


 下载:
下载:


-
中国是农业生产大国,施肥是作物生产过程中的重要环节,能提高作物的产量和质量,数据显示化肥对我国粮食产量的贡献率达40%~60%[1].但目前我国化肥的利用率较低,仅为30%~40%[2],肥料浪费较为严重,且造成了部分地区土壤板结和地下水污染等环境问题[3-4].因此有较多学者提出了精量施肥或变量施肥[2, 5-8],其中以3S技术为基础的“测土配方施肥”技术[9-12]就是联合国在全世界推广的先进农业技术,也是精准农业的重要技术之一. “测土配方施肥”技术一般需要对较大规模的土壤养分进行调查,其检测过程复杂而繁琐,需要耗费大量人力物力.由于农田肥力即使在较小空间上的分布也存在着较大的差异性,加上我国目前的民用GPS精度难以达到精确施肥的精度,根据作物实际生长需求进行配方施肥的推广实施难度较大.定量施肥指施肥机在单位面积或单位长度上的施肥量与设定的施肥量一致,从而进行定量施肥.定量施肥对施肥量的控制精度高,排肥均匀性好,无需采集作业前的土壤数据,容易推广实施.条施是施肥常用方式之一[13],条施肥料离作物根部近,易被作物吸收,其肥料利用率高,肥料有效时间比撒施长,能够促进根系向下生长,有利于抗旱.因此,本文对条施机进行了定量施肥控制系统设计,为施肥机控制系统的设计提供了参考.
全文HTML
-
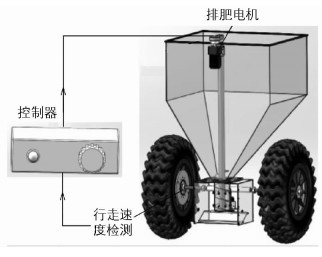
条施机[14-16]主要包括排肥电机、齿轮传动机构、螺旋排肥器、行走速度检测装置、肥料口挡板装置、控制器、肥料箱和行走支撑装置等,如图 1所示.排肥电机选用直流电机,螺旋排肥器竖直安装,直流电机通过齿轮传动机构驱动螺旋排肥器排肥.行走速度检测装置主要由霍尔传感器和磁铁组成,磁铁共12个,均布于行走轮圆周上.工作人员推动条施机在田间施肥,当作业开关打开,控制器检测工作人员当前设置的施肥量和条施机当前行走速度,并根据检测到的设置施肥量和行走速度调制直流电机的脉冲宽度PWM(Pulse Width Modulation),从而达到控制直流电机转速的目的.由于螺旋排肥器由直流电机驱动,控制器控制直流电机转速即是控制螺旋排肥器转速,而螺旋排肥器转速是施肥量的直接影响因素,因此控制器可实现条施机定量施肥的目的.
-
施肥机定量施肥需保证肥料在施肥土地面积上均布,由于施肥机施肥方式为条施,因此需保证肥料在施肥距离上均布.根据农业标准《施肥机械质量评价技术规范》[17],施肥量与施肥距离的关系可由行走轮转动圈数表示
式中:η为行走轮转动圈数;L为施肥距离,m;δ—滑移率,%; D轮为行走轮直径,m;Q为施肥机设置施肥量,kg/hm2;q为施肥机实际排肥量,g;a为平均行距,m;M为机具的行数.由式(1)、(2)可得到
由式(3)可知,平均行距和机具行数为常数,假设滑移率很小,则设置施肥量设定好后,施肥机实际排肥量仅与施肥距离有关,且成正比关系.
螺旋排肥器竖直安装,其每分钟排肥量为
式中:q′为每分钟排肥量,g/min;D为螺旋排肥器外径,m;d为螺旋排肥器内径,m;l为螺距,m;φ为肥料充满系数,0.7~0.95;n为转速,r/min;p为肥料密度,kg/m3.
由式(4)可知,螺旋排肥器设计参数确定后,其外径D、内径d和螺距l为常数,肥料充满系数φ和肥料密度p与肥料性质有关,选定肥料后二者亦可视为常数,因此控制螺旋排肥器转速即可对排肥量进行控制.由于螺旋排肥器由直流电机驱动,控制变量可由螺旋排肥器转速转化为直流电机转速.
