度高,可广泛应用于汽车障碍物的探测及避碰.