-
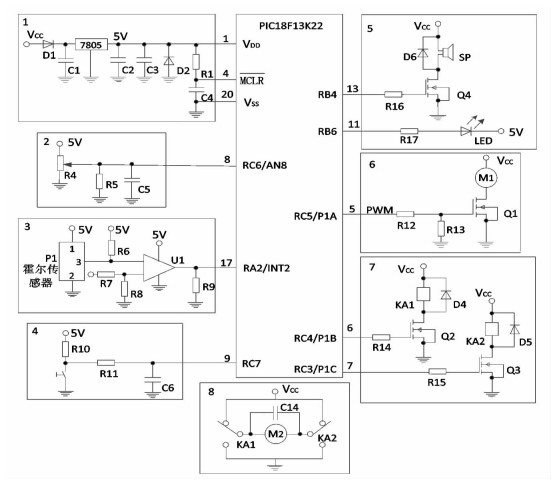
条施机定量施肥控制系统的信号输入源主要为行走检测装置的霍尔传感器,执行机构为排肥电机和肥料口挡板装置的挡板电机.控制系统通过相邻两个霍尔脉冲信号的间隔时间计算出施肥机当前行走速度,并根据该行走速度调节排肥电机PWM信号的占空比,从而控制排肥电机转速.控制系统选用的主控芯片为PIC18F13K22,整体电路包括排肥电机驱动控制模块、施肥量设置模块、行走速度检测模块、挡板电机驱动控制模块、电源模块、作业开关检测模块和报警模块,如图 2所示.
排肥电机由MOS管驱动,由于采用单MOS管驱动,主控芯片选择了单PWM输出模式.挡板电机涉及到正反转,因此选用了两个继电器驱动,主控芯片通过控制继电器不同开合情况使挡板电机正转或反转.施肥量设置由主控芯片的ADC(Analog-to-digital Converter,模数转换器)模块检测,ADC模块将模拟输入信号转换为电信号的10位二进制表示,参考电压选择VDD,通过设置施肥量电位器输入主控芯片电压的阻值,即可设置通道AN8的AD采样电压,经AD转换后的值为
式中:ADvalue为AD转换值;uAD为AD采样电压,V;VDD为主控芯片供电电压,V.由于uAD∈[0,5 V],则ADvalue∈[0, 1024].
-
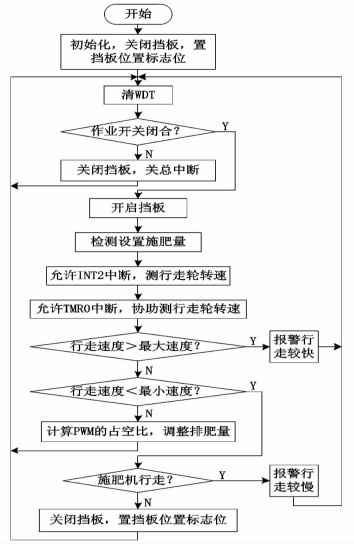
条施机定量施肥控制系统的软件程序根据硬件电路进行模块化设计,其软件程序模块与电路设计的模块相辅相成,包括施肥量设置程序,行走轮行走速度检测程序,排肥电机驱动控制程序,肥料口启闭程序,报警程序等模块,其主程序流程图如图 3所示.
控制器接入电源后,控制系统先进行初始化,并使挡板电机正转以关闭肥料口挡板,避免肥料泄露并标志挡板位置.每次进入主程序,控制系统都清看门狗以避免程序进入死循环.当作业开关闭合后,主控芯片发送开启挡板命令,并进入设置施肥量检测子程序以检测当前设置的施肥量.在整个施肥过程中,控制系统都将实时监测施肥机的行走速度,行走速度的检测由INT2中断和TMR0中断协同完成.主控芯片允许INT2中断,当霍尔传感器检测到磁感应信号后,将发送一个脉冲信号给INT2引脚,主控芯片接收到该脉冲信号时,立刻进入INT2中断程序. TMR0定时器测定两个相邻脉冲信号之间的间隔时间,为了避免间隔时间过长,主控芯片允许TMR0定时器中断,当检测的间隔时间溢出TMR0定时器设定的最大时间后,TMR0定时器中断标志置1,程序进入TMR0定时器中断程序.根据测定的脉冲信号间隔时间,主控芯片可计算出施肥机的行走速度,并对行走速度的快慢进行判断,若行走速度超过设置的最大速度,将发出报警行走较快信号,提示施肥人员减慢行走速度;若行走速度低于设置的最小速度,主控芯片需要判断施肥机行走还是停滞,若是施肥机处于停滞状态,主控芯片将关闭挡板并置挡板位置标志位,避免施肥机肥料泄露;若行走轮行走但行走速度过于慢速,主控芯片将发出报警行走较慢信号,提示施肥人员加快行走速度;若行走速度为正常速度,即介于最大速度和最小速度之间,主控芯片将根据实时监测的行走速度计算PWM的占空比,通过控制排肥电机电压调节其转速,从而调整排肥量,进行定量施肥.
-
条施机行走时,霍尔传感器接收磁感应信号并发送给主控芯片,主控芯片内部的定时器TMR0通过测两个相邻磁感应信号的间隔时间计算出条施机行走速度.
式中:V为条施机行走速度,m/s;p为磁铁个数;δt为相邻磁感应信号的间隔时间,s.
主控芯片时钟频率为8 M,其指令周期为0.5 μs,由于TMR0采用1:8预分频,则其计数周期为4 μs,因此两个相邻磁感应信号的间隔时间δt由下式表达:
式中:TTMR0为定时器TMR0的计数值.
-
施肥机为定量施肥,施肥量只取决于施肥机的行走距离,因此需设计计算施肥机的单位距离排肥量.单位距离排肥量与施肥机的设置施肥量有关,设置施肥量介于可设置区间[Mmin,Mmax],对应的设置比区间为[(Mmin/Mmax)×100%,100%].设置施肥量通过调节电位器控制AD采样电压,得到AD转换后的值进行换算
式中: κ为施肥量设置比;MDvalue为施肥量配比参数.由于κ∈[(Mmin/Mmax)×100%,100%],联立式(7),(8),则施肥量配比参数为
式中:Mmax为最大设置施肥量,kg/hm2;Mmin为最小设置施肥量,kg/hm2.则设置施肥量为
式中:M为设置施肥量,kg/hm2.假设垄宽为B,单位公顷垄长即为106/B,则单位距离排肥量为
式中:m为单位距离排肥量,kg/m;B为垄宽,m.
-
螺旋排肥器由排肥电机驱动,控制排肥电机电压即是控制排肥电机和垂直螺旋转速,从而精确控制排肥量.为了得到排肥电机电压与排肥量关系,做了相关的基础数据试验,该试验通过ATTEN电源TPR3020S给排肥电机施加3~12V的电压,并称排肥电机在不同电压值下垂直螺旋20 s内的排肥质量.试验所用肥料为颗粒肥料,颗粒平均直径2 mm.重复多次试验,排肥量取平均值,试验数据如表 1所示.
分析表 1数据可知,当电压为3 V时,排肥电机功率不足,因此本排肥电机排肥的实际有效电压大于等于3.5 V,将序号1-4的试验数据进行回归分析,得到排肥电机电压与排肥量的回归方程为
式中:
$ \hat{M}$ 为单位时间排肥量,kg/s;相关系数r= 0.009,kg/(V·s).该回归分析调整后的拟合优度为0.995,显著性水平为0.02,具有好的回归性和显著性水平.由式(6),(11),(12)可进一步得到排肥电机电压与行走轮行走速度和单位距离排肥量的关系
-
PWM占空比定义为PWM脉冲宽度与PWM周期的百分比,在电路中反映为排肥电机电压与电源电压的百分比
式中: Duty为PWM占空比,%;VCC为电源电压,V.
联立式(6)-(15)得到PWM占空比为:
3.1. 电路设计
3.2. 软件设计
3.3. 定量施肥实现
3.3.1. 条施机行走速度计算
3.3.2. 单位距离排肥量计算
3.3.3. 排肥电机电压与排肥量关系
3.3.4. PWM占空比计算
-
条施机定量施肥控制系统设计完成后,进行了田间试验,图 4是条施机实物图,图 5是田间试验图.田间试验时,施肥作业前用电子秤对肥料箱中的肥料进行称质量,施肥作业后再对其剩余肥料进行称质量,两次称质量差值即为作业施肥量.施肥距离由皮尺测量,根据施肥量与施肥距离可计算出单位长度的实际施肥量,将设置施肥量与实际排肥量比较,得出条施机的施肥偏差[17].
式中:γ为施肥量偏差,%;Wq为作业前肥料质量,kg; Wh为作业后肥料质量,kg;L为施肥距离,m;F为给定施肥量,kg/m.
每隔10 m测量一次施肥量,设置施肥量分别为300,450,600,750 kg/hm2,平均行距1.2 m,则每10 m对应的施肥量分别为360,540,720,900 g,试验数据如表 2所示.
从表 2可以看出,条施机设置施肥量为300~750 kg/hm2,其定量施肥控制系统的最大偏差为5.28%,平均偏差为4.49%,定量施肥的控制精度较好.
-
本文对条施机的定量施肥原理进行了研究,在此基础上设计了定量施肥控制系统,包括电路设计和软件设计,并对条施机的行走速度、单位距离排肥量、排肥电机电压与排肥量关系和PWM占空比进行了计算分析.田间试验表明,条施机设置施肥量为300~750 kg/hm2,其定量施肥控制系统的最大偏差为5.28%,平均偏差为4.49%,定量施肥的控制精度较好.